基于自适应逆控制的储能舵机技术研究
2019-10-24 08:14:52王厚浩苏伟杰唐德佳
上海航天 2019年4期
王厚浩,陈 辉,苏伟杰,唐德佳,何 洋
(上海航天控制技术研究所,上海 200233)
0 引言
目前,旋转弹均采用单通道控制,但单通道控制的效率较低,控制精度较差,机动能力十分有限[1]。为了有效拦截高速、高机动低空目标,新一代旋转弹必须具有大过载、大机动等特点,因此对电动舵机提出了更高的要求。储能舵机在常规电动舵机舵面和舵轴间采用扭簧连接,可以极大地减小电机的功率需求[2]。由于储能机构的引入改变了舵机系统的特性,同时系统对指令干扰的响应更加敏感,容易造成储能舵机消耗的能量增大[3]。因此,对储能舵机的特性分析以及控制策略的研究具有重要意义。
电动舵机控制方法主要有经典比例-积分-微分控制(PID 控制)、智能控制、鲁棒控制以及非线性控制等。经典PID 控制算法简单紧凑,实时性好,易于实现,在电动舵机控制器中应用广泛。张元等[4]针对传统控制器响应速度慢、系统参数不易整定、多变量非线性复杂系统存在的时滞问题等,设计了一种改进的模糊神经网络PID 控制器,为电动舵机控制系统快速性、高精度的设计提供了依据。LU等[5]为解决电动舵机负载扰动以及机械结构自身变形等因素带来的不利影响,开展了H∞控制与复合型H∞控制,通过实验对比了不同控制方法的控制效果,实验结果表明复合型H∞控制的鲁棒性较好。刘晓东等[6]提出了一种自适应滑模控制方法,对电动舵机工作过程中的参数变化以及外界干扰等不确定因素进行控制,具有良好的效果。WIDROW 在1986年基于信号处理提出了自适应逆控制理论[7],其基本思想是采用自适应滤波方法辨识出被控对象的逆模型,并将此逆模型作为控制器对被控对象进行开环控制。斯坦福大学斯坦福直线加速器中心(SLAC)在电子束控制中的自适应噪声消除系统中成功应用了自适应逆控制[7]。此外,自适应逆控制方法还被应用在机器人控制、感应电机调速、震动检测、飞机引擎、控制功率摩托车等领域中[7-10]。总的来说,电动舵机控制器的算法每一种都有其优点和针对性,需要根据对象特性选择合适的控制算法。
目前,国内未见储能舵机技术相关研究资料,国外SIRIMARCO 和VAN ZEE 等[2]仅分析了储能舵机的功耗优势。本文依据电动舵机运动学方程,对比分析储能舵机与普通电动舵机的需求电流,结果表明储能舵机耗能更少。在此基础上,考虑增加扭簧导致对象特性变化,本文分析了相同输入条件下,储能舵机与普通电动舵机的输出差异,从而给出储能舵机的输入修正方程,方程中输入指令的修正值与舵偏角速度有关,因此需进行实时修正。
自适应逆控制可使输出完全跟随输入,因此采用自适应逆控制策略可以有效地抑制对象特性变化和指令干扰的影响。本文基于自适应逆控制,并结合旋转弹的指令信息特征,辨识电动舵机控制系统逆模型,降低了算法的复杂度。仿真及试验结果表明,基于自适应逆控制的旋转弹储能舵机无需修正指令即可获得与普通电动舵机相媲美的输出性能,具有很好的跟踪效果,有效地消除了对象特性改变对舵机性能影响。
1 储能舵机系统建模
电动舵机主要由伺服电机、控制器、减速装置、反馈测量元件等组成,电动舵机组成框图如图1所示。
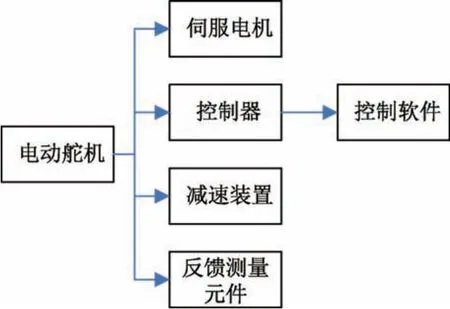
图1 电动舵机组成框图Fig.1 Electromechanical actuator composition block diagram
储能舵机是在传统电动舵机基础上改进形成的,即在舵面和舵轴间增加储能弹簧,以降低舵机功耗,如图2所示。
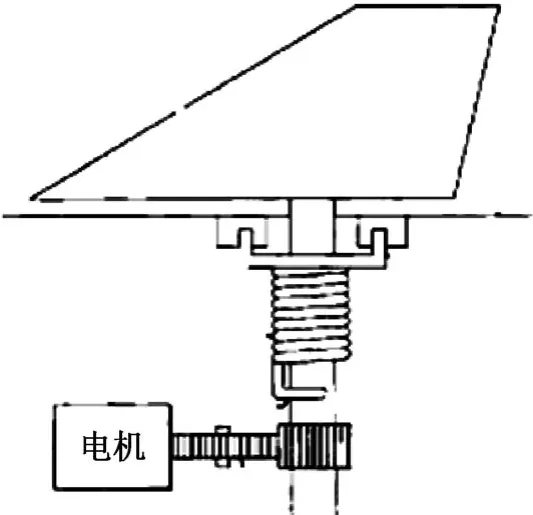
图2 扭簧储能舵机局部Fig.2 Part of torsional spring energy-storage actuator
储能弹簧使得电机驱动舵面在某一方向偏转并存储能量,用以驱动舵面反方向运转,理论上可实现舵面以固有频率反复不断偏转,从而节省能量。合理选择弹簧可以使得系统固有频率和弹旋频率相匹配,刚度系数Ks可以在系统固有频率到额定工作频率之间选取[6]。
电动舵机系统中人为引入限流环节,相当于饱和非线性。储能舵机控制系统的模型框图如图3所示,表明了系统输入R(s)到舵偏角δ(s)的过程。图中:Te为电磁转矩;ω 为电机机械角速度;Kt为电机力矩系数;Jm为电机转子转动惯量;Ud为直流母线电压;Ra为绕组线电阻;La为绕组等效线电感;Ke为反电势系数;Kf为摩擦系数;Ks为储能弹簧的刚度系数;Kem为机电转换系数;e为舵偏角偏差;K为控制器增益;Ua为控制电压;Ea为反电势;I为母线电流;N为传动比;δ为舵偏角。
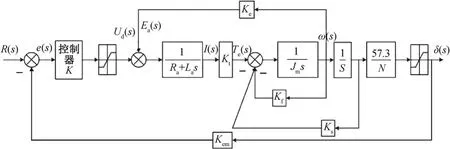
图3 储能舵机系统模型框图Fig.3 Block diagram of Energy-storage actuator system model
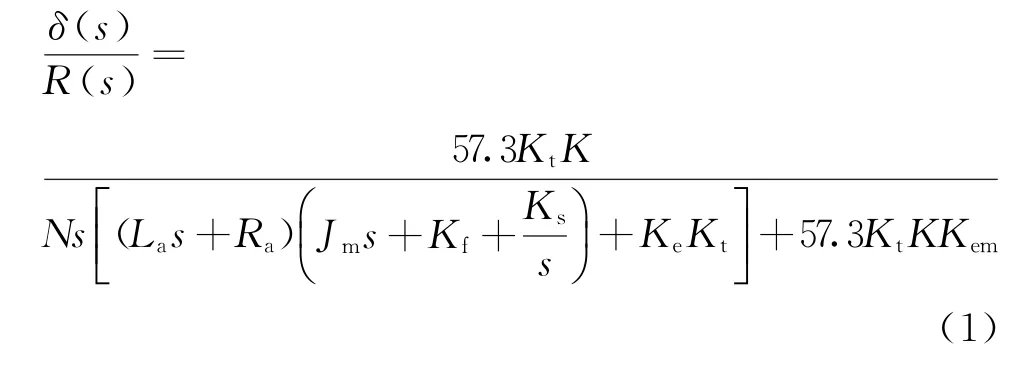
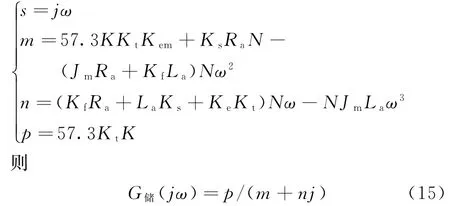
当负载为0时,储能舵机传递函数表示为
2 储能舵机系统分析
2.1 储能舵机节能分析
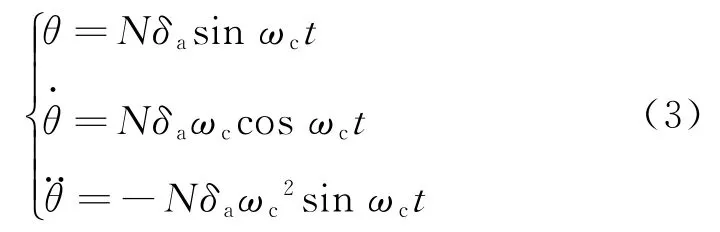
舵机舵偏角δ的运动方程为

式中:δa为舵机运动的最大舵偏角;ωc为舵机运动的角频率;t为运行时间。由舵机传动比N可知,折算到电机轴上的角度θ、角速度和角加速度分别为
空载状态下,根据电磁转矩方程,得储能舵机方程为
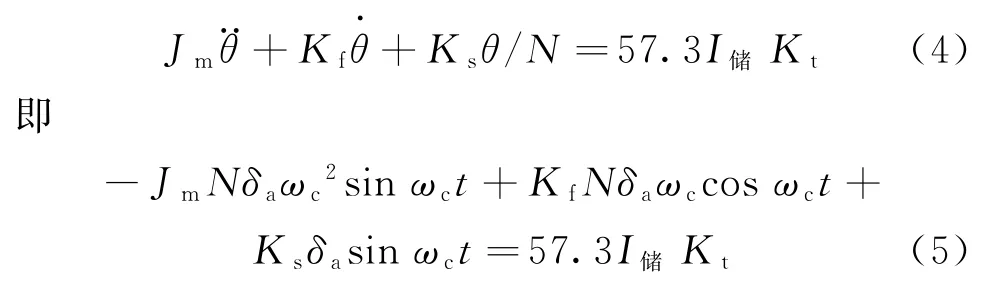
式中:I储为储能电机电流。
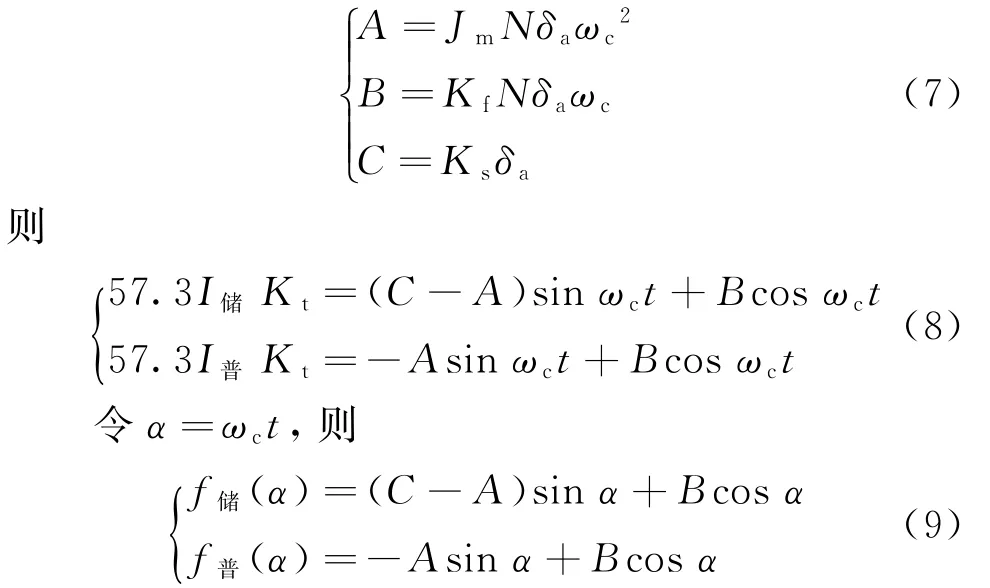
同理,普通电动舵机在相同舵偏角运动状态下的运动方程为

式中:I普为普通电动舵机电流。令
对式(9)求导可知,当f储(α)取最大值时需满足

则f储(α)的最大值为

同理,f普(α)的最大值为

由式(11)~(12)可知,在相同工况下储能舵机与普通舵机最大消耗电流比值为

设计储能舵机时,选取刚性系数Ks=[5],则

若传动比N>0.5,则2A-C>0,此时I储max<I普max。
因此,当传动比大于0.5时(实际传动比大于等于1),舵偏输出角在相同幅值频率的情况下,储能舵机消耗最大电流小于普通舵机,则储能舵机所需的最大输出功率小于普通舵机。
2.2 对象特性变化对舵机性能的影响
根据储能舵机的传递函数模型,令
传递函数的模为

同理,普通舵机的传递函数可表示为

式中:m1=57.3KKtKem-(JmRa+KfLa)Nω2;n1=(KfRa+KeKt)Nω-NJmLaω3;
普通舵机传递函数的模为

由于KsRaN,LaKsNω均为正值,因此

因此,为了获取相同的舵偏输出角特性,储能舵机控制时需要对输入指令进行修正。储能舵机的方程为
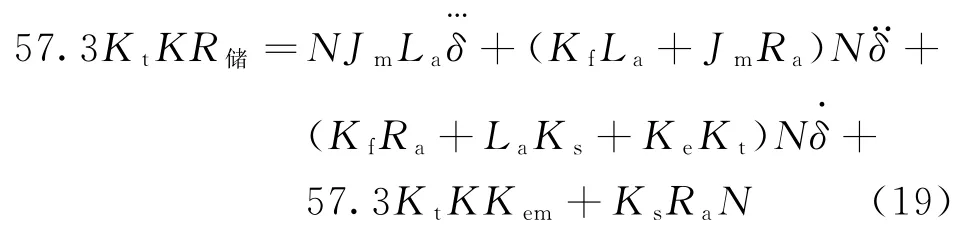
式中:R储为储能舵机输入指 令;为舵偏角δ的一阶、二阶、三阶导数。
同理,无储能弹簧的普通舵机在相同输出下的方程为

式中:R普为普通舵机输入指令。
因此,在相同的输出需求下,储能舵机输入指令的修正值为

3 自适应逆控制
自适应逆控制对对象动态响应的控制采用逆控制的思想,用来自控制器的信号驱动对象。该控制器的传递函数是对象本身传递函数的逆,则控制器与对象的级联传递函数增益为1,使得输出跟随输入,它只涉及开环控制问题,这样的控制是简单、稳定、鲁棒的,而且是精确的[3]。
图4为自适应控制基本概念框图[3]。由储能舵机传递函数可看出,储能舵机系统为最小相位系统,即储能舵机系统具有稳定的逆。
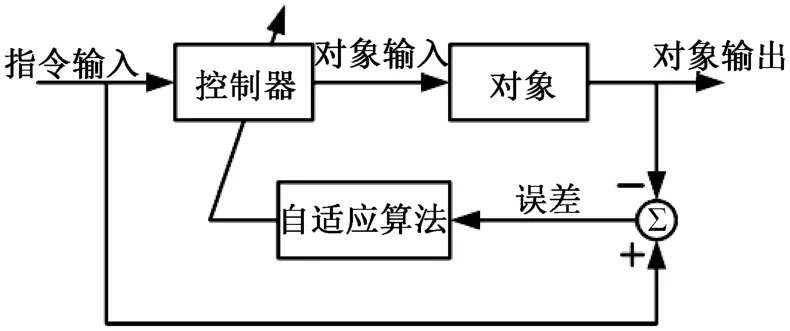
图4 自适应逆控制基本概念图Fig.4 Concept diagram of adaptive inverse control
在线自适应求逆过程算法复杂,需要时间长,因此本文首先根据不同的输入,离线辨识电动舵机建立的模型,结合指令特征,基于自适应逆控制思想,采用自适应最小均方(LMS)滤波器算法构造舵机逆控制器,实现舵机控制。
3.1 舵系统模型辨识
舵系统模型是舵系统逆控制的基础。采用传统的PID 校正方法镇定电动舵机,如图5所示,电流环以伺服电机电流为反馈量,使电机转矩跟踪希望设定值,提高系统低频段的快速性,抑制电流内部干扰和控制电机电流在许可的工作范围;位置环以控制对象的角位移输出为反馈量,以保证系统的稳态精度和动态跟踪性能。系统外环性能发挥依赖于内环优化,各环调节器性能最优化是整个系统高性能的基础。
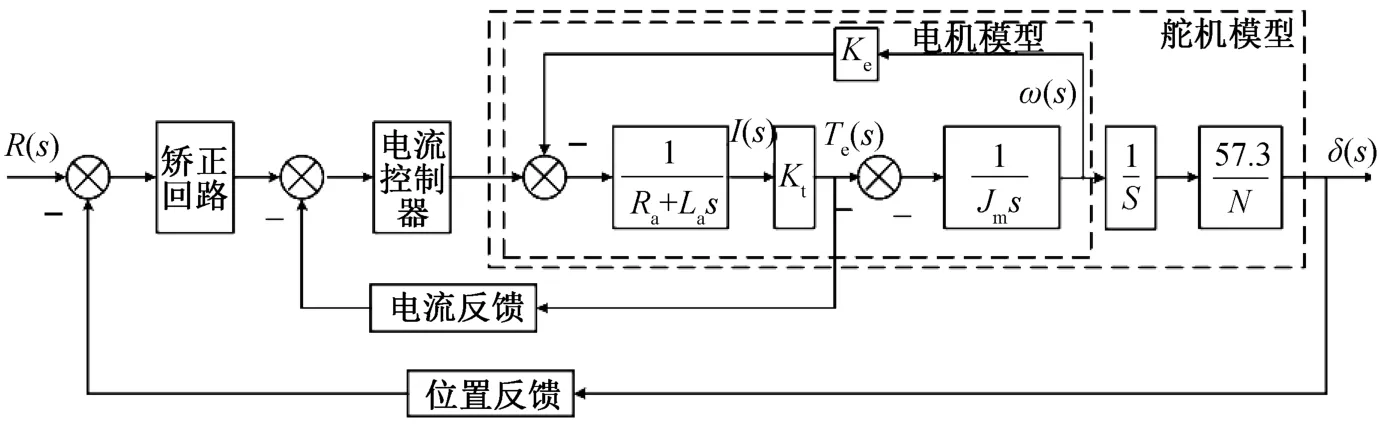
图5 舵系统控制框图Fig.5 Block diagram of actuator system control
储能电动舵系统辨识可采用ARX 模型[8-9]或自适应建模等方法实现,在工程上也可采用专业仪器设备采集频率数据,并采用最小二乘法获得舵系统模型。
3.2 舵系统逆模型辨识
选择电动舵机的参考模型M(z),复制电动舵机模型),结合自适应滤波器,采用LMS 算法,并利用建模信号,离线辨识电动舵机的逆模型C k(z);建模信号为需求的特定的幅值和频率的正弦信号,得到不同输入下的权系数W。
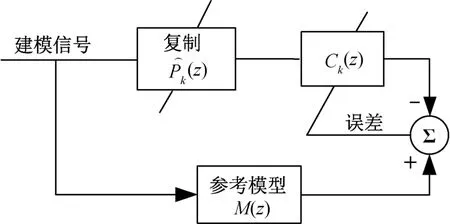
图6 舵系统逆模型辨识框图Fig.6 Block diagram of actuator system inverse model identification
LMS算法是利用测量或估计梯度的最速下降的一种实现,k+1时刻W k+1=W k+μ(-)。其中,μ为收敛因子,真实梯度估计是+N k,它等于真实梯度加上梯度噪声。将单一的误差εk值的平方并进行微分,可以得到粗略的梯度估计,即得到LMS算法为


其中,第k个输入信号向量X k=[x1kx2k…x lk…x nk]T,权 系 数 向 量WT=[w1w2…w l…w n],第k次采样的误差εk为期望响应d k与输出信号y k的差,即

其中,收敛因子μ控制了算法的稳定性和自适应速率。对均值和方差都收敛的一个较强的条件为

式中:trR为R(所有进入权系数信号的均方和)的迹。
3.3 储能舵机控制
在传统PID 控制基础上,获得舵系统模型,结合LMS自适应算法,构造逆模型辨识系统,在线辨识出舵系统逆模型,作为电动舵机控制器。控制结构框图如图7所示。
在线辨识逆模型过程中,为了加快自适应算法收敛速度,根据旋转弹输入指令特征,即依据当前舵指令、舵偏速度以及旋转弹的旋转频率信息,实时建立舵指令模型,如式(26)所示,从而生成自适应算法需要的指令序列,同时将Matlab仿真得到的权值W作为初值,实现在线逆模型辨识,加快收敛速度,使得舵机快速准确跟踪。
基于自适应逆控制的储能舵机控制步骤如下:1)镇定电动舵机;2)辨识舵系统模型;3)在线求逆过程,首先根据指令输入特征确定舵系统模型,其次根据指令输入特征,实时生成舵指令序列,采用自适应LMS滤波器在线求逆模型;4)复制逆模型作为电动舵机控制器。

图7 控制结构框图Fig.7 Control block diagram
4 仿真与分析
4.1 电动舵系统仿真
基于某型电动舵机进行仿真,镇定后的电动舵机离散传递函数为

确定旋转弹弹旋频率为10 Hz,则

储能舵机的传递函数为

采用Matlab仿真获得相同输入幅值条件下普通舵机与储能舵机跟踪性能如图8所示。
仿真结果表明,舵机在弹旋频率工况下,采用自适应逆控制的储能舵机在减小功耗的同时,通过选取合适的收敛因子,克服了引入储能机构带来的缺陷,达到了与普通舵机相媲美的跟踪性能,即基于自适应逆控制的储能舵机对对象特性变化不敏感。
由图8可以看出,在0.25 s以内,基于自适应逆控制的舵机跟踪性能较差。这是由于自适应逆系统训练过程需要一定的时间,因此在实际使用过程中,结合图7,在训练过程中,控制器传递函数为1,当自适应逆控制收敛后,复制逆模型作为控制器。同时为了加快算法收敛速度,结合旋转弹舵机指令特征生成指令序列,采用Matlab仿真得到的权值W,作为LMS算法输入,从而在一个算法解算周期内,实现在线逆模型辨识,使得舵机准确快速跟踪。

图8 相同输入幅值条件下舵机跟踪性能Fig.8 Actuator tracking performance at same input amplitude
4.2 电动舵系统实验
舵机控制DSP采用TMS320F28335芯片,相比于TMS320F2812,其综合计算能力提高了2~3倍,是目前伺服控制领域应用较多的处理器。控制软件为嵌入式控制软件,完成指令接收与遥测数据发送功能、信号处理和控制算法解算功能等。控制软件主要包括初始化子程序、定时中断子程序、数据接收与解析子程序、PID算法子程序以及基于自适应逆的控制器子程序等。控制软件的基本流程如图9所示。基于某型电动舵机进行实验,将输入信号为15°(10 Hz),普通舵机与储能舵机的跟踪情况如图10所示。
由图可以看出,调整合适的收敛因子和滤波器阶数,两种舵机对于旋转弹特定频率下的指令具有很好的跟踪效果。结果表明,基于自适应逆控制方法的储能舵机无需对输入进行修正即可获得与普通舵机相近的控制效果。同时,根据旋转弹的舵系统指令特征,实时生成自适应算法需要的指令序列,该序列经过参考模型作为期望信号,可以有效消除舵指令的干扰。
5 结论
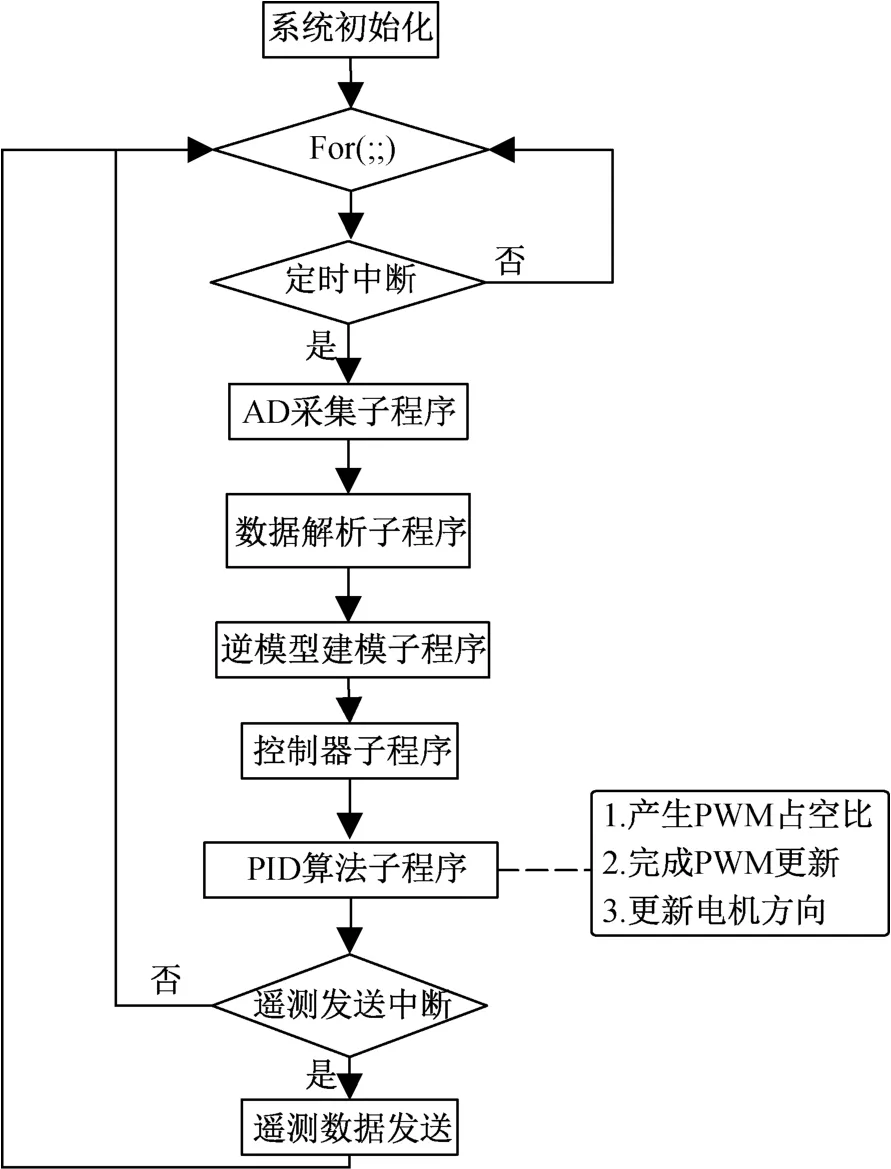
图9 算法实现流程图Fig.9 Algorithm flow chart
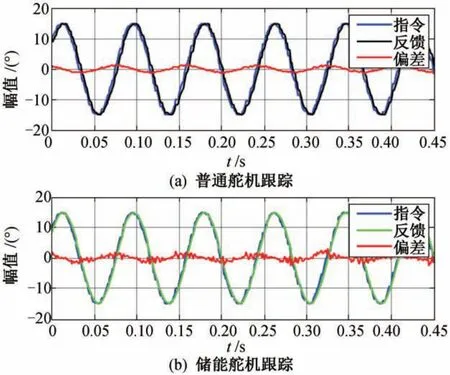
图10 输入信号为15°时的舵机跟踪性能Fig.10 Actuator tracking performance when input signal is 15°
本文建立储能舵机的运动学模型,分析对比储能舵机与普通舵机的电流需求,并在此基础上分析对象特性变化对舵机的影响。分析结果表明储能舵机的功耗小于普通舵机,且在相同输入下储能舵机带宽低于普通舵机。为了获得相同的输出,储能舵机相比于普通舵机需要进行指令修正,本文给出了修正方程。采用自适应逆控制,根据旋转弹输入指令特征,实时建立舵指令模型。仿真与试验结果表明,基于自适应逆控制的储能舵机,无需修正指令,选取合适的收敛因子与滤波器阶数,可获得与普通舵机相同的跟踪效果,同时自适应逆控制的滤波特性可以有效消除舵指令干扰。在实际工程应用中,旋转弹电动舵机的指令信号频率并非固定不变的,对于不同的特征指令,控制算法中的收敛因子应适当的调整,今后将对此进行深入研究,同时结合工程实践进一步分析储能舵机功耗的影响因素,如非线性因素。
猜你喜欢
科普童话·神秘大侦探(2023年1期)2023-05-30 12:48:10
自动化学报(2019年6期)2019-07-23 01:18:36
测控技术(2018年5期)2018-12-09 09:04:26
测控技术(2018年7期)2018-12-09 08:58:46
电子测试(2018年18期)2018-11-14 02:30:34
电子制作(2018年1期)2018-04-04 01:48:14
制造业自动化(2017年2期)2017-03-20 14:26:08
光学精密工程(2016年4期)2016-11-07 09:05:39
舰船科学技术(2015年8期)2015-02-27 15:38:46
电测与仪表(2014年11期)2014-04-04 09:21:20