一种UUV智能应急安全控制自救系统设计
2019-11-13 00:46张安通徐令令肖冬林
水下无人系统学报 2019年5期
张安通, 徐令令, 王 健, 肖冬林, 张 波
一种UUV智能应急安全控制自救系统设计
张安通, 徐令令, 王 健, 肖冬林, 张 波
(中国船舶科学研究中心, 江苏 无锡, 214082)
针对无人水下航行器(UUV)航行作业时面临的安全性问题, 提出了一种智能应急安全控制自救系统, 该系统采用了电磁耦合的工作模式, 其基本原理是通过直流线圈产生与永磁体强度相同的反向磁场, 以消除电磁铁的磁力, 并利用弹簧力将负载抛掉。通过分析线圈电磁力与线圈匝数等参数的对应关系, 给出了电磁铁设计方法, 在系统设计时通过在滑道中设置单向斜坡扰动结构, 以及在控制机制中采用故障优先权联锁等, 实现了系统的低功耗及高可靠性。湖上试验验证表明, 该系统对于提高中小型UUV在复杂海洋环境中的安全性具有实用价值。
无人水下航行器; 安全性; 电磁耦合; 自救系统
0 引言
无人水下航行器(unmanned undersea vehicle, UUV)[1]在水下航行作业时, 面临着复杂环境的影响和考验, 如浪流环境对内部仪器设备的震荡冲击、温跃层[2]导致的掉深超限、海洋微生物附着等; 同时UUV也面临着自身设备或技术状态的可靠性问题, 如深度传感器失灵、控制系统故障、电池能量耗尽等, 这些因素均给UUV的水下作业带来极大的安全风险, 甚至导致UUV的丢失破坏。因此, 为了保证UUV在出现上述故障或紧急情况时的安全性, 开展相应的智能应急安全控制自救技术研究具有重要意义。
UUV应急安全自救技术[3-4]通常是在应急工况下紧急抛弃部分载荷, 产生正浮力自动上浮至水面, 启动通信定位系统从而达到自救目的。目前大型深海UUV所用的应急安全控制方法主要有[5-7]: 1) 利用液压驱动系统油压将潜水器与压载(配重块、蓄电池、机械臂等)强制分开, 同时还设置了汽压式脱离螺栓, 在液压系统故障时将压载及部分液压脱离装置一同抛弃, 实现双保险; 2) 在载人耐压球内部伸出一根释放轴, 带动外部凸轮转动将挂钩脱开, 释放压载; 3) 采用爆炸螺栓[8], 利用所装填的火药产生的爆轰波对螺栓本体产生拉伸及剪切效应, 使指定部位断裂完成解锁。前2种安全控制方法适用于负载能力较大的载人潜水器, 后一种脱离方式更适用于导弹等非水密要求航行器。
针对中小型UUV负载能力小、布置空间有限等特点, 文中提出一种智能应急安全控制自救系统, 该系统采用了电磁耦合的工作模式, 将水下航行器的稳定翼作为抛载载荷, 执行机构无须耐压封装, 使系统具有体积小, 质量轻, 阻力小等优点。同时文中通过分析线圈电磁力与线圈匝数等参数的对应关系, 给出了电磁铁设计方法, 在系统设计时通过在滑道中设置单向斜坡扰动结构, 以及在控制机制中采用故障优先权联锁等, 保证了系统的低功耗及高可靠性。
1 系统构成
智能应急安全控制自救系统构成见图1, 主要由智能故障识别与触发系统、应急安全装置和应急电源3部分组成, 同时融合UUV深度传感器、航行控制器和通信系统配合使用。系统在航行器上的安装示意图见图2, 应急安全装置安装在水密耐压舱外部, 故障识别与触发系统和应急电源内置在水密耐压舱中。其中: 故障识别与触发系统主要检测故障信息, 并决定是否启动执行应急安全控制自救流程; 应急安全装置用于执行抛载动作, 在得到应急触发控制指令后将载荷抛弃; 应急电源可以独立为系统提供电能。深度传感器、航行控制器信号作为输入信号, 供故障识别和触发系统判断是否允许触发应急安全自救流程, 这些设备电源由航行器主电源提供。

图1 智能应急安全控制自救系统原理图
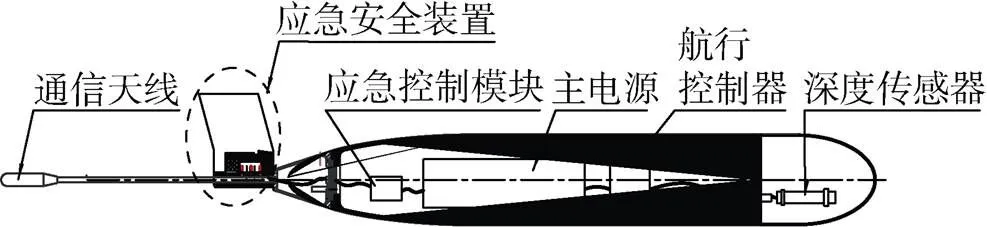
图2 应急安全装置安装示意图
1.1 故障智能识别和触发系统
故障智能识别和触发系统包含以下几部分。
1) 深度智能识别部分: 由图1虚框中的阻抗匹配、信号调理和比较/自锁电路组成, 检测深度传感器的输入信号, 判断深度信号是否超限。
2) 故障优先级智能识别部分: 当有故障信号输入时, 判断是否触发系统进行应急自救。
3) 驱动模块: 一旦触发应急安全自救流程, 驱动模块开始工作可为应急安全装置和自救通信设备提供独立应急电源, 在未触发应急安全自救流程时, 该部分不工作, 处于无功耗值守状态。
1.2 应急安全装置
应急安全装置结构示意图见图3, 其包含抛载翼、压缩弹簧、电磁铁[9]和固定基座几部分。抛载翼安装在固定基座上, 为铸铁材料制作而成, 外表面喷涂防锈漆, 压缩弹簧和电磁铁嵌入式安装在固定基座中, 与抛载翼均为面接触。固定基座结构示意图见图4, 基座上方设置有导向槽和卡槽, 当抛载翼向后弹出时, 一方面可以发挥向后的导向作用, 另一方面可以承受侧向力以及一定的侧向弯矩, 当航行器在航行过程中受到侧向扰动或撞击时, 依然可以保证可靠性, 避免误抛载。同时在导向槽的一侧还设置有斜坡扰动结构, 使抛载翼弹出时产生侧倾, 一方面使抛载翼与固定基座脱开, 另一方面使抛载翼产生1个侧向弯矩, 确保其能够可靠抛掉, 增强了装置的可靠性。电磁铁为断电吸盘式电磁铁[10], 断电状态下具有磁性吸力, 可以克服压缩弹簧的弹力将抛载翼牢牢吸住, 通电时电磁铁失去磁力, 此时压缩弹簧将抛载翼弹开, 抛载翼在自身重力作用下脱离UUV。
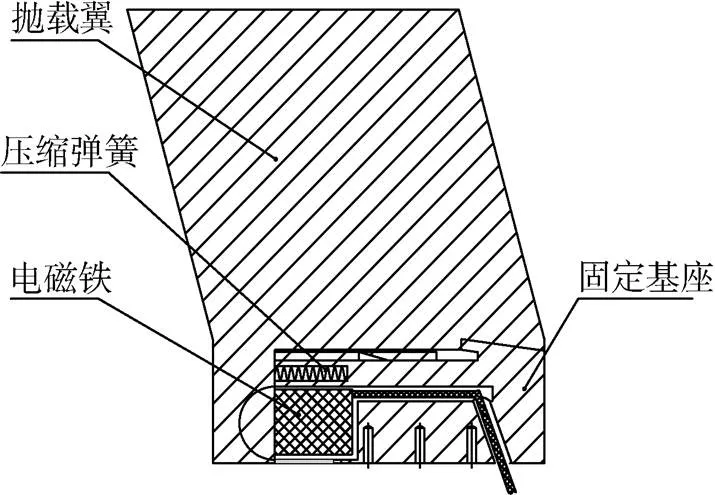
图3 应急安全装置结构示意图
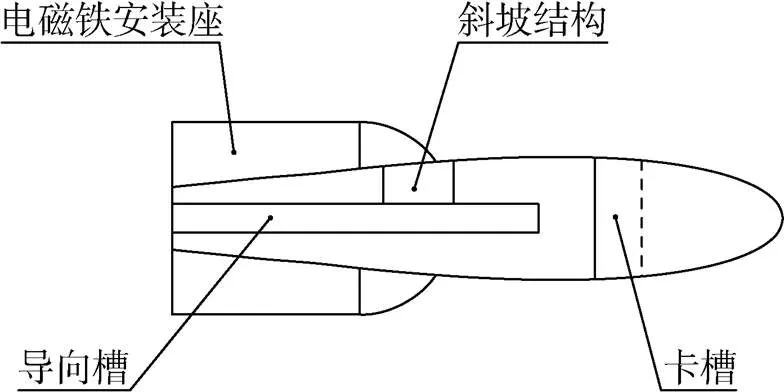
图4 固定基座俯视图
1.3 应急电源
应急电源包含12 V和5 V这2种规格, 5 V电源通过电池组稳压后提供, 给故障识别与触发系统提供长期工作电流。12 V电源通过电池组不稳压提供, 在执行应急安全自救流程后开始工作, 为电磁铁提供瞬时电能, 并向全球定位系统(gl- obal positioning system, GPS)及铱星通信提供长时间的应急电能。在未触发应急安全自救流程时, 12 V无电流输出。
1.4 自救通信
一旦执行应急安全自救流程, 则采用测试回路自锁和应急电源供给回路(驱动模块)自锁的双冗余自锁机制, 确保应急安全自救流程不再受外部信号干扰, 增加抛载自救措施的执行可靠性。应急自救通信设备由UUV的通信设备GPS和铱星通信组成, 该部分设备正常工作时由UUV主电源提供电力, 在应急安全自救模式启动后强迫投入工作, 采用主电源和应急电源同时供电模式, 即使在主电源失效的情况下依然能获得应急电能, 以建立和陆上基站的通信连接, 确保任意一路电源中途失效均不影响自救通信信息的发送。
2 系统工作模式及流程
应急安全自救系统工作模式分为休眠待机状态、联锁状态和抛载自救3种技术状态。休眠待机状态即无故障信息状态, 输出接口信号均为低电平, 此时系统类似于休眠, 维持检测电路的基本工作, 由5 V电压供电, 以极低的电流维持工作, 维持电流0.3~0.5 mA; 联锁状态是指当深度超深或浮力调节系统信号异常, 而航行控制器不允许触发应急安全自救流程, 此时处于唤醒模式, 但被航行控制系统联锁, 不执行应急安全自救流程, 此时仍然只由5V电压供电; 抛载自救状态指该系统触发了应急安全自救流程, 进入紧急上浮自救状态。具体工作原理及流程见图5。

图5 应急安全保护流程图
如图所示, 当UUV正常工作时, 应急安全装置的电磁铁处于断电状态, 此时电磁铁吸附力较大, 能够克服压缩弹簧的弹力将抛载翼牢牢吸住; 而当故障识别和触发系统有应急信号触发后, 上电触发线路使电磁铁上电, 在线圈反向磁场的作用下, 电磁铁吸力减弱, 抛载翼在弹簧弹力及重力的作用下与固定基座分离, 抛载翼沿固定基座上的导向槽向后移动, 在滑道设置的单侧斜坡扰动结构的作用下, 抛载翼与固定基座完全脱离。此时UUV形成正浮力上浮至水面, 应急电源给通信系统供电, 通信系统持续向远程岸基指挥系统发送报警信息及自身坐标位置, 等待打捞回收。同时在启动应急自救流程后, 则采用测试回路自锁和应急电源供给回路(驱动模块)自锁的双冗余自锁机制, 确保应急自救流程不再受外部信号干扰。
3 故障智能识别机制
3.1 应急智能控制故障模式
1) 航行控制器检测到严重故障信息
航行控制器检测到严重故障信息, 包含控制器故障、深度传感器故障、核心设备故障等影响系统运行时, 执行抛载自救流程。
2) 主电源失电
航行控制器与该系统紧急抛载信号在初始化状态为低电平, 要求抛载状态为高电平, 主电源失电后航行控制器失电时, 该输出端口出现高阻, 对于该系统体现为高电平, 执行抛载自救流程。
3) 浮力调节系统故障
当浮力调节系统故障时, 该系统向航行控制器申请抛载自救, 如果航行控制器同意抛载自救或无响应, 则在延时5 s后执行抛载自救流程。
4) 深度超深
当UUV下潜深度超过设置的抛载深度20%时, 系统将向航行控制器申请抛载, 如果航行控制器同意抛载或无响应, 则在延时5 s后执行抛载自救流程。
3.2 深度超深故障智能识别
深度传感器通过图6中的V0接入, 经运算放大器IC2阻抗变换和幅值调理后, 送入比较器IC3-1进行幅度比较, 当深度信号V0正常时, 比较器IC3-1的3脚电平低于2脚电平, 则输出端1脚为低电平, 后级电路维持常态; 当深度信号V0超过设定值, IC3-1的3脚电平高于2脚电平, 输出端1脚将输出高电平, 该信号送入优先识别电路IC5和延时比较电路IC4组成的故障优先识别电路。
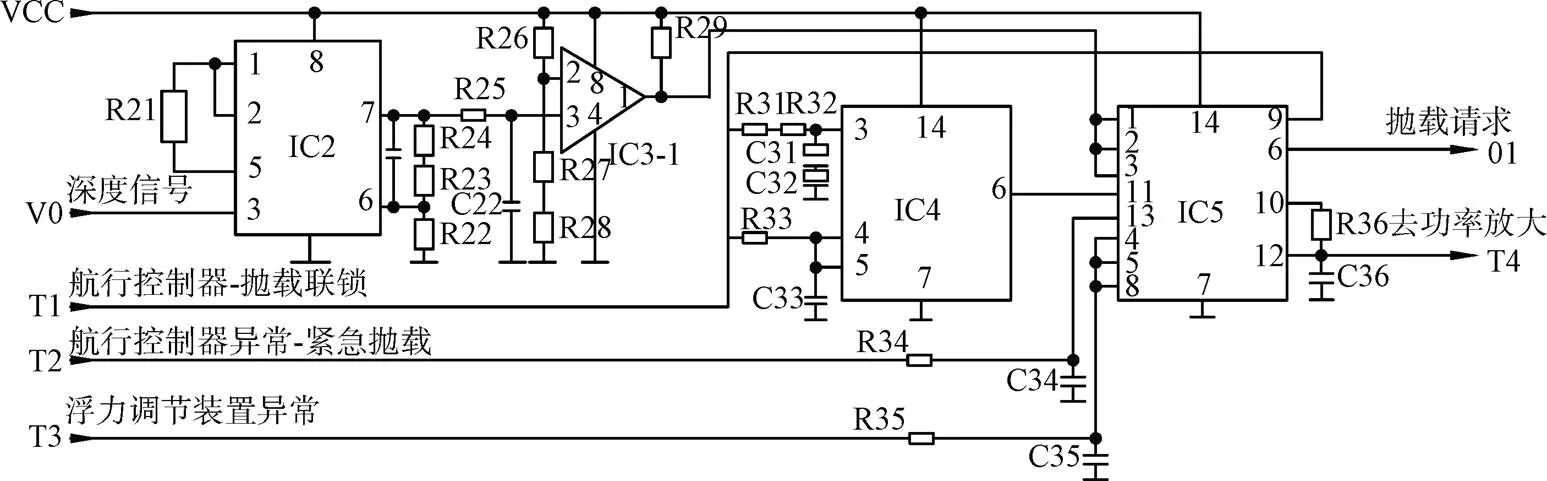
图6 信号调理和检测电路图
3.3 控制器和浮力调节装置故障智能识别
航行控制器联锁信号通过图6中T1接口输入, 当信号T1为高电平或高阻时代表允许执行抛载自救流程, 当信号T1为低电平时代表不允许执行抛载自救流程。
航行控制器故障信号通过T2接口输入, 浮力调节装置故障通过T3接口输入。T2和T3有2种状态: 晶体管逻辑门(transistor-transistor logic gate, TTL)电平和集电极开路信号, TTL高电平和集电极开路的高电阻状态均表示需要启动应急抛载保护的故障状态。
当航行控制器或浮力调节装置发生故障, T2或T3端口为高电平, 经R34和C34以及R35和C35组成的阻容滤波后送入故障优先识别电路进行故障优先级识别和判断; 当航行控制器或浮力调节装置发生断电, 则T2或T3端口为高电阻, IC4和IC5组成的故障优先识别电路也判定其为故障状态。
3.4 应急控制优先级
系统仅在出现严重故障问题时工作, 为了防止如深度传感器深度信号输出有跳点等现象导致不必要的自救流程触发, 该系统设置故障优先权联锁机制, 就是将应急控制分为2个优先级, 即:一级故障和二级故障。一级故障一旦发生, 系统将立即无条件执行应急安全控制自救流程。二级故障发生后, 系统将先向航行控制器发送请求执行抛载信号, 如果航行控制器工作正常, 且判断为不需要紧急抛载, 则需在5 s内将抛载联锁信号T1由高电平置为低电平, 系统不执行抛载自救流程; 如果航行控制器在5 s内无响应, 系统将默认为准许抛载, 则执行上浮自救流程。
航行控制器故障信息T2属于一级故障信息, 深度超深信号V0和浮力调节装置故障信息T3属于二级故障信息。
当出现故障信息如深度连续超深时, IC5的第1、2、3脚为高电平, 经优先识别电路识别后, 从IC5的6脚和9脚同时输出高电平信号, 6脚信号为抛载请求信号01, 送入航行控制器, 如果航行控制器10 s内无响应, 则执行抛载自救流程, IC5的9脚信号通过R31、R32、C31和C32送入IC4进行延时比较, 该信号受T1信号联锁, 当T1信号为高电平或高阻时, IC4的6脚输出高电平送入IC5的11脚进行逻辑判断并自锁, 同时从IC5的12脚输出抛载信号T4, 送入驱动模块进行应急供电, 电磁铁消磁抛掉载荷, 最终完成上浮自救。
4 电磁铁特性及设计应用
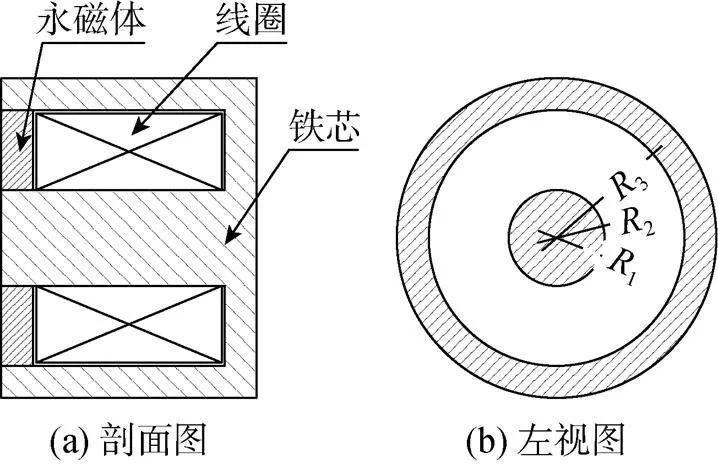
图7 电磁铁结构图
UUV正常工作时, 线圈断电, 抛载翼在永磁体强磁场的作用下被牢牢吸住; 当UUV工作异常时, 线圈上电, 产生与永磁体磁极相反的磁场, 电磁铁消磁, 在弹簧力作用下, 抛载翼弹出脱落。这种方式电路结构简单, 可采用模块化封装, 具有功耗低、可靠性高的特点; 另外, 电磁铁可直接与水环境接触, 无须耐压封装, 不受耐压深度的限制, 可以做成流线型结构, 从而确保了应急安全装置具有体积小, 质量轻, 阻力小等优点, 特别适用于在UUV上安装使用。
4.1 电磁铁特性
为了保证系统可靠性, 通过线圈产生与永磁体磁场强度基本相同的反向磁场是该系统设计的关键。
磁场能量密度函数[11]为


根据能量守恒, 减少的磁场能量转变成抛载翼的机械能, 满足
则磁场吸力为
对于电磁铁直流线圈, 磁通量满足

根据高斯磁场定律[12], 通过铁芯极化的磁通量满足
根据磁路欧姆定律, 气隙磁导满足
由式(5)~(8)可得, 直流线圈对抛载翼的吸力满足
4.2 应用实例

5 试验验证
该系统设计集成在“海翔”系列水下滑翔机上, 该系列水下滑翔机深度检测采用冗余设计, 搭载了2个不同型号的深度传感器, 其应急安全控制模式是当其中任意一个深度传感器输出的深度值连续10 s超过设定的安全值时, 即执行应急安全抛载动作。2016年, 该水下滑翔机在千岛湖开展了湖上测试(见图8), 滑翔机下潜转上浮深度设置为30 m, 应急安全触发深度为50 m。

图8 集成有应急安全系统的水下滑翔机湖上试验
某航次中, 在水下滑翔机上浮时触发了应急控制保护功能, 2个深度传感器深度信号曲线见图9。如图所示, 在水下滑翔机初始下潜过程中深度传感器1与深度传感器2的信号输出正常且基本一致, 在水下滑翔机由下潜转换至上浮状态过程中, 深度传感器1发生故障, 其深度信号开始出现异常, 信号值变大并不断波动, 在横轴420 s处深度传感器1的信号值开始连续超过设定的50 m应急触发深度, 在435 s时工作深度约22 m处执行了应急抛载保护动作, 水下滑翔机将垂直稳定翼抛弃后上浮, 最终完成了安全回收。此动作流程与事先设定的系统深度超差故障应急控制保护流程完全一致, 即深度值连续10 s超过设定的安全值时申请抛载自救, 在延时5 s后执行抛载自救流程, 验证了系统工作可靠性。
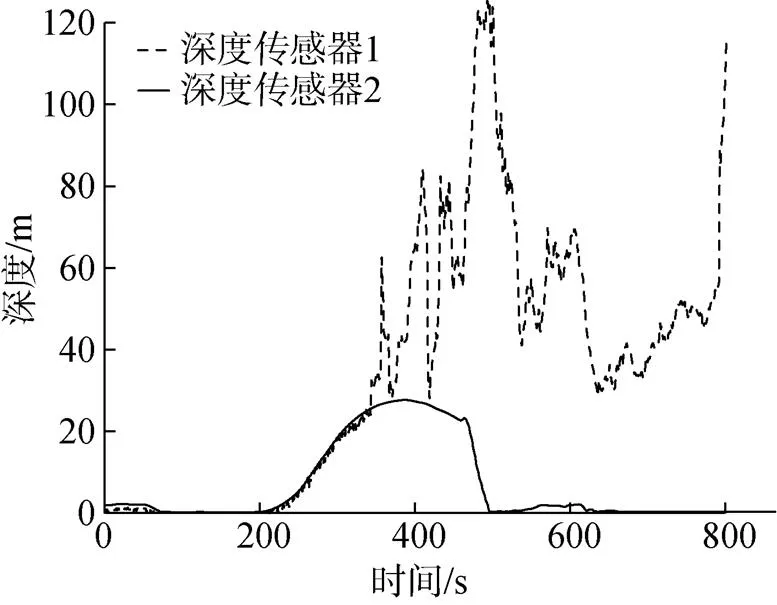
图9 湖试中水下滑翔机深度传感器信号曲线
6 结束语
针对目前中小型UUV应急自救控制技术的不足, 介绍了一种采用电磁耦合的应急安全自救系统, 完成了系统集成并通过了试验验证, 这种智能应急安全自救技术对于提高中小型UUV在复杂海洋环境中的安全性具有较高的实用价值, 其技术特点如下。
1) 该系统将UUV的稳定翼等作为抛载载荷, 应急上浮自救时将其抛掉, 不用增加额外负载作为抛载模块, 同时利用电磁铁的吸附力和弹簧弹力做功, 两者均可直接与水环境接触, 无须耐压封装。同时电磁铁的安装外壳不受耐压深度的限制, 可以做成流线型结构, 从而确保其具有体积小、质量轻、阻力小等优点, 特别适用于在UUV上安装使用。
2) 该系统自成独立体系, 电路结构简单, 采用模块化封装, 功耗低, 可靠性高。其平时处于休眠状态, 长期工作电路采用低压供电, 通过小电流维持工作, 所有耗电器件选用低功耗器件, 确保在待机状态下功耗不大于2.5 mW, 一旦接收到故障信息, 则判断故障信息的优先级别, 通过预设的触发机制决定是否紧急抛载自救, 触发工作状态功耗不大于70 mW, 从而实现低功耗。
该系统在设计过程中需要注意的关键点是,电磁铁线圈与永磁体反向消磁匹配性设计。同时, 需要进一步开展该系统稳定翼抛载分离时的摩擦阻力、水流阻力与弹簧力匹配性设计的相关理论研究, 为系统弹簧力的优化选取提供理论依据。
[1] Dhanak M R, Xiros N I. Springer Handbook of Ocean Engineering[M]. New York: Springer International Publishing, 2016.
[2] Yang H, Ma J. Effects of Thermocline on the Performance of Underwater Glider’s Power System Propelled by Ocean Thermal Energy[J]. Frontiers of Energy and Power Engineering in China, 2009, 3(4):472-479.
[3] 宋保维, 邵成, 李家旺, 等. 自主式水下航行器载荷水下浮力解脱方法[J]. 兵工学报, 2007, 28(2): 249-252.Song Bao-wei, Shao Cheng, Li Jia-Wang, et al. A New Method of Load Separation from Autonomous Underwater Vehicle[J]. Acta ArmamentarII, 2007, 28(2): 249-252.
[4] 周隆英. 水下航行体应急控制系统设计与实现[J]. 微处理机, 2015(5): 72-75.Zhou Long-ying. Design and Implementation of Underwater Bodies Emergency Control Systems[J]. Microproc- essors, 2015(5): 72-75.
[5] Xu G, Duan G. Fuzzy Expert System of AUV Selfrescue[J]. Ship Building of China, 2004(12): 271-275.
[6] Tang R Q, Cao Z Y, Zhang X X. The Emergency Jettison System of AUV “Explorer”[J]. The Ocean Engineering, 2001(2): 85-87.
[7] 高波, 汤国伟. 深海载人潜水器可弃压载与应急抛载系统研究[J]. 中国制造业信息化, 2006, 35(23): 82-84.Gao Bo, Tang Guo-wei. The Research of Droppable Ballast and Emergency Ejection System In Human Occupied Vehicle[J]. Manufacturing Information Engineering of China, 2006, 35(23): 82-84.
[8] 闫利伟, 黄金红, 房修义, 等. 某小型爆炸螺栓设计[J].火工品, 2014(4): 9-11.Yan Li-wei, Huang Jin-hong, Fang Xiu-yi, et al. Design on A Small Explosive Bolt[J]. Initiators & Pyrotechnics, 2014(4): 9-11.
[9] 丁玉红. 一种小型直流电磁铁的结构设计[J]. 机电元件, 2008, 28(4): 34-36.Ding Yu-hong. Structural Design of a Small D.C. Electr- omagnet[J]. Electromechanical Components, 2008, 28(4): 34-36.
[10] 郑阳, 李智航, 张宗健, 等. 基于吸盘式脉冲电磁铁的EMAT实验研究[J]. 传感技术学报, 2018, 31(6): 880- 886.Zheng Yang, Li Zhi-hang, Zhang Zong-jian, et al. Electromagnetic Acoustic Transducer with Sucker Type Pulsed Electromagnet[J]. Chinese Journal of Sensors and Actuators, 2018, 31(6): 880-886.
[11] 黄晓凡, 田忠涛, 梁海彤. 带弹簧负载的电磁铁动态特性仿真与实验研究[J]. 机电工程, 2017, 34(9): 1024- 1027.Huang Xiao-fan, Tian Zhong-tao, Liang Hai-tong. Dynamic Characteristics Simulation and Experiment of Solenoid with Spring Load[J]. Mechanical & Electrical Engineering Magazine, 2017, 34(9): 1024-1027.
[12] 王淑红, 肖旭亮, 熊光煜. 直流恒力电磁铁特性[J]. 机械工程学报, 2008, 44(2): 244-247.Wang Shu-hong, Xiao Xu-liang, Xiong Guang-yu. Direct Current Electromagnets with Constant Traction Characteristic[J]. Chinese Journal of Mechanical Engineering, 2008, 44(2): 244-247.
Design of an Intelligent Emergency Safety Control Self-rescue System for UUV
ZHANG An-tong, XU Ling-ling, WANG Jian, XIAO Dong-lin, ZHANG Bo
(China Ship Scientific Research Center, Wuxi 214082, China)
In view of the fact that unmanned undersea vehicle(UUV) navigation operations face serious security problems, this paper puts forward an intelligent emergency safety control self-rescue system. This system adopts the operation mode of electromagnetic coupling. Its basic principle is to generate a reverse magnetic field with the same strength as the permanent magnet through a direct current(DC) coil so as to offset the electromagnetic force, then the load can be removed via spring force. The design method of the electromagnet is given by analyzing the corresponding relationship between the coil electromagnetic force and other parameters such as coil turns. The unidirectional slope disturbance structure is set in the chute, and the fault priority interlock is used in the control mechanism to realize low power consumption and high reliability of the system. Lake trial shows that the system is applicable for improving the safety of UUV.
unmanned undersea vehicle(UUV); safety; electromagnetic coupling; self-rescue system
TJ630.2; TP273.5
A
2096-3920(2019)05-0548-07
10.11993/j.issn.2096-3920.2019.05.010
张安通, 徐令令, 王健, 等. 一种UUV智能应急安全控制自救系统设计[J]. 水下无人系统学报, 2019, 27(5): 548-554.
2019-01-21;
2019-04-16.
海洋公益性行业科研专项经费项目资助(201205035).
张安通(1987-), 男, 硕士, 工程师, 主要从事水下无人系统总体及结构性能技术研究.
(责任编辑: 杨力军)
猜你喜欢
小猕猴智力画刊(2022年10期)2022-11-02
机床与液压(2022年11期)2022-09-15
疯狂英语·新读写(2021年6期)2021-08-05
防爆电机(2021年2期)2021-06-09
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
科技传播(2019年15期)2019-08-22
创新作文(1-2年级)(2017年7期)2017-12-26
电子技术与软件工程(2017年10期)2017-06-02
电子技术与软件工程(2017年2期)2017-03-15