
自动化专业核心课柔性实验平台设计与实现
2019-10-28 11:36钱玉恒杨亚非
实验技术与管理 2019年10期
钱玉恒,杨亚非
自动化专业核心课柔性实验平台设计与实现
钱玉恒,杨亚非
(哈尔滨工业大学 飞行器控制实验教学中心,黑龙江 哈尔滨 150001)
该文引入柔性化设计思想,研制了核心课实验教学平台,从电机多种变负载设计、Matlab工具引入、面包板环境构建,到外部接口设计、学生电机驱动器制作,使平台具备了灵活的实验更新能力、开放的外部拓展能力及丰富的控制算法资源。从学生反馈信息来看,加大“做和练”实验内容后,使问题式教学得到充分落实。该平台深受学生好评,并获2018全国高校教师自制设备创新大赛三等奖。
自动控制;实验平台;直流伺服电机;问题式教学
在学校创建双一流大学教学改革思想指导下,控制科学与工程学科教学委员会经过充分调研和酝酿,制定出本科自动化专业具有里程碑意义的课程改革方案[1-2]。主要目标是强化专业核心课程,完善课程之间的关联度和整合度,解决实践教学薄弱问题[3-4]。专业核心课建设是自动化专业课程教学改革的重点,核心课将注重控制理论与实践的有机融合,将“自动控制原理”“现代控制理论”“自动控制元件与线路”“控制系统设计课程设计”“单片机”“计算机控制”和“控制系统设计”7门专业课融合成自动控制理论(简称理论课)和自动控制实践(简称实践课)2门核心课。
核心课面向全校选择自动化课程的所有专业,课程缩减了理论部分,增添了实践部分,实验中加大“做和练”的力度,更注重实践教学实效。实验内容密切结合课程知识要点,重视知识的连贯性,强调自动化专业知识与物理、机械等专业知识的交叉融合,全面提升学生专业实践能力[5-6]。
为满足设计性、创新性实验对设备的需求,对实验教学设备充实和改进,并研制了核心课柔性实验平台。
1 实验教学背景
在课程改革前,实验以支撑原理和熟悉操作技术为主,仅发挥着基础性教学作用,依附于课程的实验项目相互独立,实验关联度偏弱,并具有下列典型特征[7]:
(1)验证性、仿真性实验偏多,设计性实验不足,影响学生系统性、综合性能力培养;
(2)实验过程的“做和练”偏少,缺乏发现问题和解决问题的历炼,难以激发理论的深入思考;
(3)实验设备功能单一,缺乏可扩展性,实验项目很难更新或调整,不易激发学生求知兴趣。
2 平台设计与改革实现
2.1 平台设计思想
平台设计以课程改革为指导[8],坚持懂理论、会设计和能实现的自动化专业人才能力培养方向,强调动手锻炼和制作实现,并遵循以下设计思想:
(1)增加设计性实验内容,强调人才系统性和综合性能力,展现理论教学与实践教学相统一的一流人才培养模式;
(2)增添“做和练”实验比例,强调制作过程和系统实现,确保问题式教学落到实处;
(3)注重平台开放性设计,满足实验项目不断更新需要,做到平台资源共享,并能服务于多门课程;
(4)引入柔性化理念,重视软件环境和实验对象的灵活性、适应性设计,为个性化教学提供良好条件;
(5)强调产品化设计,考虑体积、安全及成本设计要素,尽可能节省教学资源。
这些思想旨在增加实验内容深度和实验过程的实施难度,强化专业基本功锻炼,培养学生掌握专业知识、了解科技前沿,锻炼学生独立科研能力和创新意识。
2.2 平台研制
基于上述设计思想,平台设计以实现实验灵活性、开放性及综合性为主线,构建学生自主实验和动手锻炼的实验环境,适合核心课或其他课程大部分实验。
平台由计算机、控制卡、直流伺服电机、实验箱(标准接口、面包板等)及外部被控对象(电子、机械对象)组成,该平台结构框图见图1。
平台主要支持核心课实验教学外,还支持运动控制、最优控制、智能控制等课程的实验教学,体现平台的综合应用能力。平台现有数量70台套,学校16个专业的2500学生受益(自动化、计算机、电子信息等专业)。
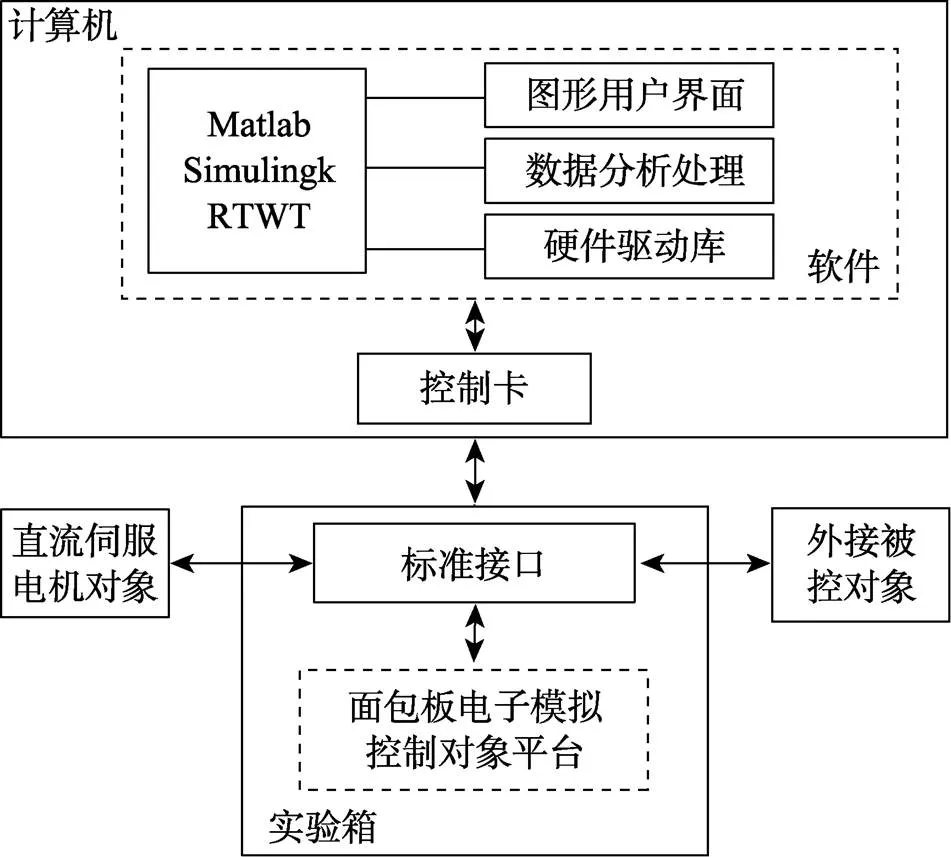
图1 柔性实验平台结构框图
2.2.1 平台软件环境与控制卡
平台选用Matlab软件工具,因为Matlab具有强大的计算能力、丰富的控制模块库、图示化编程模式,以及控制领域国际化应用趋势。Matlab涵盖连续、离散及非线性系统的各种分析与控制程序,便于开展复杂控制系统设计和控制算法研究,促进学生熟练掌握Matlab应用技能[9-10]。
Matlab通过控制卡标准接口与外部对象连接,控制卡软件驱动由Simulink模块库承担。控制卡功能主要考虑控制的实时性和标准化接口性能,特别要关注Simulink程序运行周期、单点运动最小控制周期、AI和AO精度,以及软件接口、数据传输性能指标,平台选用的控制卡经实际测试满足实验教学的各项指标。
Matlab和控制卡融合技术,可简化控制算法编程和参数调整,实验项目调整无需软硬件二次开发,十分适合实验项目的灵活调整或更新。
2.2.2 直流电机伺服对象设计
直流伺服电机(以下简称电机)是控制系统中普遍应用的控制对象,也是自动化专业必备的实验项目。小负载电机实验多数采用负载同轴刚性连接,不适合变负载实验,使电机实验简单化,而且脱离实际应用[11]。
基于上述状况,本平台对电机采用柔性化设计,构造了双电机皮带传动机械结构(图2),电机通过皮带连接机械负载,机械负载轴可配置多种负载盘组合实现机械变负载,机械负载轴再通过皮带连接发电机,发电机电枢连接电阻实现电枢变负载。皮带传动设计了松紧度可调的变弹性功能,便于开展电机变弹性实验。这种机械变负载、电枢变负载及皮带变弹性功能设计,使电机实验更具真实性、多样性和灵活性。
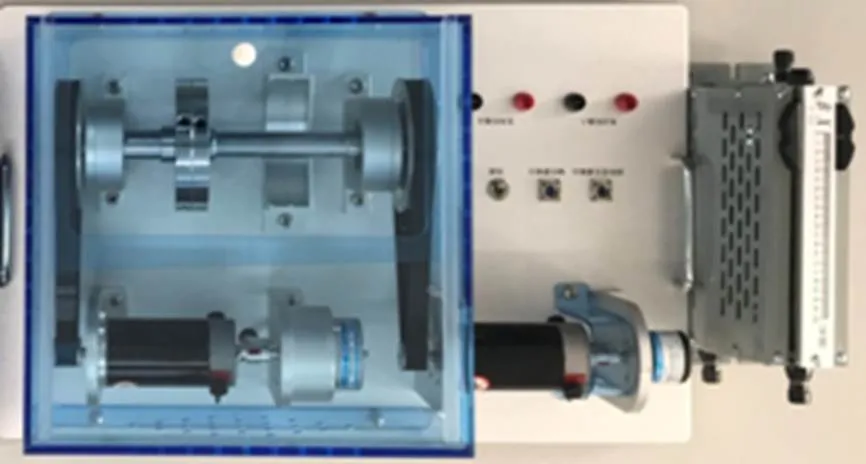
图2 直流伺服电机结构图
2.2.3 平台实验箱设计和制作
控制类实验箱种类很多,比较常见的是电子模拟机实验箱[12],这种实验箱能应用电子器件模拟各种控制对象,但是因实验箱受操作器件数量和软件固化限制,难以展开复杂控制系统实验,且实验内容很难实现灵活的软件更新,此类实验箱更适合基础类的实验,要达到强化 “做和练”的实验要求仍需改进。
本平台实验箱设计需遵循灵活性、多样性及开放性设计理念,重视操作方便和安全防护,注意外形尺寸、美观及颜色,以及制作和维护成本。本实验箱包括控制对象构建区(面包板组成)、模拟和数字I/O接线区、外部对象扩展连接区(外部对象)等(图3)。

图3 核心课实验箱面板图
应用实验箱的标准化外部扩展接口,使平台不仅能连接直流电机,还可以连接外部各种控制对象,如学生独立制作的电子或机械作品,以及舵机、转台、机械臂等,克服了实验对象的单一性,为培养学生制作能力提供了接入条件,方便按需设计实验项目,符合开放式设计理念。
本平台除能接入外部对象之外,还构建了面包板操作环境,学生在面包板上设计和搭建电路来模拟各种控制对象,易于模拟任意复杂的控制对象,拓宽实验项目种类。面包板搭建电路实验过程尽管比较费时,但能接触到许多实用的专业知识,能体验自主设计电路和动手制作过程,便于学生发现和解决问题,通过“做和练”的实验过程,促进学生的想象力和创造力培养。
3 平台实验项目
3.1 理论课实验项目
理论课实验项目主要任务是培养学生掌握控制系统模型辨识、时域法、频率法、状态空间法的实验能力,以及掌握连续、离散及非线性系统的综合实验能力。通过平台对电子线路模拟控制对象的自主设计和制做,强化学生动手能力锻炼;通过复杂控制系统实验,让学生熟悉自动控制系统理论和设计方法,加深学生对理论的理解。具体的实验项目见表1。
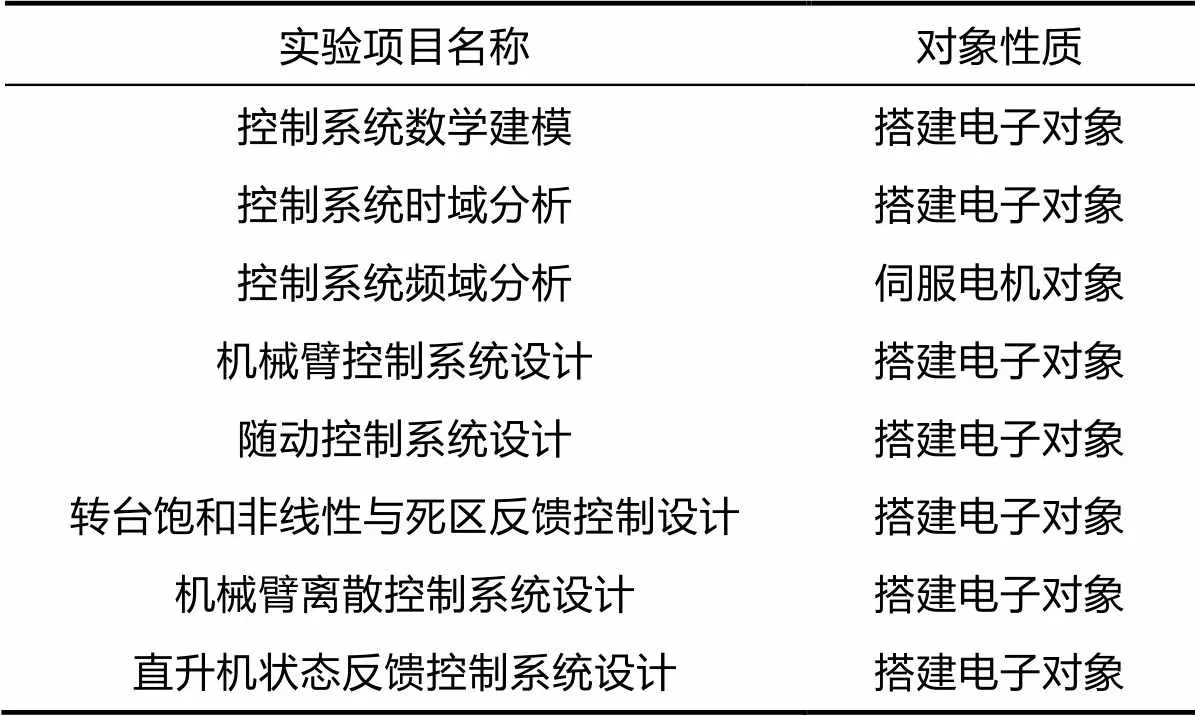
表1 自动控制理论课实验项目
理论课共设计8个实验项目,每个实验项目4学时,除频域分析实验项目采用电机实物对象外,其他项目都需要理论仿真、搭建电子模拟对象和系统设计,这些实验均以实际对象为参考模型,充分体现工程理念,展示理论与实践依存关系。
3.2 实践课实验项目
实践课实验项目要求学生深入理解自动控制元件的属性,增强控制系统分析、设计及实现能力,以动手制做和系统实现为核心,重点关注创新意识和专业知识综合运用能力培养。实践课81%的实验项目在平台上完成,共6个实验项目,具体实验项目见表2。
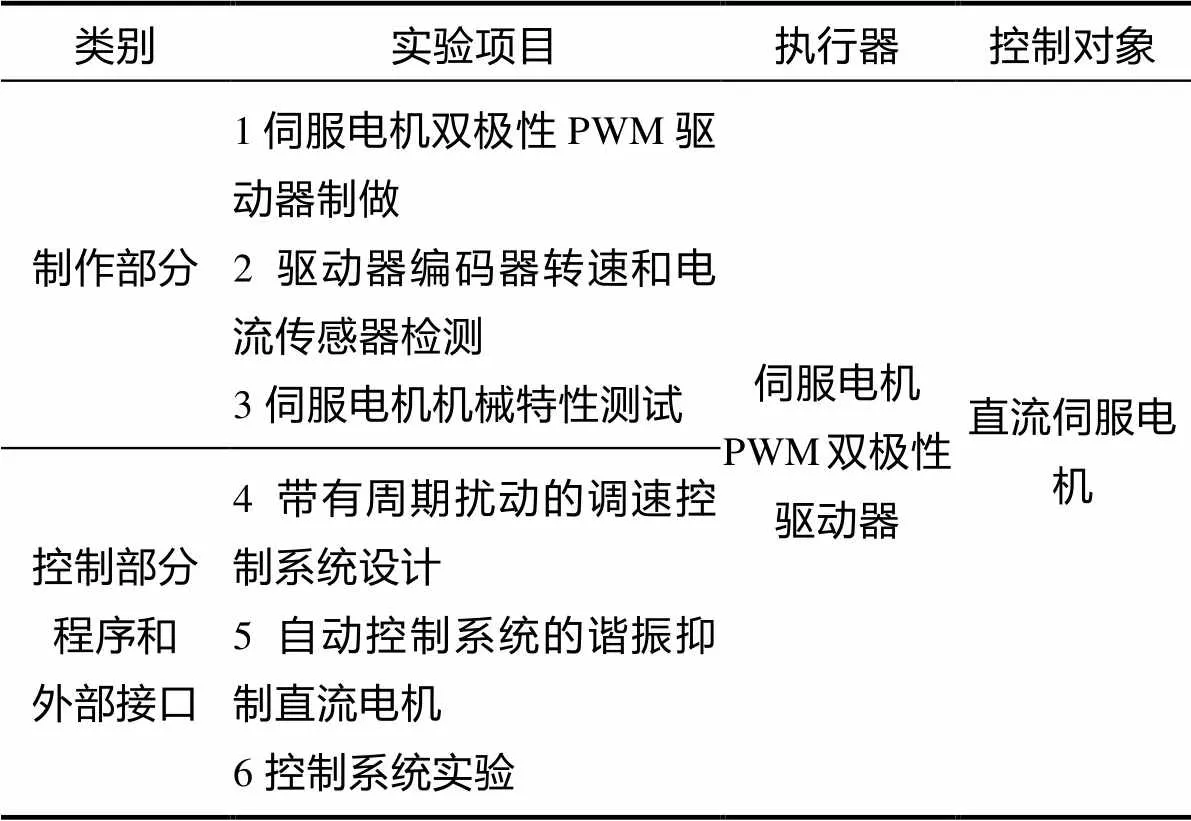
表2 自动控制实践课实验项目
实践课的前4个实验(32学时),要求学生自主设计电路,独立在印刷电路裸板上焊接器件,并完成参数调试,实现对直流电机的双向驱动旋转以及电机特性测试,最终制成电机驱动器作品。学生通过作品制作,提升了电路设计、制作及调试能力。
实践课的后2个实验(18学时),学生将自己的电机驱动器作品接入实验箱外部扩展接口,完成平台Matlab环境下的直流电机控制实验。学生作品在平台上展开实验,将会获得较大的成就感,提升学生实验积极性,为直流电机扰动、谐振及系统实验提供有利条件。
3.3 运动控制课实验项目
运动控制课主要以直流电机、交流电机控制为主,利用本平台的电机控制条件,在平台上开设了双闭环直流调速系统实验和三闭环直流调速系统实验。
运动控制实验教学发挥了平台的拓展功能,扩大了平台的综合应用效率,达到了实验设备优化应用的设计目标。
4 平台实验教学效果及作用
4.1 理论课实验教学效果
在理论课实验中,学生对Matlab理论仿真部分都能较好完成;对在面包板上搭建模拟电子对象普遍故障较多,反映出学生动手能力偏弱;对系统设计中的参数调试都比较生疏,表现出学生缺乏实践锻炼。随着实验项目的由浅入深和逐步展开,学生动手制作电子对象和系统控制参数调试能力明显提升,做和练的教学效果突显。
在学生问卷调查中,学生普遍认为尽管自己搭建电路实验难度加大,但动手能力锻炼效果好,特别是采用电子线路模拟控制对象,受电子线路器件性能差异影响,其模拟控制对象模型与理论对象模型存在较大差异,为系统设计和参数调试增添了许多不确定因素,强化了理论联系实际的重要性认识,增强了系统设计综合能力。学生评价说:这样的实验既锻炼了动手能力,也使我们懂得了理论的落脚之处,充实了我们的工程素养。
4.2 实践课实验教学效果
在实践课实验中,学生独立设计和制作直流电机驱动器是对学生能力的考验,教师在实验过程中的讲解,更能加深学生的理论理解。学生经过电路设计和制作的技术细节(电路原理、器件选取、焊接实现、功能调试等),强化学生制作控制系统能力。采用自己作品完成后续实验更考验学生的制作功夫,让学生不仅会设计和能制作,还会使用,使他们掌握真本事。
从学生反馈中可知,学生感到制作驱动器难度较大,电路设计、器件布局及焊接质量都会影响驱动器性能和实验结果。每个学生都遇到了各种制作问题,通过问题的逐个解决,学生收获颇丰,增强了实践能力,为后续的平台系统化实验打下了基础。尽管学生实验过程快慢不同,最终学生都完成了全部实验,经过这种工程磨砺实验教学,学生系统实现能力快速提升。正如学生所说:这是上大学以来做过的最锻炼动手能力的实验,而不是纸上谈兵。
4.3 平台的教学作用
平台为自动化专业核心课实践教学提供了良好的实验设备,支撑了核心课大多数实验项目;灵活的软件和硬件柔性化设计,利于实验项目的更新与调整;开放式的外部接口,适合接入多种外部控制对象;多用途的设计能支撑更多课程实验。平台的实验环境,便于“做和练”的实验教学设计和实施,符合以学生为中心、自主学习和个性化发展的问题式教学理念。
平台深受学生和教师好评,并在2018年全国高校教师自制实验教学设备创新大赛上荣获三等奖,具有较强的推广应用价值。
5 结语
本平台承担着核心课80%以上的实验项目,从学生电机驱动器制作到面包板电子线路搭建,学生获得了作品的成就感,完成了“做和练”的教学目标。通过Matlab复杂控制系统实验,学生的专业综合能力明显提升。从学生实验过程和反馈来看,实验中需要解决的实际问题大幅提升,问题式教学得到充分落实,促进了学生对理论的深入理解,受到学生普遍好评。平台经过了实验教学检验,并获得2018全国高校教师自制设备创新大赛三等奖,符合以学生为本的教学方向。
[1] 赵纪宁.浅谈对“双一流”建设的认识[J].北京教育(高教),2017(1): 20–23.
[2] 管培俊.新时代中国高等教育的使命[J].中国高教研究,2017(12): 17–19.
[3] 沈毅,宁永臣.从专业建设供给侧结构性改革看新工科建设[J].高等工程教育研究,2018(3): 71–74.
[4] 别敦荣.一流大学本科教学的性质、特征及建设路径[J].中国高教研究,2016(8): 7–12.
[5] 彭熙伟,廖晓钟,冬雷.自动化专业课程教学改革的探索与实践[J].中国大学教学,2016(1): 72–74.
[6] 钱玉恒,杨亚非.基于双轮自平衡小车的创新实验课教学内容设计[J].实验技术与管理,2018, 35(9): 29–33.
[7] 陆国栋,李飞,赵津婷,等.探究型实验的思路、模式与路径[J].高等工程教育研究,2015(3): 86–93.
[8] 王香婷,王雪松.电类本科专业创新人才培养体系的构建与实践[J].中国大学教学,2014(4): 34–36.
[9] 苏信,赵世敏,孙政顺.非线性控制系统运动的实验设计[J].实验技术与管理,2007, 24(3): 28–30, 36.
[10] 何德峰,俞立,徐建明.基于MATLAB的现代控制理论实验教学实践[J].实验技术与管理,2016, 33(3): 123–126.
[11] 董靖川,王太勇,陆钢庆,等.基于Simulink的开放式伺服控制实验装置设计[J].实验技术与管理,2016, 33(9): 126–129.
[12] 何东钢,缪新颖,吴晓雪,等.模拟电子技术实验装置研制与应用[J].实验技术与管理,2017, 34(6): 87–89.
Design and realization of flexible experiment platform for core course of Automation specialty
QIAN Yuheng, YANG Yafei
(Experiment and Teaching Center for Flight Vehicle Control, Harbin Institute of Technology, Harbin 150001, China)
This paper introduces the idea of flexible design and develops the experimental teaching platform of core course from the design of motor variable load, the introduction of the Matlab tool, the construction of breadboard environment, the design of external interface and the production of student motor driver. This platform has the flexible experiment update ability, open external expansion ability and abundant resources of control algorithm. From the feedback information of students, after increasing the content of “Doing and practicing” experiment, the questions in the experiment are enlarged and the problem-based teaching is fully implemented. The platform is well
by students and won the third prize of the National College Teachers’ Self-made Equipment Innovation Competition in 2018.
automatic control experimental platform; DC servo motor; problem-based teaching
TP271;G484
A
1002-4956(2019)10-0106-05
10.16791/j.cnki.sjg.2019.10.025
2019-02-18
黑龙江省高等教育教学改革研究项目(SJGY20180132);2017年第二批产学合作协同育人项目“自动控制实践课程实验教学改革项目”(201702064008);2018年第一批产学合作协同育人项目“自动控制理论课实验教学平台建设”(201801054009)
钱玉恒(1960—),男,吉林省吉林市,硕士,高级工程师,中心副主任,主要从事自动化专业实践教学设备设计与研制。E-mail: qyh323@hit.edu.cn
猜你喜欢
湖南税务高等专科学校学报(2021年4期)2021-08-30
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
中学生数理化·中考版(2020年10期)2020-11-27
甘肃教育(2020年4期)2020-09-11
物理之友(2020年12期)2020-07-16
甘肃教育(2020年8期)2020-06-11
意林(2018年3期)2018-03-02
中国教育技术装备(2016年11期)2016-12-01
