基于拉格朗日的雷达方位超分辨方法
2019-10-30 00:36:36蒋平虎苏萍贞
数据采集与处理 2019年5期
蒋平虎 张 鑫 苏萍贞
(中国电子科技集团公司第五十一研究所,上海,201802)
引 言
雷达方位超分辨是指在同一波束内,雷达对相同距离单元上的相邻目标进行分辨。雷达波束宽度越窄,其方位分辨率越高[1,2],同时波束宽度与雷达的天线孔径尺寸紧密相关,可表示为θ∝λ/d。式中θ为波束宽度,d为天线孔径尺寸,λ为波长。因此可通过提高雷达工作频率或增大天线孔径d提高雷达方位分辨率。然而,由于民用航海雷达采用实孔径波束扫描雷达,通常受探测距离、天线物理尺寸、实际工程中的安装工作及价格成本等诸多因素的制约,无法使用大孔径雷达天线[3]。
为解决上述问题,大量文献采用反卷积方位超分辨方法,主要包括:维纳滤波法[3,4]、最大后验概率法(Maximum a posteriori,MAP)[5-9]以及约束优化方法等[10-14]。维纳滤波法自20世纪80年代起已应用于雷达方位超分辨之中,如文献[3]提出快速限定迭代反卷积(Fast constrained iterative deconvolution,FCID)方位超分辨方法,依据时频域卷积特性,通过在非线性约束条件下构造收敛模型,恢复目标方位信号。在信噪比为30 dB以上时,该方法能够将雷达方位分辨率提高两倍,但无法采用自适应方式确定收敛参数,需经过大量迭代运算,因而导致其运算复杂度极高,且可控性较差。文献[4]根据傅里叶与小波变换,提出频域反卷积超分辨方法,对回波向量与天线方向图向量分别做小波变换与傅里叶变换处理,在频域中进行正交化展开,可有效降低运算复杂度。但该方法受波束宽度影响较大,无法在较宽的波束环境下进行应用。
除维纳滤波法外,相关文献中提出基于MAP理论的超分辨方法。文献[5]提出Richardson-Lucy(RL)方位超分辨方法。将回波信号与噪声以向量形式进行表示,通过引入正则化参数将扫描模型改写为正则化约束模型与贝叶斯估计模型对回波图像中的方位信号进行标识,信噪比为30 dB以上时,可获取清晰的雷达目标图像。文献[6]依据回波图像中目标方位信号的稀疏特性,提出稀疏反卷积超分辨方法,凭借稀疏目标这一先验信息,利用MAP准则对方位信息进行判断。文献[7]通过建立双层模型,提出基于局部自适应边缘保留的方位超分辨方法,可将低分辨率目标图像重构为高分辨率图像,不仅有效抑制振铃现象,同时可使高分辨率扫描图像趋于平滑。同样文献[8]采用极大似然估计与MAP理论提出超分辨方法。通过迭代运算逐步获取目标方位信息,该方法运算复杂度低,收敛性好。但由于噪声适应能力相对较差,信噪比需满足30 dB以上。文献[9]依据扫描角与可视角间的空间方位关系,构造天线调制函数,建立分段常数模型,提出一种基于空间变换的方位超分辨方法,针对高速运动的实孔径雷达,可有效提高数据处理速度,降低运算复杂度。
尽管采用上述两类反卷积方法可有效提高雷达方位分辨率,然而若接收机存在大量噪声,其幅度经卷积运算后会被放大,导致重建信号方位与真实信号方位存在较大偏差,因此这类方法的最大局限在于噪声适应能力有限。文献[10]给出范数正则化超分辨方法,针对L1范数模型,采用预测原始对偶路径跟踪算法对观测模型进行求解,可在低信噪比下实现目标信号重构。但由于无法对正则化参数进行自适应选取,导致该方法的运算复杂度相对较高。文献[11]将超分辨问题转化为无约束凸优化问题,利用Newton法实现方位信息预测,尽管可有效提高方位分辨率,但该方法对信噪比要求较高。文献[12]提出对偶-对数障碍超分辨方法,通过对天线方向图矩阵进行分解,构造凸二次规划模型,利用对数障碍法对求解模型最小二乘解,恢复目标方位信号,该方法在信噪比为10 dB以上时,可成功实现方位超分辨。运动平台与目标之间的距离-多普勒频移会对前视扫描雷达的方位分辨率会产生较大影响,对此文献[13]对运动平台与目标分别进行运动补偿,解决回波与观测矩阵的失配问题,对正则化观测模型内采用Lp范数法进行求解,成功获取目标方位信号。文献[14]提出基于交替方向思想的超分辨方法,利用拉格朗日法构造回波模型,在运算中无需对目标进行运动补偿。在信噪比大于15 dB时,可实现方位超分辨。而在实际工程应用中,文献[15]将多入多出(Multiple input multiple output,MIMO)技术应用于高频地波雷达之中,设计出高频-MIMO雷达,针对远场中存在的小时宽带宽乘积信号,能够准确计算出目标的距离、方位以及速度信息。文献[16]为提高实际工程中的信号处理的运算速度,在GPU框架内对MAP超分辨法进行编写,实时重构目标信号,有效降低系统运算。
基于上述分析,本文根据二次规划理论,提出改进的方位超分辨方法。采用矩阵向量乘积形式将卷积回波模型进行改写,结合奇异值分解与BFGS算法构造观测模型,将方位超分辨问题转化为约束优化问题,利用拉格朗日优化定理计算模型的最优解,成功恢复目标原始方位信号。仿真结果表明,该方法在低信噪比环境下,不仅能够实现雷达方位超分辨,同时相比于文献[12]提出的对偶-对数障碍法,具有较好的噪声适应能力。
1 信号模型
当雷达对某一区域进行扫描时,若该区域内存在若干点目标,此时回波信号可视为天线方向图与目标方位信号的卷积,如图1所示。利用公式可表示为

式中:x为点目标的散射信号,即目标的方位信号,假设其数据长度为N。a为天线方向图,可由天线方向性系数来表示,假设数据长度M。y表示雷达回波信号,由计算可知数据长度为(N+M-1)。n为接收机噪声。因此方位分辨可视为已知回波y与天线a,求解x的反卷积运算。

图1 雷达扫描原理Fig.1 Radar scanning principle
将式(1)以矩阵-向量乘积形式进行改写,令x表示N×1维的方位信号向量。依据天线方向图a可构造大小为N×(N+M-1)的天线方向图矩阵A,令其作为观测矩阵获取回波向量y,其中x,A,y可分别改写为
由式(2—4)可知,式(1)改写为

式(5)中,由于噪声量n具有未知性,因此无法直接采用矩阵运算对该式进行求解。若重构目标方位向量x,可采用约束优化方法。
首先构造约束优化模型,即

对其进行展开,则有

式(7)为二次规划模型,若满足凸形式,可采用二次规划方法对其求解。令W=ATA,可知矩阵W为正定矩阵,因此式(7)为非凸二次规划模型,而采用二次规划方法则难以计算模型最小二乘解。
2 方位信号重构
若实现目标方位信号重构,可构造符合凸二次规划形式的观测模型,本文提出拟BFGS模型构造方法,首先对天线方向图矩阵进行奇异值分解,则有

依据式(1)将U作为观测矩阵对目标进行观测,得到新的回波向量w,即w=Ux+n。
构造迭代矩阵Mk,令Mk=UkJk(k=0,1…),其中Uk与Jk分别表示为

式(9)中σk为尺度因子,Uk初始值满足U0=U。式(10)中νk为Jk的迭代因子,由一极小正数表示。Pk为尺度矩阵。假设利用 Newton法生成一维向量 {xk},令τ(k)表示xk的梯度,可简化表示为τk,xk与τk分别写作

式中xk初始值满足x0=w。式(11)中βk为迭代步长,为降低运行复杂度可令βk=1。
令bk=-Uτk,εk=τk+1-τk。依据文献[17,18]构造εk(初始值为零向量),并对其进行更新,更新准则为

由文献[18]可知尺度矩阵Pk可表示为


式(13)中sk满足条件sk>0,由文献[19]sk可表示为

更新矩阵Uk与Mk,更新准则为

U与x的初始值分别为U0=U与x0=w。令Mk+1=M,G=MTM,由此构造拉格朗日观测模型为

式中MTw=c,可知上式为近似的凸二次规划模型。

假设存在K与D,分别满足则式(19)的最优解可表示为

式中ˆ值与νk相关,若k→∞,则νk接近于零,此时矩阵M的最小特征值也接近于零,因此存在可逆矩阵M-1,当满足条件

终止迭代运算,此时模型最优解为重构之后的目标方位信号。
3 实验仿真
实验条件与文献[12]相同,假设雷达脉冲重复频率(Pulse repetition frequency,PRF)为1000 Hz,天线转速为100°/s,扫描范围为-15°~15°,天线方向图由sinc函数进行表示,波束宽度为2.5°。扫描区域内存在 4个点目标,其方位分别为-1°,-0.5°,0.7°和 0.9°。系统噪声模型采用高斯白噪声,信噪比为10 dB,目标方位信号与天线方向图如图2所示。

图2 目标方位信号与天线方向图Fig.2 Target azimuth signals and antenna pattern

图3 回波信号(信噪比为10 dB)Fig.3 Echo signals(SNR=10 dB)
回波信号如图3所示,当目标方位间隔小于一个波束宽度时,无法通过回波图像进行方位分辨。对此分别采用本文方法、维纳滤波法、RL法、MAP法、文献[12]方法及L2范数法重构目标方位信号。
如图4所示,当信噪比为10 dB,目标最小方位间隔为0.2°时,可计算出本文方法、L2范数法与文献[12]3种方法重构后相邻目标方位信号间的峰谷差[20],因此判定好该3种方法均可成功恢复目标方位信号,而采用其他方法重构的方位信号之间不存在峰谷差,即无法实现方位超分辨。
假设目标方位分别为-1°,-0.5°,0.7°以及 0.8°,此时目标最小方位间隔(Minimum azimuthal interval,MAI)为0.1°,分辨结果如图5所示。可知,位于0.7°与0.8°的重构信号间不存在峰谷差,即无法实现方位超分辨,由此判断3种方法的可分辨的最小方位间隔为0.2°。
令信噪比为 0dB,其方位分别为-1°,-0.5°,0.7°以及 0.9°,本文方法分辨结果如图6所示。
如图6所示,当信噪比为0 dB时,与L2范数法及文献[12]方法相同,本文方法无法实现方位超分辨,依据式(22)分别计算文本方法与文献[12]方法信号重构误差比(SRER),有
其中SRER最大,噪声适应能力越强,分辨效果越佳。SRER,其中表示重构信号幅值,A表示原始信号幅度值。SRER曲线如图7所示。当信噪比为22 dB以下时,本文方法能够获得较大SERE值,由此证明本文方法在低信噪比具有更好的噪声适应能力。除噪声适应能力外,分辨倍数(分辨倍数=波束宽度/可分辨最小方位间隔)为衡量分辨效果的另一重要指标,本文方法与文献[10]方法以及文献[12]方法的分辨结果如表1所示。

图4 不同方法分辨结果(最小方位间隔0.2°,信噪比为10 dB)Fig.4 The resolution performances of different methods(MAI=0.2°,SNR=10 dB)
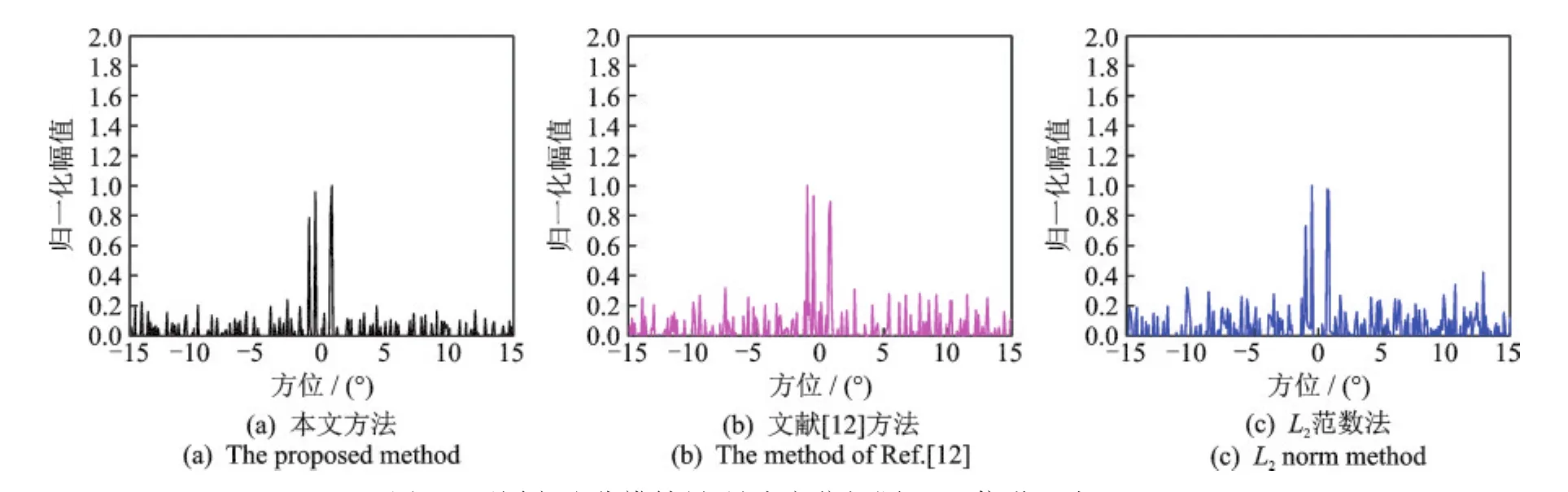
图5 不同方法分辨结果(最小方位间隔0.1°,信噪比为10 dB)Fig.5 The resolution performances of different methods(MAI=0.1°,SNR=10 dB)
由表1可知,当信噪比为0 dB时,文献[10]方法可实现方位超分辨,而本文方法与文献[12]方法无法实现,因此该情况下应选择文献[10]方法。如图7与表1所示,当信噪比为10~20 dB时,本文方法与文献[12]方法的分辨倍数均为12.5倍,优于文献[10]方法,同时本文可获取较大的SRER值,具有更好的噪声适应能力,此时应选择本文方法。当信噪比大于20 dB以上时,本文方法与文献[12]方法分辨倍数相同,但文献[12]方法具有较大的SRER值,则应选择该方法。
4 结束语
本文提出基于拉格朗日的方位超分辨方法,将超分辨问题转化为约束优化问题。通过对天线方向图矩阵进行奇异值分解,构造二次规划形式的观测模型。结合BFGS算法与Lagrange优化定理计算模型最优解,完成目标信号重构。本文方法在信噪比为10~20 dB时,具有良好的方位分辨能力以及噪声适应能力。
图6 不同方法分辨结果(信噪比为0 dB)Fig.6 The resolution performances of different methods(SNR=0 dB)

图7 SRER计算结果Fig.7 SRER performances

表1 分辨倍数比较Tab.1 Comparison of resolution magnification
猜你喜欢
幼儿园(2021年12期)2021-11-06 05:10:20
北京航空航天大学学报(2019年9期)2019-10-26 02:30:12
电子测试(2018年11期)2018-06-26 05:56:02
雷达学报(2017年3期)2018-01-19 02:01:27
中国交通信息化(2017年10期)2017-06-06 07:13:20
电子制作(2016年1期)2016-11-07 08:42:54
学习月刊(2016年19期)2016-07-11 01:59:46
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
火控雷达技术(2016年2期)2016-02-06 02:29:00