新能源智慧网联城市客车电器设计方案
2019-10-24 02:19:30罗高华刘孝艳谈琳琳
客车技术与研究 2019年5期
杨 赫, 罗高华, 刘孝艳, 李 潇, 谈琳琳
(北京北方华德尼奥普兰客车股份有限公司, 北京 100072)
目前市场上的新能源智慧城市客车虽然基本实现了数字化[1],但是并没有将全车信息完整地互联互通,使得各个部分数据的应用范围受到了限制,没有充分发挥应有的作用[2]。本文结合相关车辆设计经验和客户需求,综合考虑电器系统设计,论述从数据信息采集到信息互通、图像监控、平台监控各个方面智慧城市客车需要满足的基本要求[3]。举例介绍危险气体监测、驾驶员疲劳驾驶监测和刹车蹄片等设备和系统的闭环控制应用,形成整车一体化控制方案。结合远程监控平台和城市客车调度平台以及数据分析,介绍智慧城市客车在数据分析方面的应用[4]。
1 整车感知数字化
1.1 数据采集
车辆通过使用车载设备集成的霍尔传感器(电流、电压)、压力传感器(气压、胎压)、光敏传感器(光强)、气敏传感器(CO、SO2)、热敏传感器(温度)、红外传感器(图像)等[5],采集车辆各部分信息数据。数据主要分为车辆动力信息、车辆状态信息、内外设状态信息3部分,为智慧城市客车各部分功能实现提供了信息基础。
1.1.1 车辆动力信息
1) 电池状态信息,包含电芯温度、单体电压、SOC、SOH、绝缘电阻、能量回馈电流、总电压、总电流、继电器吸合状态等信息。
2) 电机状态信息,包含转速、电机温度、扭矩、母线电压、母线电流、电机控制器温度等。
3) 其他动力设备信息,包含制动开度、转向、油门开度、油泵、气泵、DCDC、挡位、车速等信息。
1.1.2 车辆状态信息
1) 模块采集信息,包含小功率(≤240 W)输出状态、液位、气压等传感器信息。
2) 配电箱状态信息,包含多功率(≤1 200 W)输出、保险和大功率继电器状态。
3) 其他功能设备信息,包含空调、高压除霜器、电加温锅、散热器、集中润滑、超声波雷达、毫米波雷达等设备信息。
1.1.3 内外设状态信息
1) 安全状态监控,包含危险气体检测、高温报警、烟雾报警、刹车蹄片、胎压、胎温、车门状态等。
2) 监控显示信息,包含360°环视系统、电子后视镜、车内监控、抬头显示系统、中控屏、仪表、路牌等。
3) 驾驶员状态监控信息,包含陀螺仪、驾驶员酒精检测、疲劳驾驶监测、ADAS相关辅助驾驶设备数据。
1.2 信息互通
采用多路CAN总线设计,通过网关、整车控制器和仪表等CAN节点连接,实现车辆信息互联互通,为智慧城市客车提供了信息交互基础[6],如图1所示。

图1 网络拓扑图
1) CAN1:通过网关转发动力相关信息给终端,能够通过远程信息化监控平台实时监控车辆状态信息。
2) CAN2:通过网关转发车辆外设信息,下发调度指令,能够通过远程运管平台获取车辆驾驶员操作、车辆运行状态等信息。
3) CAN3:从车辆左侧前部电器舱经过车辆顶部,到车辆后部电器舱。并联路牌、电视、车内广告屏、前后雷达主机、360°环视系统、烟雾报警等设备。其他CAN线上的信息通过网关广播至CAN3,并将外设信息提取发送。
4) CAN4:从车辆左侧前部电器舱经过车辆前部,到车辆前部右侧电器舱。并联仪表CAN4接口、胎压报警、中控屏、集中润滑、危险气体检测、行车记录仪、疲劳驾驶、道路偏移等控制器在车辆前部的设备。
5) CAN5:从车辆左侧前部电器舱经过车底,到车辆后部电器舱。并联仪表CAN5接口、整车控制器、无线数据终端、EPS、EPB、BMS、空调等围绕整车控制器需要信息互通的动力相关设备。
6) 仪表内CAN:仪表和仪表模块互通,实现开关信号控制。
7) EBS-整车控制器(内CAN1):电子制动分配系统EBS和整车控制器直接通讯,实现制动控制。
8) 电机控制器-整车控制器(内CAN2):电机控制器、挡位器和整车控制器直接通讯。
9) 烟雾报警控制器-烟雾报警传感器内部CAN:传感器和烟雾报警控制器内部信息交换,然后烟雾报警控制器通过CAN3和整车通讯。
10) 充电弓控制模块-BMS内部CAN:充电弓控制模块和BMS直接进行内部信息交换,然后通过CAN4和整车通讯。
11) BMS-动力电池内部CAN:BMS和全车动力电池直接进行信息交换,然后BMS通过CAN5和整车通讯。
1.3 图像采集
通过19路摄像头对车辆和周围环境全方位影像进行采集,为智慧城市客车远程指令的下发和危机预警提供图片和影像基础[7]。
1.3.1 车内影像采集
1) 监控一体机:影像采集区域为前门、驾驶员、前方路况、中门、车厢前部、车厢后部、车顶。能够提供车厢内驾驶区、乘客区和车顶充电弓的视频图像。
2) 客流分析仪:影像采集区域为前门上客区、中门上客区。双目摄像头采集乘客上下车影像,判断人员进出,提供车辆内部乘客人数统计。
1.3.2 其他区域影像采集
1) 电子后视镜:影像采集区域为车外左侧盲区、车外右侧盲区、左侧后方、右侧后方。能够提供视野盲区的影像,尤其在雨天或者光线不好的环境中,能够为驾驶员提供清晰的盲区视野,避免事故。
2) 360°环视系统:影像采集区域为车辆前方、车辆后方、车辆左侧、车辆右侧。在提供各个方位独立影像的同时,还可以提供拼接图像,实现视觉俯视效果,方便驾驶员观察周围环境。
3) LDWS:影像采集区域为前方路况。在高速状态下提供前方防撞预警和紧急情况下的车辆制动,同时当车辆偏离车道线后也能第一时间报警,避免事故发生[8]。
4) 疲劳驾驶系统:采集驾驶员影像。设备提供驾驶员面部图像,抓拍驾驶员打瞌睡,打电话等行为。
车辆运行,当快要发生事故时,会触发报警,相关位置的视频会立刻开始上传或者进行图片抓拍,可以通过平台查看车辆视频信息,避免事故发生后必须找到城市客车黑匣子后才能还原事故真相。
1.4 监控调度
采用车载4G网络终端和远程城市客车调度平台互联,实现车辆信息实时上传,后台下发指令,进行车辆运营调度和车内外人员和环境状态监控,为智慧城市客车提供网路基础[9]。主要设备通过4种通讯线路连接,如图2所示。

图2 监控调度显示设备拓扑图
1) 监控调度主机通过4G网络和调度平台连接,即时下发车辆站牌信息。由车内显示屏、电视、路牌、站节牌、中控显示终端等设备将线路和站点信息显示给车内乘客和驾驶员。
2) 监控调度主机通过灾备记录仪和监控平台连接,实时存储和上传车辆数据,同时当触发报警后上传相关视频。
2 整车控制智能化
在具有了信息采集基础、信息交互基础和视频监控基础后,各部分信息传递和控制实现闭环,可以最大限度地发挥车载智能设备的作用,能够通过互联实现单一设备不能完成的应用场景[10]。
1) 依靠整车互通的CAN总线网络,可以将信息传递给需要的设备和网络平台,设备可以直接判断状态工作,也可以接收平台发送的指令再进行工作,动作后的状态会反馈给设备或者平台,使车辆各部分设备工作状态实现闭环可控。
以车辆危险气体检测设备为例,将气体传感器-危险气体检测控制器-中控屏-仪表-监控终端-车门-整车控制器-远程监管平台等组成整套的危险监控预警和应急网络,为突发情况提供完整的监管控制疏散方案,如图3所示。

图3 车危仪信息传递图
当危险气体浓度达到较高报警等级时,可以通过平台下发指令或者车辆自动锁车不能行驶,同时自动打开车门,语音提示疏散乘客。
2) 车辆组合灯光通过关联一键启动、仪表模块和环境光传感器实现灯光在特殊场景下自动工作。
以灯光迎宾和伴你回家功能为例。迎宾模式目的是在夜晚时,通过远距离操作车辆遥控器,实现车灯按照规定模式点亮,帮助驾驶员观察车辆周围环境,方便上车驾驶操作。伴你回家模式目的是在夜晚时,关闭钥匙后,灯光根据驾驶员是否远离车辆点亮,为驾驶员检查周围环境和回家提供人性化便利。
3) 车辆充电弓通过CAN网络和整车设备信息互通,可以调用一键启动和客流统计采集的数据为自身服务。这样使充电弓获得了感知整车状态的能力,并且进行相应控制。
以充电弓满电自动下电功能为例,当车辆到达充电位置后,开始升弓充电。驾驶员可以直接离开车辆,过程中可以无人值守。充满电后,由电池发送满电信号,充电弓发送升弓信号,同时一键启动判断驾驶员是否在附近,客流统计仪判断车门附近是否有人。整车控制器收到各部分信号后,确定车上无人值守,且车辆满电后,进行下电操作,同时关闭车辆前后门,如图4所示。这样不需要专门值守进行断电操作,可以解放人力。
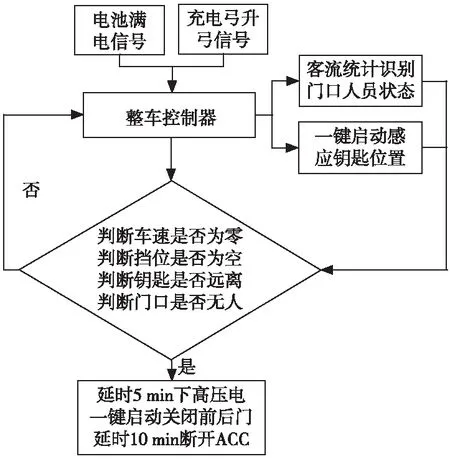
图4 充电结束后自动断电流程图
3 结束语
在车辆信息采集和信息互通的基础上,在5G通信和无人驾驶技术尚不能完全商业化的实际情况下,智慧客车的设计已经能够满足人们出行和运营监管需求。并且随着AR-HUD、激光投影设备、声光雨量控制设备、矩阵大灯和激光大灯等车端设备的应用和手机APP、站台显示等信息互通设备的普及,车辆的自动化和舒适性水平会越来越高[11-12]。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19 02:48:08
汽车实用技术(2022年14期)2022-07-30 06:13:42
汽车实用技术(2022年4期)2022-03-07 06:07:20
汽车观察(2019年2期)2019-03-15 06:00:52
汽车观察(2018年12期)2018-12-26 01:05:46
汽车观察(2018年10期)2018-11-06 07:05:32
北京汽车(2017年3期)2017-10-14 02:15:52
公民与法治(2016年4期)2016-05-17 04:09:26
噪声与振动控制(2015年4期)2015-01-01 07:08:09
客车技术与研究(2014年1期)2014-03-20 14:34:48