基于自然驾驶数据的高速公路出口区换道风险模型
2019-10-29 06:51张兰芳王淑丽杨旻皓
同济大学学报(自然科学版) 2019年10期
张兰芳,王淑丽,陈 程,杨旻皓,折 欣
(1.同济大学 道路与交通工程教育部重点实验室,上海 201804;2.上海国际机场集团 飞行管理部,上海 201202;3.上海市城市建设设计研究总院(集团)有限公司 道路与桥梁设计研究院,上海 200125)
高速公路出口区是直行与出匝车辆分流交织的特殊路段.直行车辆为保持车速向内侧车道换道,而出匝车辆需要从内侧车道多次换道至最外侧车道驶离高速公路,大量的连续换道行为增加了驾驶操作和交通环境的复杂性,使高速公路出口区成为事故易发区域.统计资料表明,在高速公路出入口事故中,83%发生于高速公路分流区[1].因此,为了保障高速公路出口区的行车安全,由出口区内换道行为引发的风险问题值得深入研究.
自1986年Gipps[2]提出第一个换道模型以来,国内外学者在换道行为特征与模型等方面开展了深入研究.Mori 等[3]通过集成驾驶员注视方向和车辆运动行为,采用隐马尔可夫模型(HMMs)分别对安全和危险换道行为进行建模,根据似然比确定换道风险水平以识别风险换道行为.王畅[4]通过实车试验采集自然换道数据,使用碰撞时间(TTC)和纵向相对距离表征换道安全性,并针对不同风格驾驶员设置预警条件.Li 等[5]整合TTC和避免碰撞发生所需的最小减速度(DRAC),综合考虑接近城市信号交叉口时的风险发生概率和严重程度来定义集成冲突风险指数(ICRI),并采用多元Logistic回归建立冲突风险预测模型.Noh等[6]为评估高速公路换道行为的潜在碰撞风险,定义三个风险水平(危险、警戒、安全),利用TTC和最小安全余量(MSM)作为风险指标,构造似然函数并基于贝叶斯网络确定目标车道的风险水平.Park等[7]基于停车视距引入制动距离指数(SDI)以评价换道行为是否安全,综合潜在事故暴露时间和预期严重程度,采用故障树分析(FTA)得到换道失败概率.姜雪娇[8]利用神经网络实时预测车辆轨迹,并利用空间距离和临界速度构造指标J来判别冲突严重程度,引入视觉特性参数构建碰撞概率模型,实现高速公路分流区的风险评估.
虽然已经开展了大量的换道风险模型研究,但是大多数研究集中于高速公路基本路段[9-10]、匝道合流区[11]、城市道路[12]等,从驾驶人因素[13-14]、道路因素[15]以及交通环境因素[14,16]等方面分析换道行为特征.对于多车道高速公路出口区,出匝换道行为区别于一般换道行为,存在更多的行车风险.关于多车道高速公路出口区的换道风险研究还相对较少.
目前用于换道行为分析的数据大多来源于视频录像[17]或模拟驾驶[2],由于实验设备和环境对驾驶人行为的干扰和心理暗示,往往无法反映驾驶人的实际驾驶行为.同时,研究方法大多基于理论计算[18-19]或交通仿真[20-21],难以描述不同道路交通状况下出匝车辆多次换道的行为规律,无法揭示道路交通环境客观条件对驾驶员风险偏好的内在影响,因此现有换道风险模型在解释性和精度方面存在不足.
自然驾驶实验作为研究驾驶员行为和交通安全的新手段,能够不间断记录真实环境下的驾驶员操作、车辆状况及周边环境,生成海量自然驾驶数据,为驾驶行为研究提供丰富的数据支撑.美国[22]、日本[23]以及欧洲[24]先后开展了自然驾驶项目.中国也开展了上海自然驾驶实验(SH-NDS),该实验将数据采集设备安装于实验车辆隐蔽位置,60名中等技术驾驶者出于日常的驾驶行为习惯进行独立驾驶(每人历时2个月以上),采集自然行驶状态下驾驶者和车辆运行的状态信息.
本研究提取SH-NDS中的上海市域高速公路出匝车辆驾驶行为特征数据,基于多车道高速公路出匝车辆的每一次换道风险,建立出口区换道风险评价指标体系及分级标准,定义单次换道风险等级.针对所有换道样本数据采用比例优势模型建立换道风险模型,并在该模型的基础上生成出口区出匝车辆换道风险分布图谱,解析高速公路出口区换道风险分布特征,为车流控制管理提供理论决策支持,从而减少由车辆出匝换道引发的交通拥堵和交通事故.
1 数据采集与提取
1.1 自然驾驶数据的采集与清洗
上海自然驾驶实验开展于2012年—2016年,车载数据采集系统将实验车辆由启动到熄火全过程中采集到的所有特征参数整合并录入到单一逗号分隔值(CSV)格式文件中,数据文件与对应的前视视频共用统一的时间轴.收集的数据集共包含18 241个CSV格式文件及对应的视频记录,原始数据条目多达247项,其中与本研究相关的主要特征指标参数包括车辆运行参数(位置、速度、加速度等)、实验车辆周围交通流情况(与前车速度差和距离等)以及对应的视频数据.本研究需要从海量的数据中提取高速公路出匝车辆数据,采集与提取过程主要分为五步,如图1所示.

图1 数据采集与提取过程
1.2 高速公路出匝样本筛选
基于Matlab编程和Google Earth路径检索,采用以最近邻点搜索和轨迹点偏移距离计算为内核的路径匹配方法,筛选出高速公路出口的记录,排除城市道路、城市快速路、高速公路基本路段的无关数据.
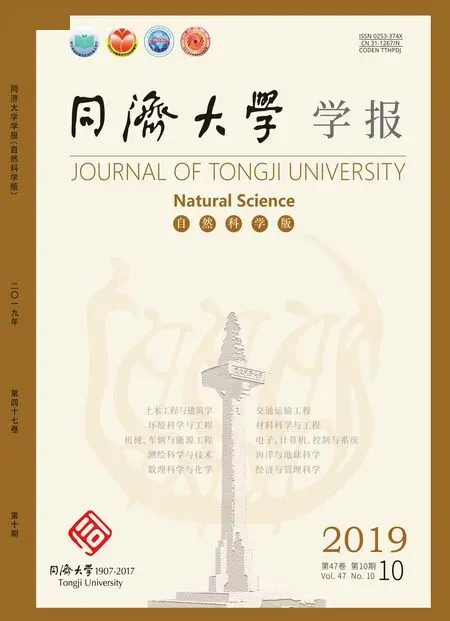
为确定实验车辆驶出高速公路出口的具体出匝时刻,首先根据实验采集到的车辆GPS信息通过Google Earth对所有筛选得到的高速公路出口进行标记,对于某一特定高速公路出口,标记如图2所示的AB连线作为出匝边界线,并获得AB两点经纬度坐标,由此可将车辆出匝时刻确定问题转化为判断路径中连续两个轨迹点连线CD是否与出口边界线AB相交.通过向量叉乘进行跨立实验得到CD两点的轨迹坐标,从而确定车辆出匝时刻的坐标.然后,以出匝坐标对应的时刻为基点向前提取数据点,以得到高速公路出口范围内(出口边界上溯3 500 m)的整个出匝过程.
1.3 出口区范围内的单次换道行为识别
本研究实验路段为单向四车道高速公路,为便于说明,将最内侧车道定义为车道1,最外侧车道定义为车道4,行进方向由左至右依次为1、2、3、4车道.由于受到出匝车辆固有换道需求的影响,出口上游段特定范围内存在较为显著的交通流扰动,其交通行为及风险特征有别于一般路段,因此本研究聚焦于出口区换道行为.
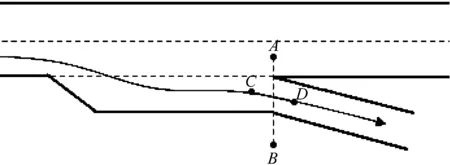
图2 高速公路出口区边界线
多车道高速公路出口区具体范围的确定方法[25]为:首先,作出所有出匝车辆的不同车道起始换道位置的累积频率图,如图3所示;然后,定义15%~85%分位值区间作为多车道高速公路的出口区范围.出口区范围示意图如图4所示,图中斜线阴影部分表示所划定的出口区.

图3 不同起始车道换道位置累积频率
Fig.3 Cumulative frequency of lane-change position on different lanes
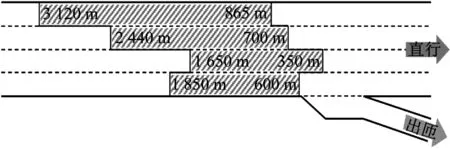
图4 高速公路出口区范围示意图
在出口区内,各次完整出匝过程的换道行为识别准则如下:①根据车道偏移参数发生从正到负(或从负到正)的突变点,识别出出匝车辆的换道行为[25],并通过视频进行验证;②采用车道偏移参数突变前后斜率为零的拐点,确定换道实施起点和换道完成终点,而位于其间的车道偏移参数突变点定义为换道中点[26],如图5所示.
图5 换道实施过程示例
1.4 换道影响变量
通过前述工作,高速公路出匝样本在出口区内的整个换道行为过程已得到识别及标定.由于自然驾驶实验选取的是具备中等驾驶技术并对路况熟悉的驾驶员,实验车辆为固定车型,以普通的双向八车道高速公路出口区为研究对象,因此不考虑驾驶人、车辆和道路线形及标志等因素.基于此,考虑高速公路出口区的交通环境和出匝换道路径因素,选取交通拥挤等级、车型分布、需求换道次数、换道方向及与出口相对距离等影响因素来构建换道风险模型.其中,车型分布V及交通拥挤等级JL反映车辆周围交通流环境对于换道风险的作用,而与出口相对距离S、需求换道次数LC和换道方向D体现了出匝换道路径选择对驾驶员风险偏好的影响,进而决定车辆换道过程的风险水平.具体的影响变量和数据来源如表1所示.
为了给后续模型构建提供完备样本集,在提取换道过程信息时对数据进行预处理,包括:①采用线性插值方法对序列中的零元素进行插补;②选择格拉布斯准则判断异常值并以相应邻近值插值修补;③采用移动平均法对整体数据进行平滑处理;④通过MySQL软件实现数据库的搭建.对高速公路出口样本进行行驶全程筛选,总计得到333组有效出匝换道样本,其中向左换道样本为122组(因受前面慢速车辆的影响,某些出匝车辆在出口区内可能会采取向左换道).
2 换道风险模型
2.1 单次换道风险分级
本次自然驾驶实验所采集的数据并未包含实际事故样本,故采用安全替代指标对单车换道过程的风险程度进行衡量.Kondoh等[27]将车头时距和冲突时间组合构造出风险感知系数RP来量化驾驶员的空间风险感知,在客观上综合前后车距离接近和车速偏离的不同情形,能够兼顾绝对和相对两种不同尺度的风险,故本研究用RP作为单车换道风险的评价指标,计算式如下所示:
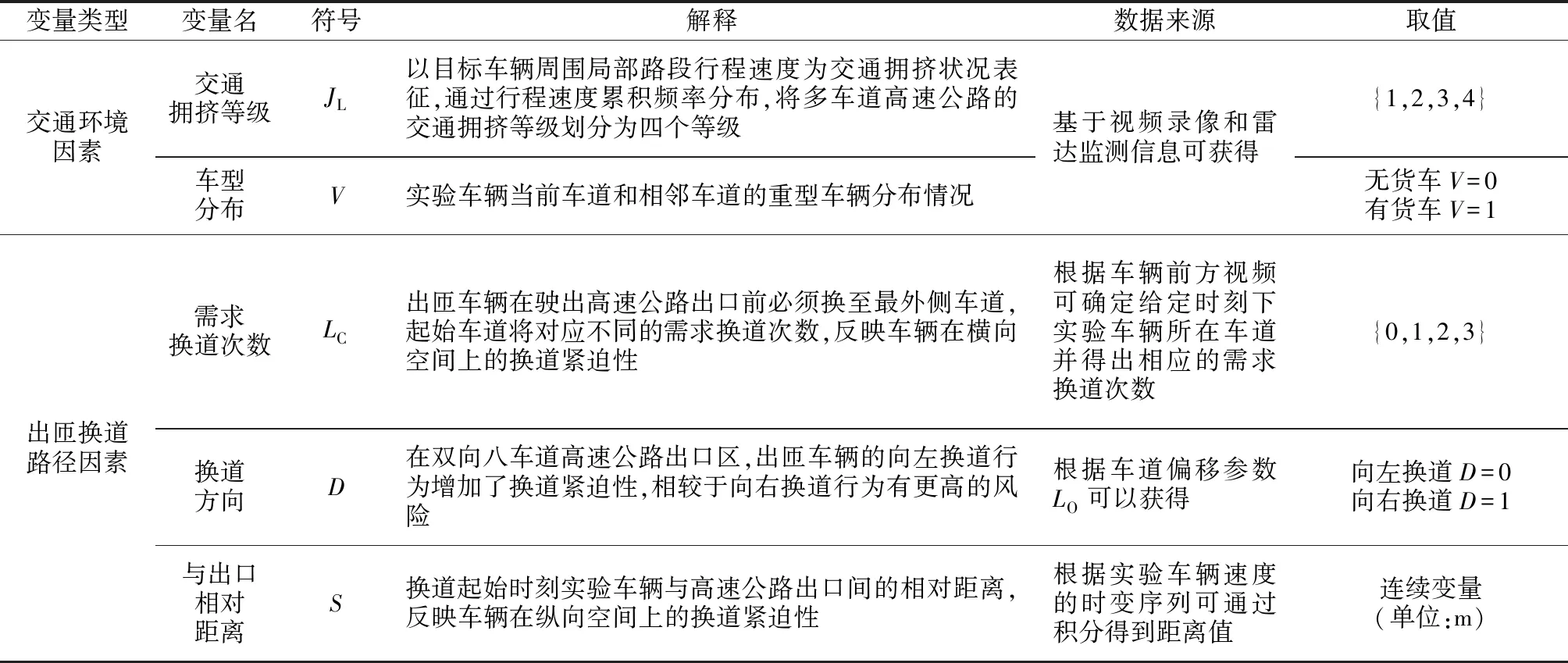
表1 影响变量及数据来源
(1)
(2)
(3)
式中:ΔS为前后车相对距离;vF为后车速度;Δv为前后车相对速度;tHW为车头时距,表示前后车相对距离与后车速度的比值;tTTC为冲突时间,表示前后车相对距离与相对速度的比值;a、b为线性加权系数,a=1,b=4,适用于跟驰车辆靠近前车并存在追尾风险的情况[27].本研究车辆在换道过程中与前车有追尾碰撞风险,因此该加权系数适用.从式(3)可知,tHW和tTTC越小,RP值越大,风险越高.
单次换道过程如图6所示.在换道中点P处,换道车辆与当前车道前车VC、目标车道前车VT碰撞概率都达到最高,因此风险量化时选取换道中点时刻作为事故临界时刻.分别计算换道车辆与当前车道前车VC、目标车道前车VT的1/tHW和1/tTTC,并各取两者较大值以求解RP,如下所示:
(4)

图6 换道过程示意图
为对换道行为风险严重程度进行定义,采用k-means聚类方法对出口区单次换道风险进行分级归类,如图7所示.根据聚类结果,风险水平被划分为较安全、轻微风险、中等风险及严重风险等四个等级,分别以特征值0、1、2、3表示.可以发现,轻微风险和中等风险等级样本分布较为密集,而分级两端较安全和严重风险等级样本分布相对稀疏,与实际交通流背景下的风险分布一致.根据具体计算,风险等级以RP=0.560、1.547、3.076作为划分阈值,从而构建因变量指标集.
对单车换道风险分级标准体系的有效性进行验证,以向左换道样本以及换道间隙小于0.7 s的单次换道作为高风险样本,同其余换道行为样本进行对比,经方差分析(ANOVA)检验,计算得F=154.25,p<0.05,因此两组样本风险水平存在显著性差异,证明所选取的高风险样本集具有代表性.然后,根据风险分级标准对选取的高风险样本集进行划分,定义将高风险样本划分为中等风险及以下时为误分,计算得到灵敏度(正类覆盖率)为97.59%,表明所构建的风险分级标准体系对于多车道高速公路出口区出匝换道过程是有效的.

图7 聚类结果
2.2 基于比例优势模型的换道风险模型
作为因变量的风险等级有四个类别,分别为较安全、轻微风险、中等风险及严重风险,各风险等级之间存在严重程度递进的次序.因此,对于多分类反应变量取值有序的情况,采用比例优势模型(POM)[28]进行回归建模.
2.2.1比例优势模型
比例优势模型又称累积比数Logit模型,是二分类Logit模型的扩展.该模型引入夹心方差估计量,有效地避免参数估计量无法考虑多分类变量间存在相关性的问题,因而主要适用于处理反应变量为有序分类变量的情形.原理是:依次将反应变量按不同的取值水平分割为两个等级,对两者建立反应变量为二分类的Logit回归模型.
本研究主要探讨出口区换道风险等级与影响因素之间的关系.自变量除连续性变量(S,LC)和二分类变量(D,V)外,多分类自变量交通拥挤等级JL需分离为哑变量形式,选取交通通畅情况JL=1作为对照类别,生成三组哑变量.自变量集如表2所示.

表2 自变量集
因变量用R表示,根据风险分级RP∈{0,1,2,3},因变量R分为四类,LogitP表示前k个类别的累积概率P(y≤k)与后(K-k)个类别的累积概率P(y>k)之间的对数比,因此可产生三个比例优势模型.各个模型均可视为一般的二分类Logit模型,计算式如下所示:
(5)
式中:PR≤i=P(R=i),i∈(0,1,2);αi为常数项,采用极大似然函数求解,i∈(0,1,2);βj为自变量回归系数,反映解释变量xj每变化一个单位所引起反应变量对数优势比变化,j∈(1,2,…,7).
2.2.2比例优势模型拟合与分析
由于本研究中因变量数目较多,因此采用方差膨胀因子(VIF)对固变量进行多重共线性诊断[29].经检验,各因变量方差膨胀因子均小于5,故认为各指标间不存在多重共线性关系,无需对因变量集进行处理.同时,比例优势模型的适用应满足平行线假定,本研究中采用得分检验方法[30],计算得χ2=20.95,p=0.103,故可认为比例优势假设成立,可以采用Logit函数作为联接函数.采用Matlab软件对样本集进行比例优势模型回归拟合,得到出口区换道风险等级的分类模型,如下所示:
为验证模型的适用性,分别进行回归方程显著性检验以及拟合优度检验.对于前者,各参数经T检验后结果如表3 所示.除与出口相对距离S对应的回归系数β1外,其余回归系数显著性水平p值均小于0.05.考虑到β1的显著性水平与拒绝域相差不大,并且与出口相对距离S变量的存在能够保证模型的可解释性,故决定保留自变量S;对于后者,采用皮尔逊检验得到χ2=730.528,显著性水平p=0.405>0.05,说明模型的拟合优度较好.
进一步地,采用OR值及其95%置信区间来定量描述拟合的比例优势模型中自变量的影响程度,结果如表4所示.

表3 比例优势模型参数估计及检验

表4 OR值及其95%置信区间
对于连续变量x1和x2,OR1>1、OR2=2.003 961,说明风险水平随着与出口相对距离及换道需求次数的增加而提升,当换道起始车道向左侧偏移一个车道时,风险等级提升的程度是原来的2.003 961倍.
对于分类变量x3、x4、x5、x6、x7,OR3=9.349 572>1,表明x3=0时(向左换道)风险等级提升的风险是x3=1时(向右换道)的9.349 572倍,即向左换道相比于向右换道存在更大的风险隐患;OR4=0.582 304<1,表明x4=0时(无货车)风险等级提升的程度是x4=1时(存在货车)的0.582 304倍,说明换道发生位置附近存在货车将导致换道行为具有更高的风险水平;x5、x6及x7均为交通拥挤等级JL的哑变量,对应OR7 由此发现,分类模型内在反映了出匝驾驶员的风险偏好规律.当驾驶人在位于左侧车道(需求换道次数多),或车道附近存在货车且交通状态为拥挤的交通流状态,或受强烈的出匝紧迫感影响时,驾驶员对风险的容忍度会明显提升. 分类模型的性能通常采用受试者工作特征曲线(ROC)进行描述.本研究所构建的换道风险模型经测试集验证准确率达到52.27%,受试者工作特征曲线如图8所示.各条曲线分别对应各个风险等级的分类效果,ROC曲线下的面积(AUC)分别为0.843 1、0.626 2、0.680 9、0.757 0,可知其中RP=1与RP=2类别分类效果相对劣于其余两个类别. 图8 比例优势模型受试者工作特征曲线 以出口区内道路平面为底图,基于所构建的换道风险模型计算特定自变量组合下的风险等级,以色块形式表征风险等级并铺陈于底图,从而生成反映换道风险分布的风险图谱,直观地揭示换道风险梯度变化.本研究以车型分布因素为例,绘制出口区是否存在货车这两类情况的换道风险图谱,如图9所示. a 无货车分布 b 有货车分布 Fig.9 Comparison of lane-change risk maps in freeway off-ramp areas under different truck distributions 在多车道高速公路上,一般货车会在外侧车道行驶,因而将受货车影响的换道行为限定为前车为货车并且换道的目标车道或起始车道为3、4车道的情形.设定轻度拥挤等级,以向右换道行为为对象,依次按梯度调整与出口相对距离变量,并按0、1、2切换需求换道次数变量代入换道风险模型,确定道路平面各点所对应的换道风险等级,从而作出不同货车分布情况的换道风险图谱.四个等级分别以特定色块表示,色块越深代表风险等级越高. 从图9可以发现,货车存在时,出口区内最左侧快车道的换道风险不受影响,而2、3车道的换道风险水平有所提升,风险区域从上游向下游扩展.主要原因在于:大货车在前会遮挡后车视野并带来较强的心理压迫感,后车一般会选择换道以避免跟驰;大货车的行驶速度慢、制动性能差,后车与之往往存在较为可观的速度差,换道过程中的临时加速及斜侧接近尤其造成风险的攀升. 依托SH-NDS项目,研究高速公路出口区的换道风险.基于风险感知系数量化换道风险,采用k-means聚类构建换道风险分级标准,定义出单次换道风险等级.考虑高速公路出口区交通拥挤等级、车型分布、需求换道次数、换道方向及与出口相对距离等影响因素,针对所有换道样本数据,选用比例优势模型构建出高速公路出口区换道风险模型,并对出口区内存在货车影响的情形进行了换道风险分布图谱分析.结果表明,当换道发生位置附近存在货车时,由于大货车行驶速度慢并遮挡后车视野,因而后车会选择换道超车以获得期望行驶条件,从而导致更高的换道风险水平. 对高速公路出口区的风险图谱进行分析,及时发现该区域的换道风险隐患.在此基础上,提出出口区内合理的交通管理和控制策略,如对于向左换道的高风险行为可设置虚实线禁止左转等措施,以控制车辆的换道行为,从而有效降低出口区换道风险. 目前的数据源于往期自然驾驶实验,受到数据时效性限制,现有条件下只能生成静态风险图谱,缺乏实用性.随着智能交通的深入发展,通过与高清卡口、浮动车、车联网等实时交通数据获取方式相结合,开发与实时数据匹配及包含多种应用场景的工具包,从而实现更为多样化的风险场景换道风险图谱的动态更新,未来能够应用于路网安全保障节点风险变化的实时监控,减少因换道产生的事故,提高道路安全水平.
3 换道风险图谱
4 结语
猜你喜欢
卫星应用(2021年11期)2022-01-19
哈尔滨铁道科技(2021年3期)2022-01-19
鸭绿江(2021年17期)2021-10-13
科学大众(2021年9期)2021-07-16
中国交通信息化(2020年11期)2021-01-14
小学阅读指南·低年级版(2017年11期)2017-12-06
汽车与安全(2017年7期)2017-09-12
中国交通信息化(2017年8期)2017-06-06
专用汽车(2016年9期)2016-03-01
专用汽车(2016年9期)2016-03-01