垂直起降固定翼无人机的翼尖垂尾设计分析
2019-11-04 08:59张飞王云孙一方谭锟
航空工程进展 2019年5期
张飞,王云,孙一方,谭锟
(南昌航空大学 飞行器工程学院,南昌 330063)
0 引 言
垂直起降固定翼无人机兼具固定翼飞机速度快、航程远和多旋翼无人机垂直起降、可悬停作业的优点,大幅扩展了无人机的应用范围。国外从20世纪60 年代就开始有垂直起降方面的研究,但多为研究垂直起降总体方案类[1]。国内对垂直起降类无人机的研究也多为总体设计和控制策略类[2-5],而对垂直起降无人机翼尖设计类的研究[6-8]较少。垂直起降固定翼无人机为一种较为特殊的机型,传统的翼尖设计并不能完全适用于该类无人机。
翼尖小翼能够降低无人机巡航状态的阻力[9]。常用的翼尖小翼主要有融合式翼梢小翼、涡扩散器、翼尖延伸以及“双叉弯刀”等多种构型[10]。因为垂直起降固定翼无人机具有独特的飞行模式,所以其翼尖小翼设计方式比较灵活。
结合垂直起降固定翼无人机独特的飞行模式,本文提出四种翼尖垂尾的设计:翼尖下垂尾、翼尖上垂尾、翼梢端板、无翼尖垂尾的常规布局设计。为了解四种翼尖垂尾构型对中小型无人机总体性能的影响,本文结合某型垂直起降固定翼无人机工程设计案例对上述四种翼尖垂尾进行详细对比分析,确定适合该无人机的最优方案,同时可为类似无人机翼尖结构设计提供参考借鉴。
1 某型垂直起降固定翼无人机总体及翼尖垂尾结构
某型垂直起降固定翼无人机工程样机如图1所示,该无人机主要几何尺寸如表1所示。

图1 某型垂直起降固定翼无人机工程样机Fig.1 An engineering prototype of a vertical take-off and landing fixed-wing UAV
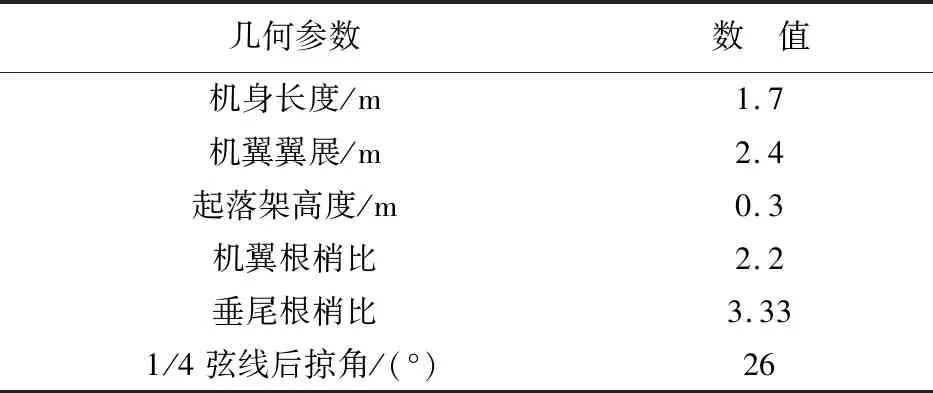
几何参数数 值机身长度/m1.7机翼翼展/m2.4起落架高度/m0.3机翼根梢比2.2垂尾根梢比3.331/4弦线后掠角/(°)26
此无人机的垂直起降方案为主旋翼加三辅助涵道。主旋翼位于机身中部,三辅助涵道分别位于机头和两侧机翼处。主旋翼动力作为垂直起降状态和平飞状态时的主要动力。在垂直起降状态时,主旋翼动力用来克服重力;在平飞状态时,主旋翼动力倾转90°,用以克服平飞时无人机的阻力。三辅助涵道主要用来控制无人机在垂直起降状态时的机身平衡,在平飞状态时,不使用三辅助涵道。
拟采用的翼尖垂尾结构可选方案有:下垂尾、上垂尾、翼梢端板和常规布局四种型式,如图2所示。

(a) 下垂尾 (b) 上垂尾

(c) 翼梢端板 (b) 常规布局
图2 四种翼尖设计
Fig.2 Four kinds of wing tip design
其中,下垂尾、上垂尾和常规布局模型的垂尾高度为0.3 m,垂尾面积和垂尾尺寸完全相同;翼梢端板模型的垂尾面积为其他三种模型的1.5倍。下垂尾和翼梢端板在作为垂尾使用的同时可充当起落架使用,故机身后部无需设置额外的起落架;上垂尾和常规布局的垂尾被设置在机身上方,故机身下方必须设置两根额外的后起落架。
2 求解方法和边界条件
通过众多飞行实践可知,当来流马赫数Ma≤0.3时,空气压缩程度很小,可以忽略空气的可压缩性,将空气当作不可压流;当Ma>0.3时,则需要考虑空气的可压缩性[11]。由于本文模型流速并未超过Ma=0.3的临界值,采用理想不可压缩气体模型。同时为了便于计算,假设流动是定常且稳定的[12]。
本文所采用的几何模型如图2所示,计算采用的湍流模型为壁面自适应局部涡粘大涡模拟模型,算法为格子-玻尔兹曼(LBM-LES)算法[13]。采用LBM-LES方法的粒子分布网格如图3所示,网格密的区域表示粒子的尺度小。根据每一个时间步计算得到涡量,然后对粒子分布进行自适应动态加密(图3(b)),这样可在提高计算精度的同时没有过大地增加计算量。本文算例边界条件为:-x为速度入口边界条件,其余均为周期性边界条件。
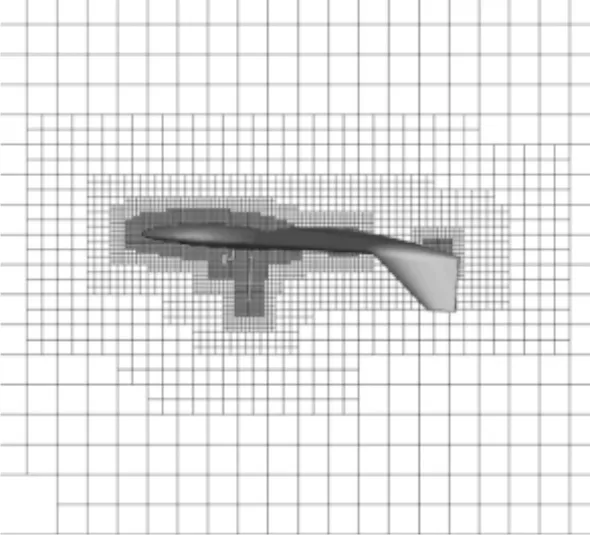
(a) 局部粒子分布

(b) 自适应后粒子分布图3 LBM-LES方法的粒子分布Fig.3 Particle distribution of LBM-LES method
3 四种翼尖垂尾设计性能分析
3.1 计算方法的验证
为了保证本文计算方法的可靠性,对无人机气动模型[14]计算其不同迎角下的升力值,并将计算结果与其实验数据进行对比。计算结果如图4所示。
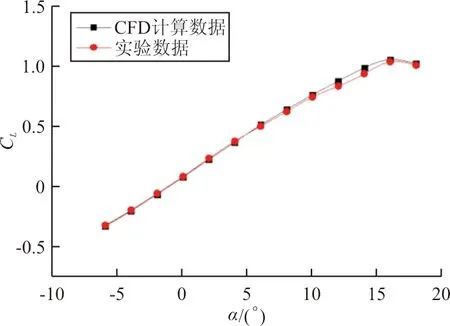
图4 计算数据与实验数据对比Fig.4 Comparison of the calculation data and experimental data
从图4可以看出:计算数据与实验数据结果吻合度良好,数据上存在的一些细微差别,主要是在仿真和试验条件下,由密度或粘性系数略有不同导致的,表明该计算方法正确可靠,可用于该无人机物理模型的气动特性研究。
3.2 平飞状态气动模拟数据对比
对此无人机在平飞状态下的气动模拟共计算来流速度为20 m/s,迎角α分别为-4°、-2°、0°、2°、4°、6°、8°、10°、12°、14°、16°的算例。其中,两副主旋翼呈共轴反桨状态,输出推力水平向后,转速皆为3 000 r/min。四种翼尖设计的升力系数(CL)、阻力系数(CD)以及升阻比(CL/CD)随迎角(α)的变化曲线如图5所示。

(a) 升力系数随迎角的变化曲线

(b) 阻力系数随迎角的变化曲线
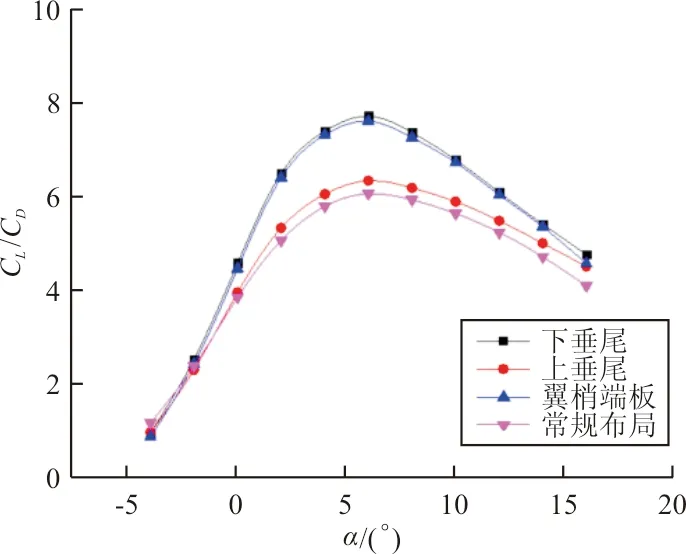
(c) 升阻比随迎角的变化曲线图5 四种翼尖设计的升阻力系数及升阻比Fig.5 Lift and drag coefficients and lift-drag ratio for four kinds of wingtip design
从图5可以看出:在四种翼尖设计中,上垂尾设计的升力系数较大,常规布局设计的升力系数最小,但总体来说四种设计的升力系数差别不大,且四种翼尖设计在4°~6°迎角区间内飞行效率较高;下垂尾和翼梢端板在作为垂尾使用的同时还充当了起落架的作用,相比于上垂尾设计和常规布局设计少了两根额外的后起落架,因此下垂尾设计和翼梢端板设计的阻力系数较小,从而导致下垂尾设计和翼梢端板设计的升阻比相对较大。
3.3 平飞状态三维流场对比
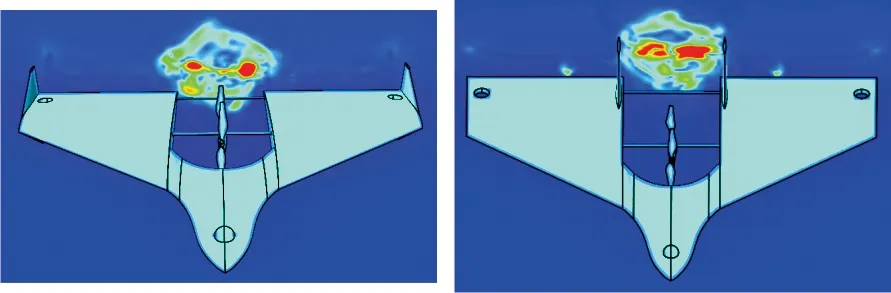
无人机在巡航状态会产生一定的翼尖涡流和湍流。翼尖涡流的强度直接关系到无人机诱导阻力的大小[15],无人机巡航产生的湍流也会增大其阻力,因此有必要降低无人机在巡航状态时的翼尖涡流强度和湍流强度。四种翼尖设计在20 m/s来流4°迎角下的涡量云图如图6所示,湍流强度云图如图7所示。

(a) 下垂尾 (b) 上垂尾

(c) 翼梢端板 (b) 常规布局
图6 平飞状态四种翼尖设计涡量云图对比
Fig.6 Comparison of vorticity nephogram of four wingtip designs in level flight status

(a) 下垂尾 (b) 上垂尾
(c) 翼梢端板 (b) 常规布局
图7 平飞状态四种翼尖设计湍流强度云图对比
Fig.7 Comparison of turbulence intensity nephogram of four wingtip designs in level flight status
从图6~图7可以看出:
(1) 对整机阻力影响较大的为机身中部和机翼翼尖处。机身中部产生了大量的湍流和涡流,机翼翼尖处产生了大量的翼尖涡,而机翼翼尖处的湍流则相对很小。
(2) 机翼的翼尖处理起到了明显作用,相比之下,下垂尾设计、上垂尾设计、翼梢端板设计的翼尖涡流较小,但机身中部涡流面积较大;由于常规布局的垂直尾翼设置在机身中部,有效地抑制了机身中部涡流的扩散,常规布局机身中部涡流面积较小,但翼尖涡流强度较大。
(3) 相比于下垂尾设计和翼梢端板设计,上垂尾设计和常规布局设计的机身下方多了两根起落架,因此在两根起落架处产生了明显的涡流和湍流。
3.4 垂直起降状态气动模拟数据对比
当无人机处于垂直起降状态时,对其四种翼尖设计在10 m/s侧风下进行气动模拟,机身侧向倾角分别为0°、4°、8°、12°、16°、20°。其中,两副主旋翼呈共轴反桨状态,输出推力垂直于机翼向下,转速皆为3 500 r/min。四种翼尖设计的侧面阻力Fy及相对于整机重心处的侧面重心力矩Mz如图8所示。

(a) Fy随机身倾角的变化
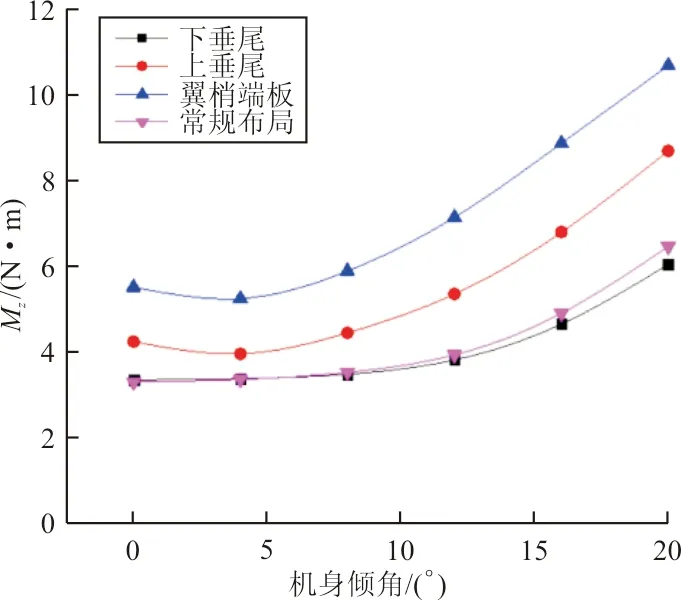
(b) Mz随机身倾角的变化图8 四种翼尖设计的侧面阻力(Fy)及侧面重心力矩(Mz)随机身倾角的变化Fig.8 Variation of side resistance (Fy) and side moment (Mz) accompany with inclination angle of four wingtip designs
从图8可以看出:在相同倾角下侧面风速为10 m/s时,四种翼尖设计中下垂尾设计的侧面阻力和侧面力矩最小,翼梢端板设计的侧面阻力和侧面力矩最大;随着机身倾角增加下垂尾设计的侧面阻力Fy和侧面力矩Mz的增加幅度更小,上垂尾设计和翼梢端板设计的增加幅度更大;较小的侧面阻力和侧面力矩代表着机身更易于控制,因此下垂尾设计更具优势。
3.5 垂直起降状态三维流场对比
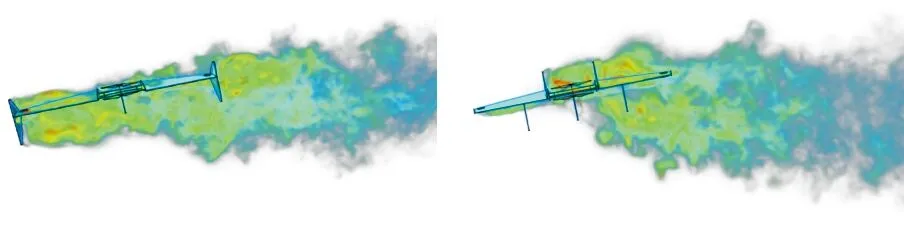
当无人机处于垂直起降状态时,四种翼尖设计在10 m/s侧风下,机身倾角为8°时的湍流强度云图如图9所示,涡量云图如图10所示。

(a) 下垂尾 (b) 上垂尾
(c) 翼梢端板 (b) 常规布局
图9 垂直起降状态四种翼尖设计湍流强度对比
Fig.9 Comparison of turbulence intensity nephogram of four wingtip designs in vertical takeoff and landing status

(a) 下垂尾 (b) 上垂尾

(c) 翼梢端板 (b) 常规布局
图10 垂直起降状态四种翼尖设计涡量云图对比
Fig.10 Comparison of vorticity nephogram of four wingtip designs in vertical takeoff and landing status
从图9~图10可以看出:
(1) 在四种翼尖设计中,上垂尾设计和翼梢端板设计产生的湍流和涡流相对较大,下垂尾设计和常规布局设计产生的湍流和涡流相对较小。
(2) 在垂直起降状态时,当侧面来流干扰机身时,机身需要倾斜一定角度来抗衡机身产生的阻力,且下垂尾设计相对其余三种翼尖设计侧面投影面积最小,故下垂尾设计产生的湍流和涡流也相对较小。且随着机身倾斜角度的增大,下垂尾设计相对其余三种翼尖设计的侧面投影面积越小,因而所造成的机身侧面阻力和侧面力矩也越小。
4 结 论
(1) 在平飞状态时,四种翼尖设计中,下垂尾设计和翼梢端板设计在一定程度上抑制了翼尖涡流,同时兼顾了起落架整流,升阻比较高。
(2) 在垂直起降状态时,四种翼尖设计中,下垂尾设计和常规布局设计的侧面阻力和侧面力矩相对较小。综合平飞状态和垂直起降状态两种工况可以确定:在四种翼尖设计中,下垂尾设计是较为理想的布局设计。
(3) 无人机机身中部主旋翼处的流场比较复杂,有必要对其做进一步的优化设计。
猜你喜欢
核安全(2022年3期)2022-06-29
昆明医科大学学报(2021年12期)2021-12-30
军民两用技术与产品(2021年4期)2021-07-28
舰船电子工程(2021年4期)2021-05-25
英语文摘(2020年10期)2020-11-26
兵器装备工程学报(2020年6期)2020-07-07
作文周刊·小学一年级版(2020年8期)2020-05-11
锦绣·上旬刊(2019年1期)2019-10-21
中学生数理化·高三版(2017年3期)2017-04-21
国外科技新书评介(2014年12期)2015-01-05