
基于智能计划管理的测控自动化运行系统设计
2019-10-29 08:55
计算机测量与控制 2019年10期
(西昌卫星发射中心,四川 西昌 615000)
0 引言
随着航天业务网IP网络化改造的完成和航天发射相关信息系统建设的不断深入,在建设过程中提出了很多新的理念,如自动化联调、自动化运行、运行管理、远程化操作、自动化测试、智能故障诊断[1]、智能任务辅助支持等。为解决未来航天发射任务高要求、高密度、高强度与组织指挥、技术管理、人力资源之间的突出矛盾,提高航天测控自动化运行水平,提出了基于智能计划管理的测控系统自动化运行管理理念,分析了航天测控自动化运行管理需求,运行模式、系统实现等关键技术。
1 测控系统运行管理现状
目前,因航天发射场大部分测控装备服役时间相对较长,对信息化支持能力相对欠缺,虽然已完成了IP网络化改造,实现了测控信息的网络化传输,但能够传输的信息依然比较局限,仍停留在业务信息和少量状态信息,只满足基本业务应用需求,无法实现更高层次的信息综合应用,装备运行管理仍较大程度依赖于人工操作[2],仅少部分装备实现了远程操控,距真正意义上的自动化运行仍有很大差距。
究其原因,主要集中在两个方面。一是部分测控装备相对服役年限较长,其研制时所采用的技术相对陈旧;二是新研装备设计理念没跟上时代要求或技术不成熟,导致装备自动化运行支持能力不足。这就要求各测控装备在自动化运行方面进行必要的技术革新和改造,以具备自动化运行支持能力。
2 测控系统自动化运行需求
顾名思义,自动化运行就是在不需要人为干预的情况下,装备能够完成一系列操作或处理。测控装备的自动化运行就是在不需要岗位人员干预的情况下,能够实现自动开关机、状态准备、系统自检(故障诊断)、指标测试、参与联调、数据上报等一系列功能。
航天测控的自动化运行,需要一个自动化运行管理控制中心,对所属的所有测控装备进行集中高效的管控。同时,各测控装备需具备接收管理、自主完成上述装备操作的能力。
2.1 自动化运行管理控制中心功能需求
自动化运行通常采用计划或指令方式实现,对各装备进行集中有效的管理与控制。自动化运行管理控制中心(以下简称管控中心)向各测控装备下达自动化运行的计划或指令,各测控装备接收计划或指令,自动执行相应计划,实现装备自动化运行。
因此,智能计划生成与管理是测控系统自动化运行的核心,应构建一个统一的自动化运行与管理控制中心,由其来实现智能计划生成与管理功能。

图1 自动化运行管控中心对外连接关系图
2.1.1 计划接收
测控装备的自动化运行与管理不能孤立于其它航天业务信息系统,管控中心应具备计划接收功能,接收综合运行管理系统、任务指挥系统、以及其他任务中心指挥系统等在内的工作计划,工作计划包括日常计划、任务阶段计划、节点计划(联调、空间目标监视、卫星长管等)等。
2.1.2 人工计划编制与调整
管控中心应具备人工计划编制功能,用户可通过友好的用户界面快速实现工作计划的拟制,也可通过格式文件导入,实现计划的快速录入,完成计划初步编制工作。人工计划调整功能,是为人工干预系统计划预留的接口,当自动生成的计划在某些方面不能满足实际工作需要时,可通过人工方式对计划做局部调整。
2.1.3 计划管理
管控中心应具备对所有计划进行有效管理的功能,能够完成所有计划的实时存储与管理功能[3]。
2.1.4 计划智能调整与生成
管控中心应具备计划冲突的判断与消解功能,实现所有工作计划的时间、资源冲突性判断,利用计划规则库,采用基于规则判断的计划调整模式,对工作计划进行动态智能调整,并生成最优工作计划。
2.1.5 计划上报与下达
管控中心应具备将最优工作计划实时向目标系统进行上报或下达的功能。目标系统主要包括综合运管系统、指挥系统以及测控装备端。
2.2 测控装备端自主运行功能需求
航天测控自动化运行仅仅依靠管控中心是无法实现的,主要依赖于测控装备自动化运行的支持能力。
2.2.1 计划接收
测控装备须具备接收管控中心发来的各类计划或指令的能力,并将工作计划实时转发给装备管理计算机。
2.2.2 计划解析与分解
测控装备端应具备对各类计划解析和分解的能力,实现计划的可操作性分解,将具体计划转换成一系列装备操作指令,形成操作指令集。
2.2.3 状态判断
装备管理计算机在接收到解析和分解后的装备操作指令集后,对装备自身状态进行综合判断,全程实时完成装备自检和故障诊断,对指令集的指令逐一判断,并对执行每一条指令应具备的充要条件进行全面判断,实时记录判断结果。
2.2.4 自动执行
在完成状态判断的基础上,若具备自动执行条件,装备则自动逐条执行操作指令集,并实时记录自动执行情况。
2.2.5 自主上报
测控装备应具备将状态判断结果、自动执行情况进行实时上报的功能,无论是完成、未执行、或是中止执行等情况,实时反馈给管控中心,供决策和管理使用。
3 测控系统自动化运行模式
本文提出了智能计划管理的自动化运行模式,其系统信息流如图2所示。
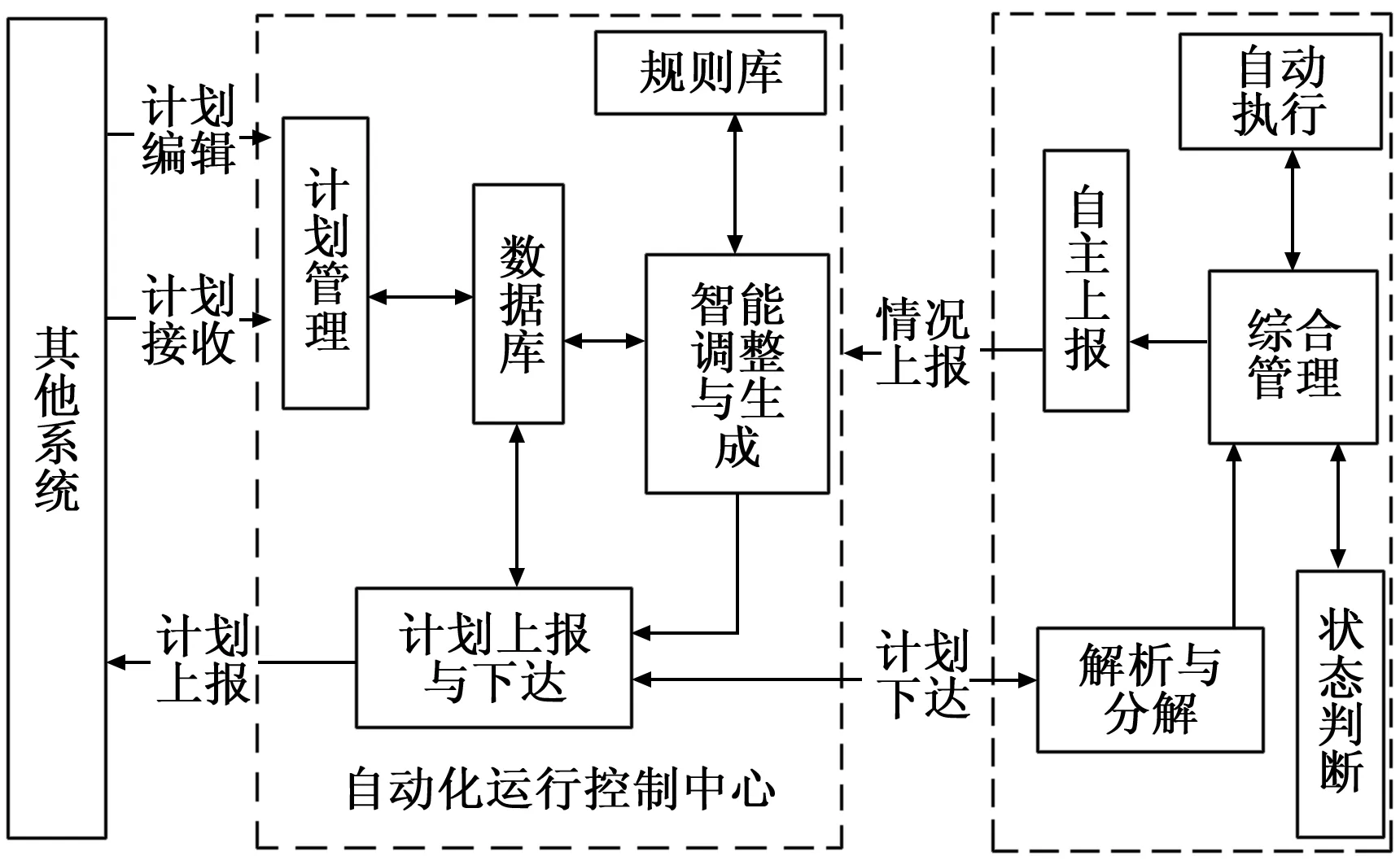
图2 测控系统自动化运行信息流图
其中,其他系统(含综合运管系统、任务指挥系统、其他指挥系统等)在具有权限的情况下,可向管控中心发送工作计划,管控中心在接收到计划后,自动触发计划时间、资源冲突性判断,采用规则判断的资源调配方法进行计划智能动态调整,自动生成最优工作计划,并完成工作计划的上报和下达。
测控装备作为执行端,在接收到下达的计划后,自动调用计划解析与分解功能,对计划进行分解和细化,实现计划向装备具体操作指令的转化,生成装备操作指令集并下达给装备管理模块。装备管理模块首先对装备进行自检和故障诊断,判断装备当前状态是否满足执行相关装备操作指令集的条件,若满足则顺序执行;若不满足则中止并上报相关情况,方便通过人工操作干预装备,实现装备的自动化运行。
3.1 系统硬件组成
航天测控自动化运行硬件部分主要由管控中心服务器、自动化运行管理终端、测控装备及其交互计算机、管理计算机、以及其它指挥应用系统等。
管控中心服务器主要完成计划接收、计划冲突判断、计划智能调整与生成[4-6]以及计划下达等功能。
监控管理终端主要为用户提供计划创建、编辑和调整的交互环境,实时展现计划执行情况,方便各级用户指挥与决策。

图3 航天测控自动化运行硬件系统体系结构
3.2 软件体系结构
自动化运行软件体系结构主要包括管控中心软件和装备端软件两部分。
管控中心软件主要包括数据支撑层、数据处理层和数据应用层,其体系架构如图4所示。
1)数据支持层主要包括计划数据库和计划调整规则库。数据库主要用于存放接收到的工作计划或管理员录入的计划。计划调整规则库主要用于存放计划调整和生成的知识规则。
2)数据处理层主要实现计划的接收、管理、处理和生成,实现计划的冲突判断,完成计划的智能调整与生成,主要包括数据通信接口、计划管理、智能计划处理、计划生成等功能模块。
3)数据应用层主要实现数据的编辑和展示,实现计划的人工录入、计划执行情况展示等,包括计划编辑和计划展示两个模块。

图4 航天测控管控中心软件体系结构
航天测控装备端软件主要实现计划的接收(数据通信接口)、计划解析、计划分析、装备综合管理、装备状态判断、计划执行、状态上报等功能,其体系结构如图5所示。

图5 航天测控装备端软件体系结构
1)数据通信接口模块需要部署在测控装备交互计算机上,完成计划的接收并向装备管理计算机(主控微机)进行转发。
2)计划解析、计划分解功能既可部署在交互计算机上,也可部署在装备主控计算机上,实现接收计划的解析和分解工作,形成最终装备可识别、可执行的操作指令(指令集)。为减轻装备管理计算机的计算负担,可将此功能部署在交互计算机上。
3)装备管理计算机(主控微机)在接收到可执行装备操作指令后,对装备是否满足执行操作指令的条件进行判断,根据判断结果确定是否执行指令并进行状态上报,主要包括装备综合管理、状态判断、计划执行和情况上报等功能。
4 关键技术
目前,在航天发射场通过运行管理系统建设,初步储备了基于计划的装备管理经验。管控中心的功能在运管系统中得到了一定的体现,运管系统中的任务辅助支持软件承担了管控中心的角色,在系统实现时已在一定程度上考虑了计划的描述、计划冲突判断以及自动消解算法等功能,在运管信息转发策略控制上进行了体现。本文重点介绍运行管理控制中心的计划描述模型和计划智能调整算法等关键技术。
4.1 计划描述模型
计划描述模型的建立过程是:首先,建立计划的分类体系和计划要素的分类体系;然后,抽象出计划要素元数据的描述模型和计划的描述模型,形成计划模板;最后,基于模板生成计划,具体如图6所示。

图6 计划描述模型建立过程
计划要素主要包括要素的标识、名称、分类以及要素说明等标识性属性[7]。航天测控计划的要素主要包括:计划编号(ID)、计划名称、所属系统、所属任务、计划中心(本单位、外单位)、计划类型(阶段计划、节点计划)、所属阶段、计划优先级、开始时间、结束时间、目标对象(参加装备资源)、工作内容、计划说明、父计划、下达或上报对象(目标对象、计划中心、指挥系统)。
考虑到计划要能够被专用系统或软件自动识别和处理,考虑可扩展性和通用性,通常计划交换格式采用XML格式表示。例如某航天发射任务的一次联调计划为例,其描述格式如下所示。
<计划要素>
//ID唯一
//01表示阶段计划、02表示节点计划
//01表示准备阶段、02表示实施阶段,03表示总结阶段
//01表示实战,02表示长管任务,03表示空间目标探测任务,04表示合练,05表示外单位联调,06表示本单位联调,07表示部站联调,08表示日常工作。
<目标对象>
……
<工作内容>//01表示A检查,02表示B检查,03表示C检查,04表示D检查,05表示E检查,06表示F信息,07表示G检查,08表示H检查,09表示I检查,10表示实时飞行。
……
//0X-XX任务XX阶段
4.2 计划智能调整算法
通过调用一个完备冲突消解规则库的方式,实现测控计划冲突的智能调整[8-11]。这种智能调整计划的冲突处理方式可以有效提高计划生成效率,减少由人工操作带来的安全隐患。
针对航天测控实际情况,建立了基于冲突检测与消解的计划任务人工智能管理数学模型。

S=[s1s2…sl]T为任务计划的状态转移向量,表示任务计划的状态演变情况,Φ=(φij)l×l为任务计划集的状态转移矩阵,表示任务计划集的变化规律,R={r1,r2,…,rm}为预先制定的任务计划分解规则,m为任务计划分解规则数。


假设任务计划的初始状态为S(0),第一次任务计划分解规则集R(1)=R,则基于冲突检测与消解的任务管理模型可表述为:
其中,⊗称为分解算子,表示在给定状态S(k)的前提下,将任务计划分解规则集R(k)作用于原始种子集P而分解产生可执行事件集P(k)的某种推理方法,例如搜索匹配法、规则演绎法等。
Sequence(·)为排序算子。它根据排序规则集RS,并按照某种算法将所有事件在时间轴上进行排列。E*为中间变量,它表示由推理分解产生的可执行事件集经排序处理后的事件集。
Validate(·)为冲突检测与消解算子。它依据冲突检测与消解规则集RV,并按照某种智能算法对事件之间的矛盾冲突进行检查并予以排除,其基本的算法框架结构如图7。

图7 计划智能调整算法
首先,系统自动检测有无新的计划录入,录入途径有人工录入的方式和其他系统向本系统发送的方式。当系统发现数据库中接收到新的计划后,自动将当前数据库中的未完成的计划取出作为初始计划,使用冲突检测规则库对其进行冲突检测,看有无冲突情况出现。若发现数据库中的计划存在冲突,则对当前的冲突进行简单分类,初步判定其是否属于可消解的冲突。通常冲突都是体现在一个时间区间内,存在测控装备资源的矛盾和计划时间的冲突性。
系统在识别出冲突区间后,在该区间内根据计划调整规则库中的规则进行智能匹配,使用最优规则对当前计划进行一系列智能调整,消除当前计划中存在的冲突。
对于每种冲突,计划调整规则库中可以有多种计划调整策略,同时,对于一种计划调整策略也可能解决多种冲突问题。一个经过冲突检测消除冲突的计划往往带来新的状态,如事件时间或相互关系的变化,这种改变有可能导致新的冲突,所以有必要重新进行冲突检测。因此,在计划优化过程中往往需要反复进行计划修正和冲突检测,直到冲突消解或者迭代循环超限而终止。多数情况迭代是一个收敛的过程,但是为防止在特殊情况下循环条件始终满足而使程序无休止的运行,设置一个迭代次数n(设计中将进行中及未开始计划的数量总和作为迭代次数),该值的选取可根据实际情况进行调整,使之既能保证冲突消解所需的必要条件又能有效地控制运行时间。
计划智能调整就是在一定约束条件下,按照某一目标函数对计划进行合理调整,使目标函数达到最优。约束条件包括测控能力约束、有效时间约束、测控任务约束和测控资源约束。
测控能力约束主要包括:
1)测控频段约束。测控目标与测控资源的频段相匹配才能进行测控。
2)目标飞行阶段约束。考虑到测控资源可测控弧段,对于目标的不同飞行阶段,应使用不同的测控资源。
3)测控资源功能约束。测控资源分为能够同时完成所有测控事件类型的全功能站(统一测控系统)以及能提供部分测控服务的单功能站,如遥测单收站、遥测遥控站等。
有效时间约束主要是为了合理调配人力资源,主要包括:
1)任务时间约束:各项计划尽量安排在8小时工作时间内(实战任务、空间目标探测、长管任务除外)。
2)状态切换时间约束。同一性质的联调尽量不能安排在24小时内,参加任务的装备在射后12小时内尽可能不安排计划。
3)均匀分布约束。计划在阶段划分中均匀分布。
在计划安排上,尽量避免冲突,有冲突时,进行微调(目标时间向前或向后取最小时间间隔。
冲突调整的规则主要包括:
1)指挥系统发送的计划指令优于任何计划,优先执行。
2)在无指挥系统更改计划指令的情况下,实战任务计划优先级最高,不可更改。
3)在无指挥系统更改计划指令的情况下,外单位长管任务、空间目标探测任务优先级次之。
4)在无指挥系统更改计划指令的情况下,合练任务优先级高于联调(本单位、外单位)。
5)在无指挥系统更改计划指令的情况下,外单位联调高于本单位联调。
冲突调整的目的是确保对高优先级任务的影响最小。为此,定义了任务重要性优化目标函数:
其中:ξij为决策变量,若任务i在时间段j上被完成,其值为1,否则为0;JPi为任务的优先级。
5 应用初探
在航天测控运管系统设计中,努力向自动化管控中心的功能靠近,其中任务辅助支持软件承担了一定的自动化运行管理角色,是运管系统的计划管理中心,它有一项功能为运管信息转发策略控制,主要根据现有活动任务子网组成及工作计划(依托任务计划信息数据库),生成未来一段时间段内运管信息转发策略。
在任务辅助支持软件中,任务计划定义如图8所示。

图8 运管系统数据库中计划定义表
当用户录入的计划与现有计划冲突时,系统自动对冲突进行判断并提醒,当用户确认允许冲突的情况下,系统自动对转发策略进行调整,形成最终转发策略。计划冲突如图9所示,优化后的转发策略如图10所示。

图9 运管系统计划编辑(冲突)

图10 运管系统中生成的转发策略
6 结束语
本文从测控系统运行管理现状出发,梳理了测控系统自动化运行的相关需求,探讨了测控系统自动化运行模式,设计了系统的软硬件体系,论述了系统实现中的关键技术,并在发射场运行管理系统建设中进行了初步应用。
猜你喜欢
振动与冲击(2022年19期)2022-10-17
儿童时代(2022年4期)2022-04-19
军事文摘(2021年22期)2022-01-18
航天标准化(2021年3期)2021-12-25
建材发展导向(2021年9期)2021-07-16
建材发展导向(2021年9期)2021-07-16
中国船检(2020年11期)2020-11-27
航天工业管理(2020年6期)2020-08-11
学苑创造·A版(2019年8期)2019-08-15
中国外汇(2019年22期)2019-05-21
