
基于故障预测与健康管理的DIMA动态重构技术综述
2019-10-29 08:55郭阳明1琪1孔德岐
计算机测量与控制 2019年10期
郭阳明1,米 琪1,张 双,孔德岐
(1.西北工业大学 计算机学院,西安 710072;2.航空工业西安航空计算技术研究所,西安 710072)
0 引言
高性能、高可靠的航空电子系统是先进战机实现作战任务功能、实施作战任务管理和提升作战任务效能的重要保障。随着未来信息化战争模式的变革与发展,先进战机机载设备数量不断增加,作战能力需求不断提升,这种发展情形下庞大的信息和实时的处理需求对系统资源能力提出了更高的要求,如何提高系统资源保证能力、系统任务完成效率、系统容错能力成为航空电子平台需要面对的基础问题。
PHM技术作为DIMA资源组织和系统重构的基础,是系统完成任务的保证。为此,PHM技术在航空电子领域得到广泛的重视与研究。PHM技术采用先进的传感器采集航电系统数据,利用神经网络、模糊逻辑、专家系统等推理算法对航电系统的健康状态进行评估,并对可能发生的故障进行预测,根据评估及预测结果对系统提供一系列维修保障措施,是一种集故障检测、诊断、隔离、健康预测、评估、系统维护、决策于一体的综合技术[1-2]。从资源级到任务级,PHM技术将支撑航电系统状态的数据采集与检测、故障监控与管理、系统重构与降级等任务实现。此外,PHM作为基于状态的视情维修(CBM)的使能技术,可以大大地提高资源利用率和任务成功率,降低全寿命周期费用[3]。
DIMA动态重构技术可以使飞行器充分利用功能冗余来进行系统重构,使其快速适应故障或特殊任务环境,因此动态重构技术可以降低航电系统对硬件资源余度的要求,允许飞行器在出现大规模故障或战斗损伤的情况下,仍能保证一定的飞行能力,使飞行员继续完成任务或安全返航[4]。因此,当PHM系统检测到航电系统资源退化或功能变异时,依据系统硬件资源的有效性,面向任务需求进行资源重组,可以使航电系统以最优方式为任务的完成提供服务。
本文在梳理PHM技术内涵及DIMA体系架构的基础上,分析了DIMA任务组织和调度特点,并在此基础上面向任务需求,论述了基于PHM的DIMA动态重构机制,给出了DIMA动态重构模型及重构策略。
1 PHM的技术内涵
根据DO-297设计手册对航电系统PHM的定义[5],PHM技术包括故障预测与健康管理两层含义。其中故障预测是指根据传感器采集到的数据预先诊断部件或系统完成其功能的状态,预测部件的性能下降状况,从而确定部件的剩余使用寿命或维持正常工作的时间长度;健康管理是指根据故障预测结果、设备可用资源情况及系统任务需求对维修活动做出适当的规划和决策[6-7]。
PHM的技术结构如图1所示。在航空电子领域,PHM技术主要分为以下几个步骤:1)通过分布式传感器采集航电设备的数据信息;2)对采集到的数据进行预处理、特征提取、信息融合等处理,获得表征系统性能状态的特征信息;3)基于数据处理的结果运用智能推理算法监控和管理航电设备的健康状态,预测系统发生故障的部位、时间及部件的剩余使用寿命;4)根据系统健康状态变化趋势、历史状态信息、任务执行状况、资源使用情况等,给出系统维修保障措施。
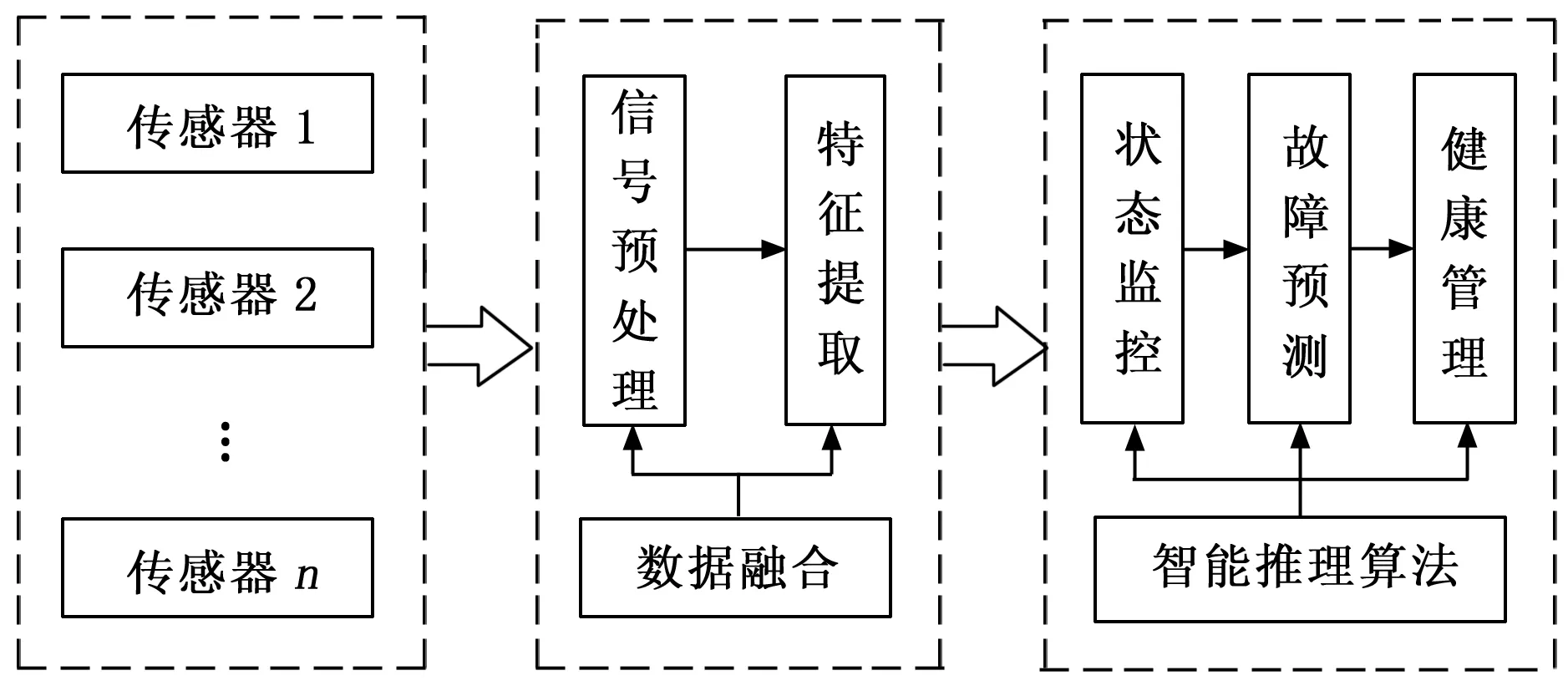
图1 PHM技术结构框图
PHM作为航空电子系统健康监测与管理的技术,能够为航电系统提供全面的故障检测、隔离、预测及状态的管理,显著提高对航电系统工作状态的了解,最大限度的利用传统故障检测技术和先进软件建模方法获得极为精准的故障检测和隔离结果,并能收集和处理航电设备部件的性能信息从而有效地预测这些部件的剩余使用寿命,最终实现精确预测将要发生的故障并在故障发生前更换该部件或寻求最优解决途径,实现视情维修[8-9]。
2 DIMA的体系架构和特点
DIMA在继承IMA优势的同时,通过分布式系统架构和高容错的实时通信网络,将分布于飞行器的多个综合化模块相连接,进而提供资源共享的鲁棒式分区系统。同时,DIMA通过将分布式模块电子就近分布在靠近信号源的区域,并且与前端信号源的预处理相结合,从而提高整个航电系统的资源整合与信息共享程度[10]。因此,DIMA能够高效地设计具有混合关键型应用的分布式系统,避免了传统分布式系统中对关键和非关键型功能灵活整合所面临的冲突。
2.1 DIMA的体系架构
DIMA作为分布式系统,其每个子系统都基于自身的IMA体系架构,如图2所示。
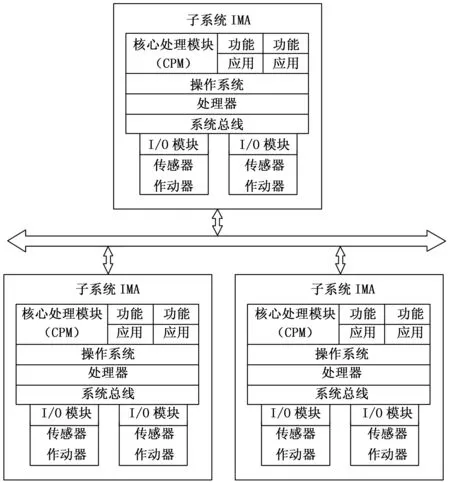
图2 DIMA体系架构图
DIMA通过分布式实时通信网络在分布式处理单元和各个功能模块间传输数据,同时应用程序间通信和I/O处理技术使得系统中能够集成多个应用程序,并且在应用程序间保持强大的时空分区[11]。因此,DIMA实现了I/O处理模块与应用处理模块在物理层次上的严格隔离,形成了天然的故障传播壁垒,此外,远程数据集中单元可用于与下一个通信系统处理单元交换I/O数据,层次化的体系架构降低了布线及系统的复杂度,处理单元间的数据共享降低了所需的总体系统处理功耗及所需硬件。
2.2 DIMA任务组织的特点
航电系统的功能需求与其任务使命是紧密相关的[12],因此可以通过研究DIMA任务组织与结构之间的关系,给出DIMA任务组织结构,用于指导DIMA动态重构模型的搭建。
如图3所示,DIMA按任务组织可以划分为层次化的网状拓扑结构,按照任务最小耦合关系划分原则,可以将任务划分到不同的分区,分区中任务被分解为原子化的子任务,子任务由通用功能提供支撑,通用功能可以分解为多个相互独立的操作过程,最终每个操作过程被映射到相应的物理实体上。因此系统中针对应用的实现都可以通过一个概念标示的任务—功能—资源层次结构来实现。由此可以看出,系统的生存能力与硬件资源的可用状态以及任务的逻辑调度直接相关[13]。
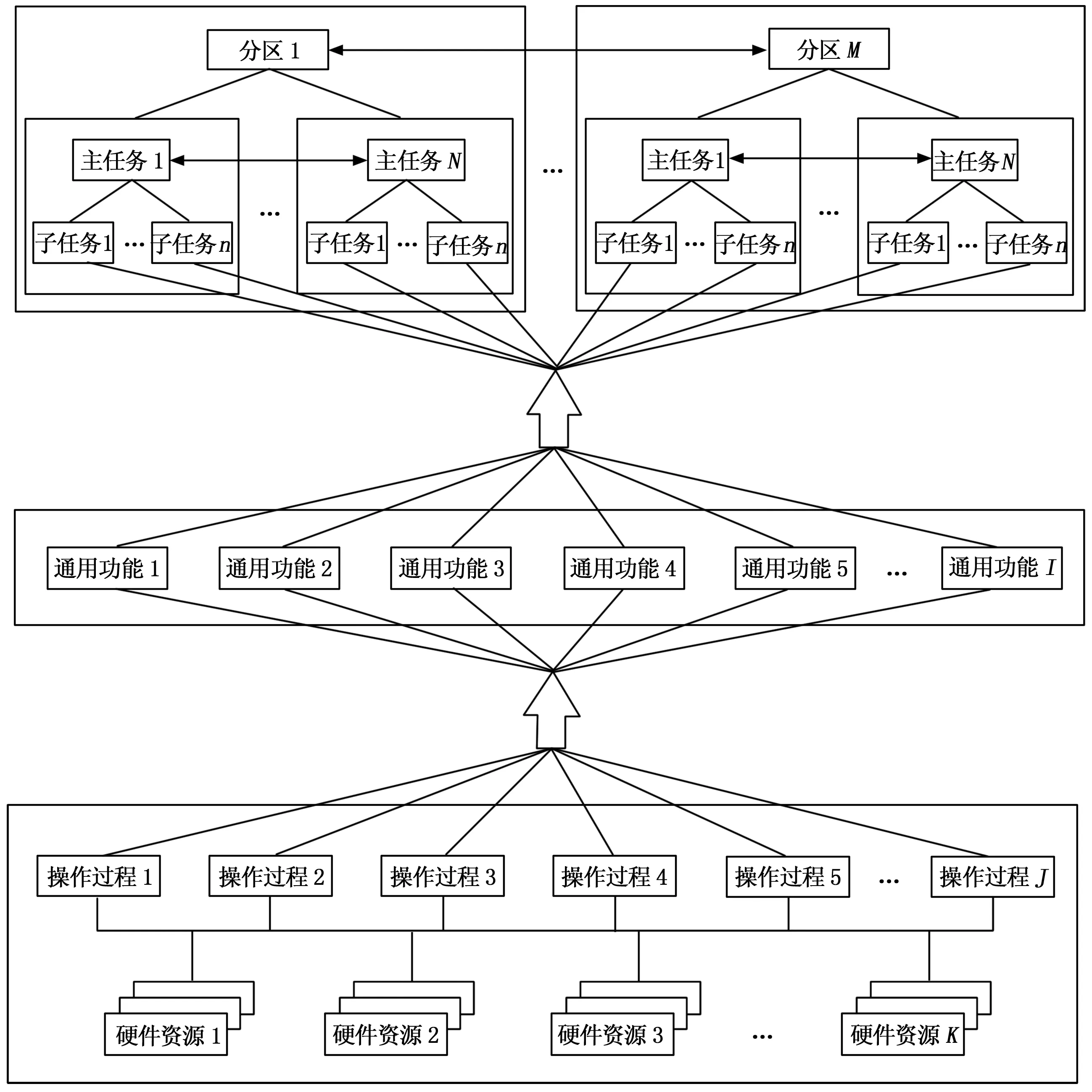
图3 DIMA任务组织结构
在图3所示的DIMA任务组织结构下,ARINC 653标准规定了DIMA任务调度的特点如下[14-15]:
1)采用多分区双层调度模型,上层运行分区调度器,下层运行核心调度器。其中分区调度器按照优先级对分区内的任务进行调度,核心调度器按照系统配置的调度表对分区进行调度。
2)核心调度器以分区为调度单元,系统中包含多个分区,分区无优先级。每个分区拥有特定的周期,核心调度器采用时间片轮转的方式为每个分区提供时间窗口,分区间相互独立,加载于分区上的任务只能在所属分区的时间窗口内才可能被执行。
3)分区由一个或多个任务组成,每个任务隶属于特定的分区,任务具有优先级。分区调度器以任务为调度单元,任务在任何时刻都可以被更高优先级的任务抢占资源。
3 基于PHM的DIMA动态重构模型
PHM能力主要体现在故障监测、诊断、预测以及健康管理几个方面。故障监测、诊断、预测的作用是实时提取特征数据并加以分析,鉴别和定位系统问题;健康管理的作用则是针对已知的系统问题,对系统资源配置进行自适应调整,针对系统任务进行重构、降级等决策与操作。
3.1 DIMA动态重构机制
可重构DIMA希望通过移动驻留于故障运算模块的应用软件至备用运算模块,以达到改变平台配置的目的,从而提高飞行器的可靠性、保障其安全性,减少计划外维护费用及重构对取证带来的影响。当PHM系统检测到航电系统资源退化或功能变异时,DIMA动态重构系统会依据当前航电系统的资源及功能有效性,面向任务需求进行资源重组,使航电系统以最优方式完成任务的执行。
DIMA动态重构机制是在PHM实时检测或预测信息的基础上,基于当前系统的有效能力,针对某个任务需求对系统进行重新配置,以实现资源的合理分配,总体方案如图4所示。在进行系统重构时,还需要考虑有效性的时效,在分析资源与任务需求相容关系的基础上,通过对系统资源能力进行评估,调整系统的资源配置。当硬件资源无法支撑所有任务需求时,则被迫进行系统降级,在尽可能维持系统安全状态的基础上,去除一些优先级较低的任务需求,用一个新的需求向量进行重新配置。
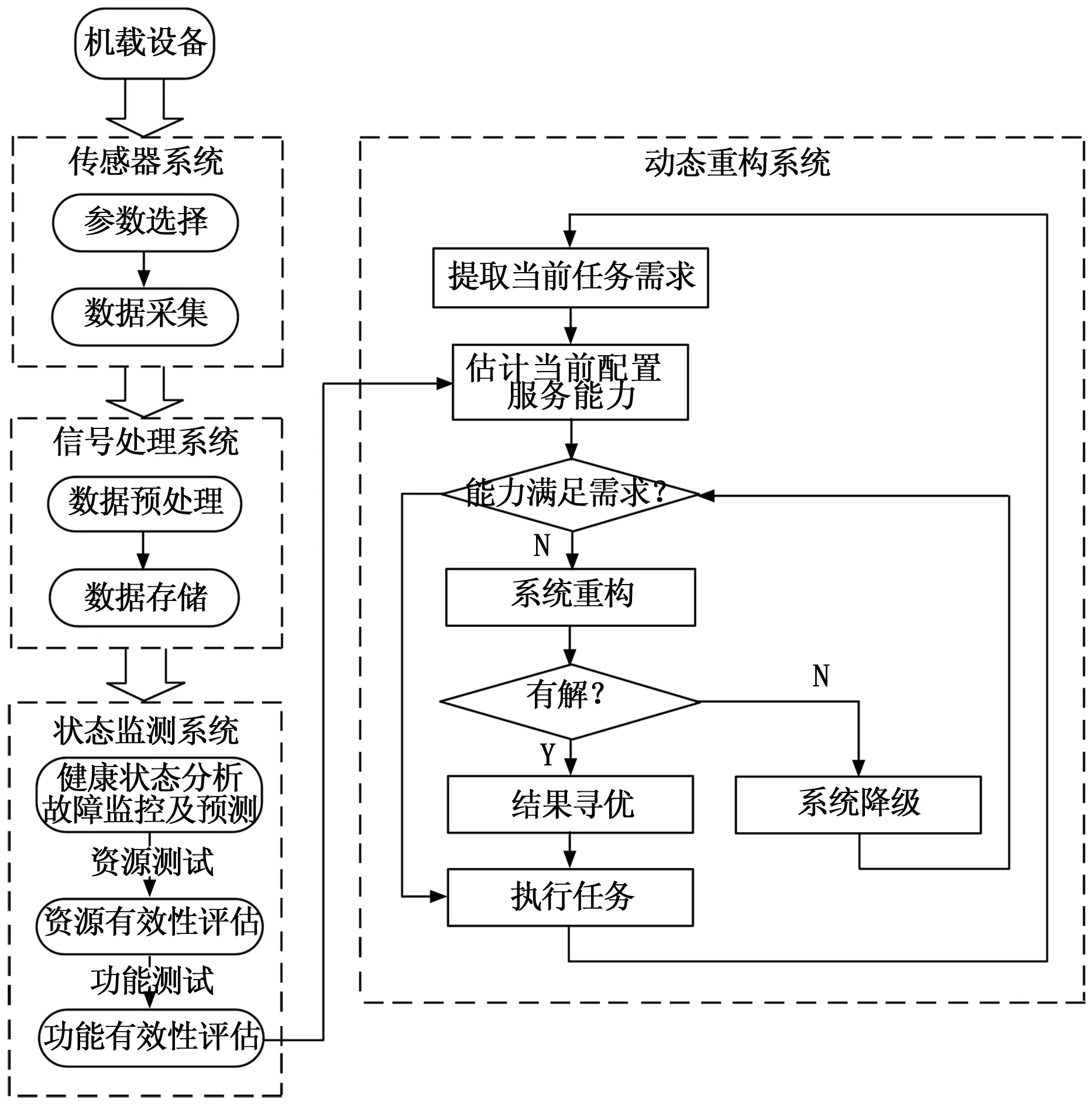
图4 基于PHM的DIMA动态重构机制
DIMA动态重构行为由通用系统管理(GSM)控制,在执行重构时,GSM所需的配置信息由蓝印系统提供[16-17]。依据ARINC 653标准机载电子设备健康监控体系[18-19]以及DIMA体系架构、任务组织结构及动态重构机制,可以看出,重构可以分为系统级重构、子系统级重构、模块级重构以及分区级重构。当系统检测到资源故障或功能变异时,系统故障管理或应用发送重构命令给系统级重构管理,系统级重构管理接收命令后开始由上到下逐级进行重构工作,确保重构时系统、子系统、任务逻辑及资源状态的一致性,使得系统最终达到一个确定的状态,重构过程如图5所示。
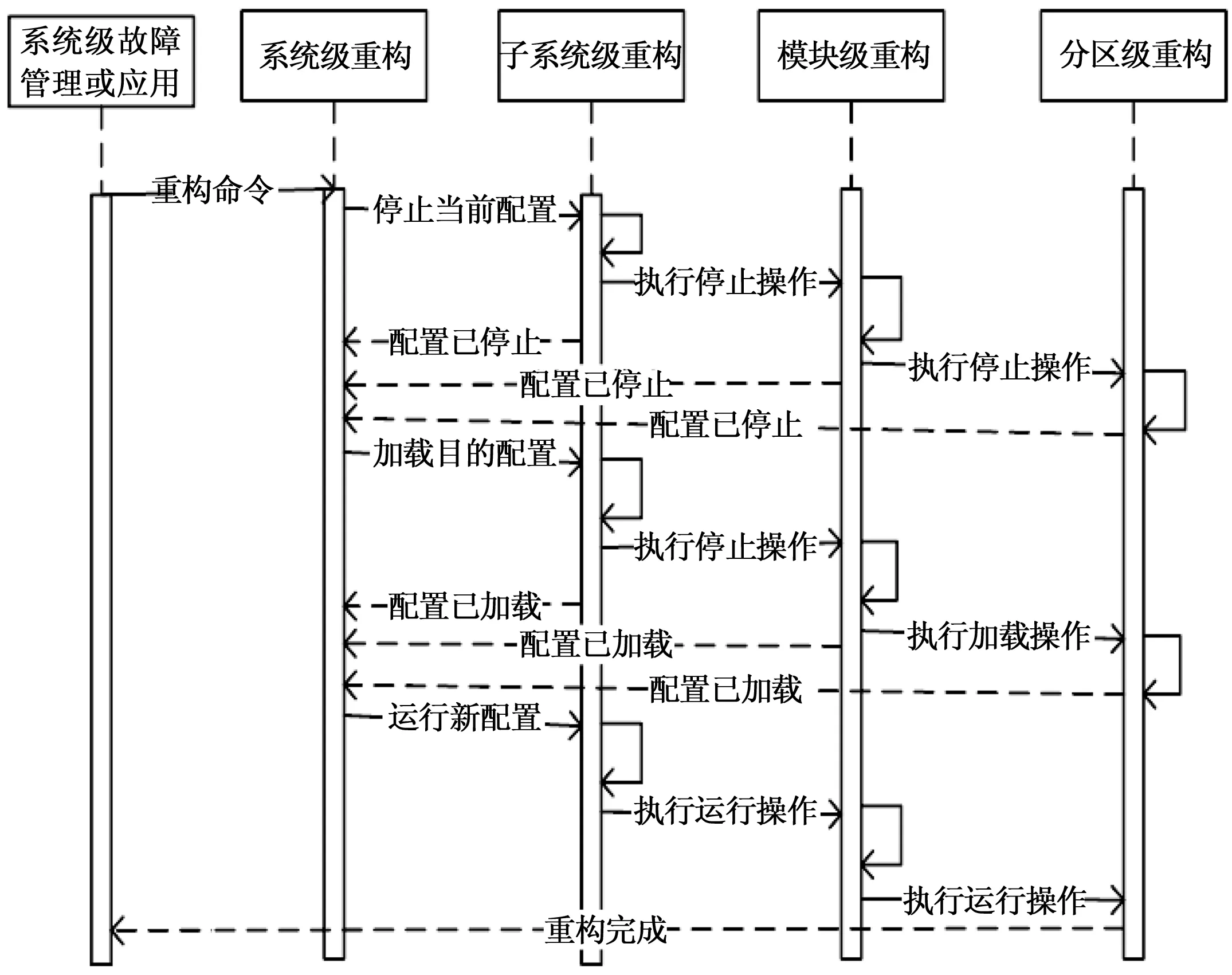
图5 DIMA动态重构过程
分区级重构负责管理一个分区单元,监视本分区内软硬件资源的健康状态,对故障进行监测、定位、隔离,并选择合适的重构策略对故障进行处理,本级无法处理的故障则交由上级进行处理。
模块级重构负责管理一个IMA模块,监视本模块内各分区的健康状态,处理产生的故障,本级无法处理的故障交由上级进行处理。
子系统级重构负责管理一个IMA子系统,监视该子系统内各模块的健康状态,处理子系统内产生的故障,本级无法处理的故障交由上级进行处理。
系统级重构是整个系统的最高管理级别,负责管理整个系统,监视各子系统的健康状态,处理本级和下级上报的故障,响应系统的重构命令。
3.2 DIMA动态重构策略
根据ARINC 653标准中健康管理相关规定[19]及目前已有的DIMA重构管理方法相关研究[17-18],DIMA动态重构策略如下:
规则1:在子系统中进行的是分区级的模块重构,采用N+1方式实现重构,所有同一类型模块在同一机箱内只有一个备份模块,并且备份模块都处于热备份状态,当子系统中任一模块发生故障时,都可以使用备份模块替代故障模块进行工作。
规则2:当子系统中每种故障类型模块都有备份模块时,则可以使用备份模块替代故障模块进行工作。
规则3:当子系统中主控模块出现故障,并且没有主控备份模块但有普通备份模块时,则选择一个普通备份模块替代主控模块进行工作,对整个子系统进行故障管理。
规则4:当子系统中模块出现故障,并且没有备用模块可用时,按照规则5进行系统级重构。
规则5:当系统中某个子系统有备份模块时,则选择一个备份模块代替故障模块进行工作,对整个系统进行故障管理,当系统中任何子系统都没有备份模块时,则按照规则6进行降级重构。
规则6:系统中各功能应用都具有优先级,当系统中无备份模块可用时,系统会根据优先级进行降级重构。如果故障模块上执行功能的优先级最低则关闭故障模块,系统失去相应模块的功能;如果存在比故障模块上执行功能优先级低的功能应用时,则系统关闭优先级最低的功能应用,然后修改配置信息,最后将故障模块上的功能应用重新定位到新的处理模块上。
4 结论
PHM作为航空电子系统故障预测与健康管理的关键技术,是一种集故障检测、隔离及维修保障于一体的综合技术,这种技术能够更为全面的了解航空电子系统的工作状态,最大程度的利用传统故障检测技术及先进的软件建模方法,对可能发生的故障进行监测,以获得高精确度的故障检测和隔离结果。PHM技术还能通过传感器采集到的数据预测关键部件的剩余使用寿命,增强操作人员对系统剩余能力的了解,以便及时对关键部件进行维修。当PHM系统检测到DIMA系统资源退化或功能变异时,DIMA动态重构技术能够根据系统现有的资源能力状态,从软件层面对系统进行重新配置,以实现资源的合理利用及系统的正常工作。用于维修决策的动态重构模型构建以及重构过程中智能推理算法的选择将成为健康管理的关键,因此按照可靠性、实时性的方向对系统动态重构技术进行不断改进是十分必要的。
本文在研究PHM技术内涵、DIMA体系架构的基础上,分析了DIMA任务组织和调度的特点,并在此基础上详细介绍了DIMA动态重构过程及动态重构策略,为下一步硬件资源能力评估、系统动态重构仿真以及重构过程可靠性分析提供了更有效的指导。
PHM技术作为航空电子系统上的健康诊断和管理技术,不仅能最大限度保障飞行器的运行安全,完成既定的任务,而且能够提高系统的可用性和降低系统的寿命周期费用,目前已经在航空电子领域得到大力发展和广泛应用。采用PHM技术是提高飞行器经济可承受性、保障性和安全性的有效途径,从国内外研究现状可以看出,PHM技术已经成为飞行器设计和使用过程中的一个重要组成部分,大力开展PHM技术的研究、解决PHM技术的瓶颈问题,能够为我国新一代航空电子设备的研制提供技术储备,更好地促进我国航空工业的快速发展。
猜你喜欢
大众科学(2022年5期)2022-05-18
环球时报(2022-03-29)2022-03-29
民用飞机设计与研究(2020年1期)2020-05-21
电子制作(2019年7期)2019-04-25
智富时代(2018年6期)2018-08-06
智富时代(2018年6期)2018-08-06
中国集体经济(2017年1期)2017-01-04
中国新通信(2016年11期)2016-08-09
珠江水运(2016年6期)2016-05-03
电脑知识与技术(2016年3期)2016-04-07
