
基于像素工厂的近水区域色彩校正模型探讨
2019-10-30 02:27李琼吴克友任杨李甜
城市勘测 2019年5期
李琼,吴克友,任杨,李甜
(武汉市测绘研究院,湖北 武汉 430022)
1 像素工厂简介
近年来,随着城市建设步伐的加快,测绘及计算机软硬件技术的进步促使测绘装备向高精度、集成化、强时效方向发展。法国空客公司研制的像素工厂(Pixel Factory,PF)是一套大型遥感影像生产处理系统,通常具有强大计算能力的若干个计算节点,输入数码影像或者卫星影像,在少量人工干预下,经过一系列自动化处理,输出包括数字表面模型(DSM)、数字高程模型(DEM)、正射影像(DOM)以及真正射影像(TDOM)等产品,并能生成一系列其他中间产品[1]。
像素工厂是基于专有算法的软件,非常适用于处理数码影像[2],尤其适用于数据量TB级的ADS系列推扫式数码影像。ADS80、ADS100推扫式相机由瑞士徕卡公司生产,是世界上先进的航摄系统[3]。城市正射影像,特别是大城市高层建筑非常多,利用框幅式相机(包含胶片相机和面阵CCD机)作业并不尽如人意。突出表现在高层建筑物受透视摄影关系,正射影像上有诸多的建筑物侧面图及摄影死角[5]。相对传统的框幅式影像数据处理,基于像素工厂生产流程,全新的ADS系列推扫式传感器在影像空三加密、DEM编辑、模型镶嵌、正射影像匀色等技术环节有明显优势,本文的基础数据均来源于ADS系列传感器影像数据。
1.1 基于像素工厂的正射影像制作优势
基于像素工厂的正射影像制作优势主要包括三个方面:一是影像空三加密环节,ADS系列传感器集成了高精度机载GPS/IMU系统,利用少量野外控制点即可完成空三加密工作,极大地减少了外业工作量;二是DEM过滤编辑环节采用协同共享方式作业,实现多人多任务同时作业,提高了DEM编辑效率;三是由于ADS采用推扫方式成像,像对数量减少了数十倍,提高了影像镶嵌线编辑效率。
1.2 基于像素工厂的正射影像匀色模型
传统的正射影像匀色模式主要分为两种:一是空三加密结束后,选取色彩均衡的某一张单模型正射影像数据作为模板,借助支持匀光匀色算法的软件对全测区所有影像匀光匀色,再进行下一步工序;二是借助Photoshop软件设置色阶、亮度、对比度等动作,对全测区所有影像直方图修改到合理区间。两种匀色方法对于单一数据处理效果比较好,但是对于水域面积大,湖泊池塘多等地物复杂区域适用性差,后期为了保证全测区颜色,尤其是水域颜色的过渡自然,无拼接痕迹,需要耗费大量时间和人工。
基于像素工厂的匀色模型主要依托像素工厂独有的快视图理念。在像素工厂中,全分辨率原始数据通过9×9重采样可以获取快视图。由于快视图较小,操作更快捷,因此在像素工厂里,对影像颜色的处理都是在快视图上进行,最后把快视图的辐射信息应用到全分辨率影像上,实现整幅影像的色调调整[4]。按照这种“由粗到精”匀色模型可以大幅改善整个测区正射影像质量。但是,某些测区水域面积大,数目较多并分散,而且涉及多个模型,为了保持水域整体匀光匀色一致性,会在Photoshop软件对快试图水域匀色修补处理。此种方式会造成全分辨率正射影像水域边缘及近水建筑物颜色信息损失,色彩失真等问题。传统修正模式是通过人工排查,从数据库中导出未匀色全分辨率数据,利用Photoshop软件逐一修补,十分烦琐。本文针对像素工厂近水区域颜色问题,建立了一套新的色彩校正模型解决方案。
2 样例数据及分析
2.1 测区概述
测区位于武汉市都市发展区范围(如图1所示),采用ADS100航摄仪拍摄,面积约 4 000 km2。测区内长江、汉江交汇、水网交错、房屋及各类建筑密集。既存在高楼林立的区域,如汉口解放大道一带,武昌武珞路沿线,汉阳钟家村片区。同时主城区内遍布大小湖塘,武昌区有东湖、严西湖、南湖等大型湖泊,汉阳区后官湖、南太子湖等大面积水域。
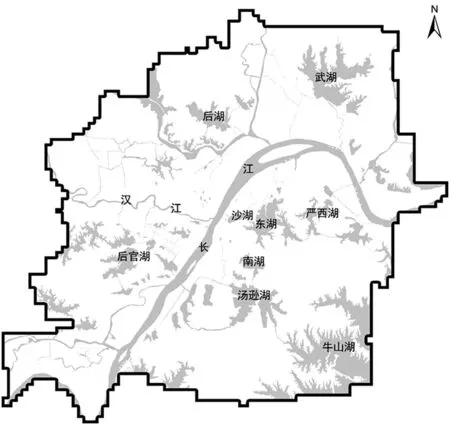
图1 武汉市都市发展区范围图
2.2 数据分析
本次正射影像初始数据采用像素工厂的匀色模型完成,整体影像色调均匀,纹理清楚,层次丰富,无明显失真[6]。但是对东湖、严西湖等大型水域近水区域放大后观测到,在近水区域,明显可见颜色失真、建筑物信息损失等情况,如图2、图3所示。

图2 东湖岸边近水区域颜色失真情况(箭头表示失真区域)
3 解决方案
针对上述水域边缘存在的问题,传统做法为利用几何纠正后未匀色16bit正射影像对匀色后8bit影像数据进行修补。由于武汉闭合水域面积大,水岸线极不规则,近水区域人工修补工作量很大,且容易遗漏,为了有效减少工作量,笔者提出一种新的匀色解决方案,关键技术及处理成果如下:
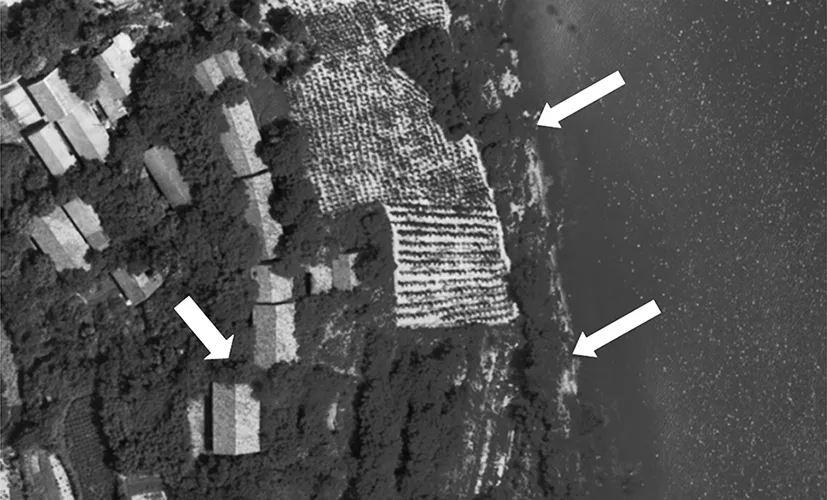
图3 严西湖岸边近水区域颜色失真情况(箭头表示失真区域)
3.1 非近水区域匀色预处理
基于像素工厂匀色模型,首先对测区多航带镶嵌工程导出快视图中非近水区域地物进行匀色,主要方法包括Photoshop软件用色阶工具去霾去雾,并对颜色偏色区域用曲线工具校正,得到非近水区域效果较好8bit快视数据。值得注意的是,此过程中尽量保留水域部分导出的原始颜色及镶嵌线痕迹,不作任何处理。
3.2 像素工厂匀色算法混合匹配
像素工厂匀色模型,MosaicOrtho环节中Local Equlization有两种匀色算法:New Equalization Algorithm和Old Equalization Algorithm(以下简称NEW算法和OLD算法)。通过与法国空客公司技术交流以及经验积累,笔者发现OLD算法在REFERENCE IMAGE颜色还原稳定性、非近水地物信息保持及颜色过渡等多方面,均优于NEW算法,3.1中快视图也是用OLD算法获取。鉴于此,通常受水域影响较小测区,均选择OLD算法。NEW算法虽然在颜色还原方面不够稳定,但是在水域面积较大测区,对近水区域地物信息保持方面又有其优势。本项目为了兼顾非近水区域地物、近水区域地物及水体颜色,利用3.1中快视图分别用NEW及OLD两种算法输出全分辨率数据。全分辨率数据量大于 500 G,远超过普通图片查看软件数据量限制,因此,一般借助于像素工厂内置影像查看模块xv3d。经过对比分析,NEW算法近水区域地物颜色信息均无损失。
3.3 MOSAIC工程单数据化
将3.2中NEW算法解算的全分辨率数据使用像素工厂中SampleImage工具按照9×9模式再次重采样成新的快视图。在Photoshop软件里对NEW算法快视图进行近水区域及水体颜色处理,去除大面积反光、云雾及镶嵌线痕迹,并适当调整水域明暗和偏色情况,保证测区整体颜色自然。利用处理后快视图成果建立单数据MOSAIC工程,并进行AutoMosaicCutline处理。像素工厂中,如果是多个模型进行AutoMosaicCutline操作,往往是为了获取模型之间镶嵌线。本文利用单数据做AutoMosaicCutline,即获取单数据范围线。将单数据范围线通过再次建立ManageMosaicProject工程赋给3.2中NEW算法输出全分辨率数据,并做MosaicOrtho得到最终成果,在Local Equlization选择OLD算法。此时近水区域及水体已经校正结束。
根据项目需求,判断NEW算法全分辨率成果在非近水区域是否满足项目规范要求。如果不满足,可再次建立ManageMosaicProject工程,将NEW和OLD快视图导入,通过明显地物(某条路后者某片植被)编辑镶嵌线,将NEW快视图近水区域(含水域)与OLD快视图非近水区域合并。并将工程镶嵌线赋给全分辨率数据工程,在MosaicOrtho环节Local Equlization和Global Ajustment均选择NO参数,输出最终成果。
3.4 实验成果
通过上述解决方案,2.2中所述近水区域颜色问题均已解决,实验成果样例如图4、图5所示:

图4 东湖岸边近水区域颜色校正后效果
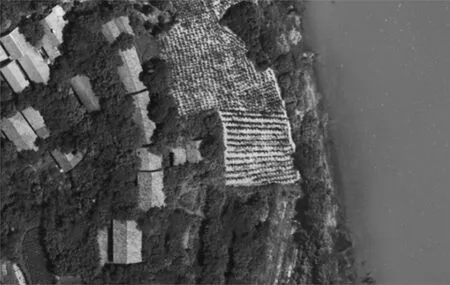
图5 严西湖岸边近水区域颜色校正后效果
4 结 语
法国空客公司研制的像素工厂作为一种大型遥感处理系统,旨在通过遥感航测处理流程的高度集成化及自动化解决传统正射影像生产存在的效率低下、软件繁杂等问题。但是在生产实践中,像素工厂在处理水域地形时,单一算法会使近水区域影像颜色信息过曝及失真。本文提出的技术方案可以有效解决相关问题,特别适用于水(海)岸线不规则、水域面积大且水体分布复杂地区的高分辨率正射影像匀色云光。
猜你喜欢
泉州师范学院学报(2021年6期)2022-01-07
水上消防(2021年3期)2021-08-21
宁波大学学报(人文科学版)(2021年4期)2021-07-07
水上消防(2020年5期)2020-12-14
文史春秋(2019年11期)2020-01-15
智能城市(2018年7期)2018-07-10
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
中学生数理化·中考版(2017年6期)2017-11-09
非公有制企业党建(2017年10期)2017-11-03
现代兵器(2017年4期)2017-06-02
