
基于功率激光修剪绿化带的自动绿篱机设计
2019-11-06 00:41王馨梅王成城杨天阳牛仁杰仝慧紫
西安理工大学学报 2019年3期
王馨梅,谢 冰,焦 欣,王成城,杨天阳,任 哲,牛仁杰,仝慧紫
(西安理工大学 自动化与信息工程学院,陕西 西安 710048)
随着绿色宜居理念的倡导,灌木型绿化带面积日益增大,其修剪方式也在不断改进。传统绿篱机使用电动机械刀具,在修剪过程中会带来严重的噪音污染,特别不适用于学校、医院、养老院等安静场所。此外,绿化带内植株品种单一,个别植株发生的病虫害(例如褐斑病、锈病、红蜘蛛、蚜虫等)极易随机械刀具大面积扩散蔓延,而在繁忙的马路、学校和医院等场所喷洒农药不利于广大人群的健康。
激光切割不但噪声低,而且红外波段强激光切割出的枝叶伤口会被瞬间高温碳化,形成针对细菌、病毒、害虫入侵的保护层。因此近年来,国内外开始尝试用激光修剪农作物。Schou等[1]用功率激光切割掉植物的上半部分枝茎后测量植株生长量,并与机械切割后的生长量做对比实验,证明了用10.6 μm波长激光束聚焦切割植物枝茎不会影响植物继续生长。Shah等[2]提出了一种新的清除杂草的方法,用车载摄像机检测杂草并用激光器精准摧毁。Daniel等[3]设计了一种卷轴结构的激光割草机并申请了美国专利,但只能用于草本植物,不适用于灌木型绿化带。
近年来,激光技术飞速发展,2012年我国首台1 kW工业光纤激光器研制成功,2016年我国功率达到120 kW的工业级光纤激光器研制成功[4],2017年中国工程物理研究院激光聚变研究中心实现百太瓦级超短超强脉冲激光关键技术突破,建成了国内首台输出能力高达200TW的SILEX-I超短超强脉冲激光装置[5]。总之,当前普通高功率激光源的制造成本、维护成本以及体积重量值均正在快速下降,将激光修剪技术应用于农林业等领域已经初步具备商业化开发条件。
激光束作为一种切割工具,不但工作噪声低、不扰民,而且无法将染病植物浆液(含细菌、真菌、病毒、虫卵等)沾染到其它植株上,因此不会成为病原体的传播媒介。有报道称用小功率二氧化碳激光器或红宝石激光器照射,可杀死藏在植物中的卵和幼虫以及螨、蚊等体型小的成虫[6]。此外,激光切割使植物伤口表面碳化,形成一层天然的保护膜,能够有效地阻挡病毒细菌从切割伤口入侵植物体。因此,本文提出一种基于功率激光束修剪绿化带的新型绿篱机设计思想,首先基于实验论证何种激光器更适合作为该绿篱机激光源,然后进行该绿篱机系统的修剪、自动避障和降温除尘等方案设计。
1 激光切割实验
CO2激光器,其主要工作物质是由对人体无毒的二氧化碳、氮气和氦气三种气体组成。一般情况下,工作气体密封存储于硬质玻璃制成的激光管最外层中,冷却水通过激光管的中间层降温,最内一层为放电管。目前它是厚板切割商业化最好的一种激光器,其波长为10.6 μm,位于远红外波段。考虑到CO2激光器成本低、发射功率大、维护简单,植物对10.6 μm波长的激光吸收率高,且有报道称10.6 μm杂散余光相比于1 064 nm对植物再生影响小[1],因此初步选择二氧化碳激光器作为激光绿篱机的光源。为了验证CO2激光器切割灌木的效果,特别是观察伤口碳化效果,选择小叶黄杨、金叶女贞和卫矛(其形貌如图1所示)进行切割实验。

图1 三种植物实验样本的照片
小叶黄杨是黄杨科黄杨属,分布于中国安徽、浙江、福建、江西、湖南、湖北、四川、广东、广西等省区;金叶女贞是木犀科女贞属,分布于中国华北南部、华东、华南等地区;卫矛是卫矛科卫矛属,除东北、新疆、青海、西藏、广东及海南以外均有分布。因此,这三种植物能够称作我国绿化带的代表性灌木品种。假设绿化带第一次用电动刀具修剪平整,其后快生长季节每两至三周用激光绿篱机修剪一次,慢生长季节每四至六周用激光绿篱机修剪一次,则激光绿篱机不需要面对修剪较粗枝条的情境,因此本文取这三种绿化带植物的新鲜小枝条进行切割测试。使用最大平均功率800 W的CO2激光器进行切割实验,参数如表1所示。

表1 三种常见绿化带灌木的CO2激光切割实验数据
因为实验中所用CO2激光器的高斯激光束腰瑞利长度很短,所以在切割直径4 mm的小叶黄杨杆时,为了实现快速切割而使用了较高的输出功率(640 W)。今后可用衍射光学元件或菲涅耳透镜相位采样组合增大焦深[7-9],从而提高切割效能。该CO2激光器的实验结果表明,枝条和叶片切割面略有碳化(见图2和图3(a)),且切割过程中烟尘现象不明显。

图2 用10.6 μm波长激光切割小叶黄杨木质茎的碳化效果
为了对比效果,还分别用普通钢质刀片、波长1 064 nm的掺钕钇铝石榴石(neodymium-doped yttrium-aluminum garnet,Nd:YAG)红外激光器、波长355 nm的光纤紫外激光器对小叶黄杨叶片进行切割,结果分别如图3(b)、(c)和(d)所示,普通钢质刀片和紫外激光对应的切口完全无碳化,而用1 064 nm红外激光可获得与用10.6 μm远红外激光相似的切口碳化效果。但是考虑到1 064 nm红外激光比10.6 μm远红外激光波长短一个数量级,因此在枝条中吸收深度浅,会导致切割速度相对较慢,并且考虑到1 064 nm激光辐射有碍植物再生长速度[1],所以在本绿篱机方案中优选10.6 μm远红外激光。
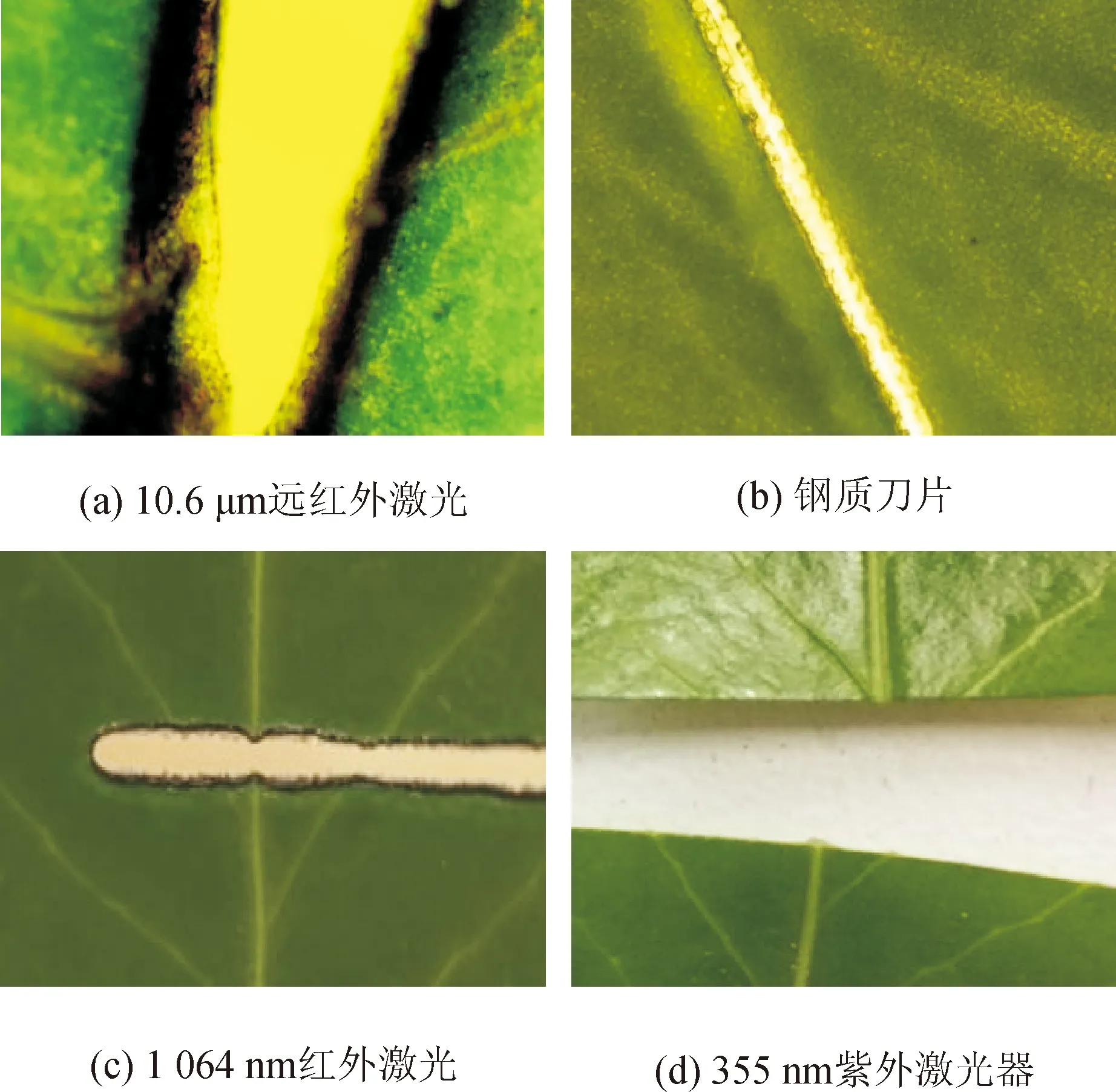
图3 四种切割方式的叶片切口效果对比
2 系统设计
本绿篱机为一个车载系统,主要由激光源、振镜光路系统、智能避障控制系统、降温降尘水路系统等部分组成。基本功能如图4所示。
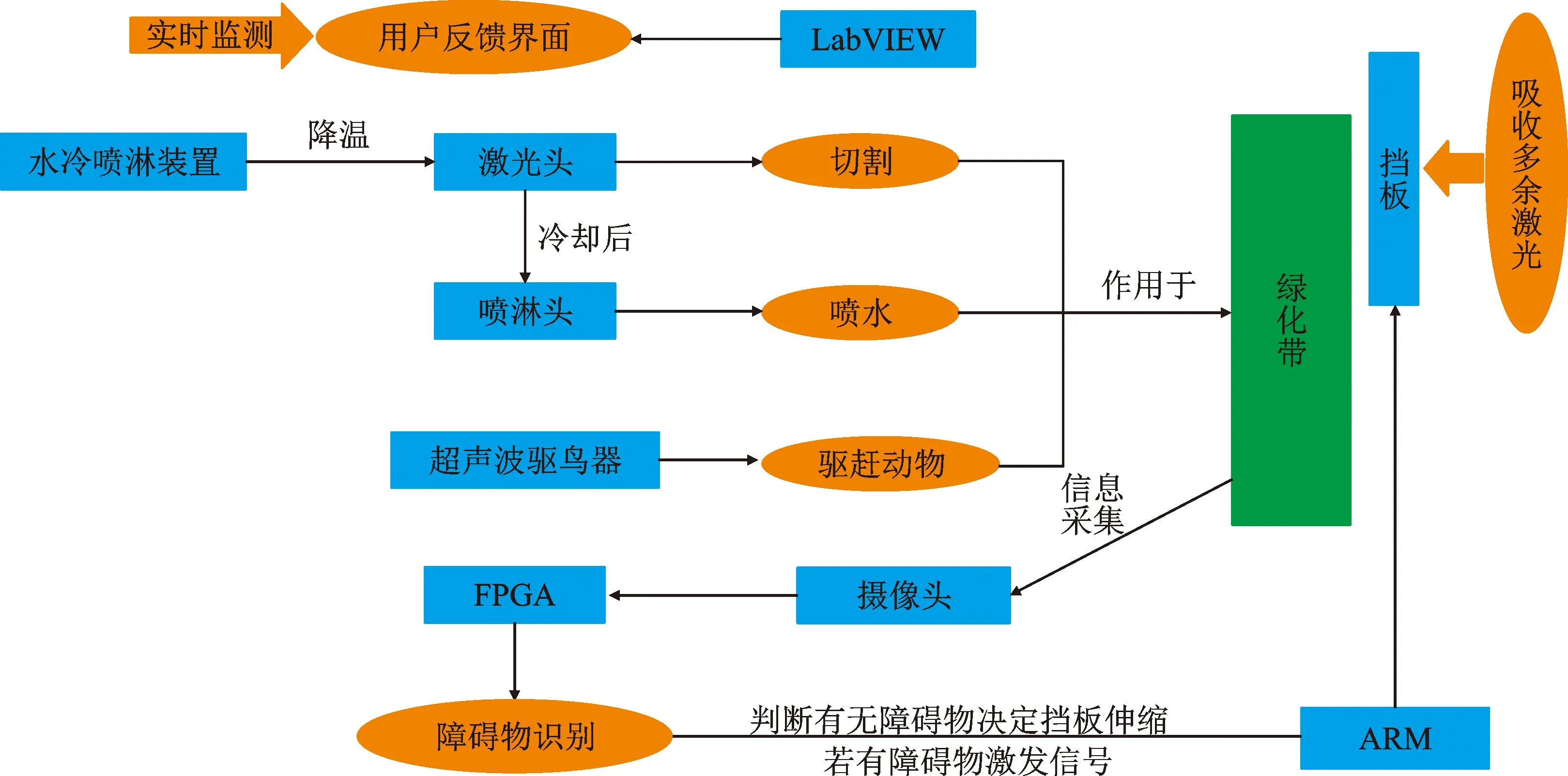
图4 激光绿篱机系统功能说明图
整体视觉效果如图5所示,车顶是一个网格型太阳能电池板,既能遮挡阳光延缓内部系统老化,也能将太阳能转变为电能,驱动风扇为内部系统降温。系统的工作流程是:首先将承载绿篱机系统的环卫工程车开到紧邻待修剪绿化带的左侧,展开伸缩杆,使余光吸收板位于绿化带右侧外边缘,将激光头高度通过升降电机调整到合适的修剪高度;然后在车沿着绿化带缓慢行驶的过程中,激光通过振镜光路系统修剪绿化带;同时,车外摄像头传输修剪视频给系统用户界面,便于司机在驾驶室内了解当前修剪实况。下位机采用ARM微处理器,上位机用户界面基于LabVIEW平台开发,图像识别基于现场可编程门阵列(field-programmable gate array,FPGA)实现。

图5 激光绿篱机系统的车载示意图
2.1 振镜光路系统
从激光器出射的高斯光,经一个六倍率的硒化锌(ZnSe)扩束镜扩束后,近似为一束平行光,经过一个固定全反镜和一个可旋转全反镜(本文称之为一维振镜,其工作原理参见激光雕刻机中的二维振镜系统[4])转光路方向后经14 cm直径凸透镜(也称场镜)聚焦,如图6所示。每种灌木因含水率、反光率、韧皮部厚度、木质部厚度等参数的不同而有不同的切割能量密度最小阈值。设距激光焦点L处的光能密度,恰好等于切割所需的光能密度阈值,则该激光可视作一把长为2L的“光刀”,在工程车前进运动以及图6所示电动平移台和振镜电机运动的共同作用下,该光刀切割轨迹可遍历整个绿化带。

图6 激光焦点扫描控制示意图
2.2 智能避障控制系统
由于激光系统工作噪声低,所以需要安装定向超声波驱鸟器驱逐绿化带中休憩的鸟类和松鼠等小动物。此外,绿化带中通常耸立电线杆、路牌或树木等障碍物,为此通过摄像头动态采集图像数据并进行模式识别[10-11]。发现障碍物后,启动避障操作,即振镜、场镜所在的电动平移台向车内收回一段距离,余光吸收板先上抬10 cm再向车内收回一段距离,待绕开障碍物之后再伸出。具体控制方案已经样机验证,电路各模块关系如图7所示。

图7 激光绿篱机的数据传输与智能控制模块图
FPGA持续对采集的图像进行处理并将路况信息传递给ARM,ARM会持续更新各个模块的工作状态并将信息输入到上位机用户图形界面上供司机查看。当FPGA检测到有障碍物出现且伸缩杆与障碍物接近到预定距离时,就传送一个信号给ARM,ARM接收到信号后,立即控制伸缩杆缩回,避开障碍物。此过程中,FPGA对障碍物持续监测,当修剪系统离开障碍物后,将信息反馈给ARM,使ARM控制伸缩杆伸出,继续工作。在行进过程中,各模块仍将持续自检,当出现问题时(比如水箱水位过低、摄像头采集不到图像、伸缩杆无法正常伸缩等),ARM立即反馈给上位机,绿篱机急停且用户界面出现错误提示。
图像高速采集是基于同步动态随机存取内存(synchronous dynamic random-access memory,SDRAM)和两个先进先出芯片(first input first output,FIFO)硬件实现的,其中SDRAM为FPGA的片外板载资源,FIFO为FPGA内部的IP核调用所生成的资源[12]。图像采集采用双FIFO的乒乓算法[12],目的是为了降低图像显示延迟,提高图像切换速度。SDRAM控制器按照图像的帧数对指定FIFO进行刷新和重装载,采集到的数据一路经过薄膜晶体管控制器直接传送到显示屏界面,另一路送往图像处理单元。
图像处理单元首先对采集到的数据进行平滑滤波,目的是滤除由于背景所带来的一些不必要的噪声,然后根据像素的R、G、B分量的差异变化提取出绿化带对象(绿色为主的部分),并将绿化带整体以外的部分进行剔除,再通过Sobel算子对剔除后的图像进行边界的提取,得到当前绿化带的大致轮廓,最终依据边界曲线的线性、平滑与否进行障碍物判定。若所提取的边界曲线为连续线性则说明无障碍物;若存在边界的跳跃则说明存在障碍物,再根据取景的宽度和跳变点的关系换算出障碍物的位置,同时产生触发信号,通过总线传递到ARM进行后续的控制。其中,模式识别的训练采用的是聚类思想,先将无障碍物的绿化带和有障碍物的绿化带的图像进行特征提取与抽象,从而得到每类情况下的特征,将此特征进行记录并作为后续识别的判断依据。
2.3 水路系统
储水箱作为本车载系统最大的负载,综合用水可有效减轻系统载荷。因此,将CO2激光器散热系统设计为由内外两层组成:内层是一个小型低功耗的去离子水密闭循环系统,接CO2激光管中间层;外层是一个开放式的水箱,用于给内层水冷系统降温。储水箱里的水被水泵驱动经滤网过滤后,首先进入激光器外水冷箱,带走激光器工作热量,然后喷淋在刚被激光修剪过的绿化带处,沉降激光烧灼产生的烟尘,并且给植物补充生长用水,从而实现“一水三用”的效果。
3 结 语
本文提出一种基于功率激光器实现激光修剪灌木型绿化带的车载系统,并实验论证了该系统采用二氧化碳功率激光器的合理性。这种激光修剪方法可以实现低工作噪声,同时能使植物伤口碳化,失去生物活性,有效防止病虫害借修剪操作而蔓延。在样机上设计并实现了能提高激光焦点扫描线速度的光路方案、基于FPGA图像模式识别的自动避障方案以及冷却降尘浇灌综合利用的水路方案。随着居民对安静无污染的绿色生活环境的需求增长,这种基于激光修剪绿化带的方法会具有越来越高的商业化开发价值。
猜你喜欢
廉政瞭望·下半月(2022年5期)2022-06-11
落叶果树(2021年6期)2021-02-12
河北省科学院学报(2020年4期)2020-03-19
科学(2020年6期)2020-02-06
诗潮(2019年6期)2019-07-03
东坡赤壁诗词(2019年1期)2019-04-30
电子制作(2018年9期)2018-08-04
安徽文学(2018年6期)2018-06-08
今古传奇·故事版(2016年24期)2017-02-07
现代园艺(2017年14期)2017-02-05
