一种智能交通管理终端设计与实现
2019-10-23 03:20马新华
微型电脑应用 2019年10期
马新华
(西安航空学院 计算机学院, 西安 710077)
0 引言
目前交通监控管理管理系统,仍然多以摄像头监控为主。这种技术虽然成熟,但造价不菲,且功耗高,也不能保证全方位监控。在机动车驾驶员的管理基本上沿用传统的管理模式,采用人工的方式进行处理。传统模式虽然从机制上比较健全和完善,但由于近年来驾驶员数量的急剧膨胀,道路交通情况的复杂化,车辆性能、类型的更新发展,加之交通管理部门对交通流信息采集的主要方式是感应线圈和视频监测,对车辆信息的采集主要通过人工统计等传统方式来获取,采集到的信息是静态的,覆盖面窄、时效性差[1-2],传统的管理方法已经不能满足管理工作的需要。
本文设计了一种由车载模块、检测基站设备以及智能卡组成的智能交通管理终端,通过在车辆上统一安装车辆电子信息卡(电子车牌)以及驾驶员电子信息卡、在路网建设信息采集基站,将所采集到的信息通过传输线路传递至中心机房。同时利用智能终端设备采集车辆和驾驶员信息,通过射频识别技术实时、准确地进行交通流信息采集,对城市路网进行动态监测,及时掌握道路通行状况,精准掌握城市交通拥堵瓶颈路段、路口的车流状态和车型分布,迅速反馈给交警指挥中心,交警部门再利用各类道路交通诱导系统,将路况信息传递给驾驶员,对相对拥堵的路段进行提醒,引导驾驶员选择流量较小的路段通行,缓解交通压力,减少拥堵现象的发生。智能交通管理终端对数据进行采集,实现自动化传送,上位机通过分析和统计数据,对发送数据不全的车辆可直接进行查处,并对丢失和肇事车辆可直接进行定位,大大提高查找速度。
1 智能交通管理终端
1.1 总体设计
根据应用需求,智能交通管理终端系统由车载模块、检测基站以及智能卡组成。为确保人车绑定,车载模块必须同时检测到驾驶员信息与以及车辆信息卡。绑定数据经检测基站收集后,通过网络通信系统传送到控制中心,采集系统架构如图1所示。
为达到200米内检测200辆车,车速最高为200公里/小时的设计要求,在系统设计时考虑采用4个可用频段和一个公共广播频段,由此可计算出每个车辆的平均检测时间为72 ms。SI4432的传播速率为100 kb/s,则在72 ms时间内,用于传输信号的时间为40 ms,用于冲撞等待的时间为32 ms,则40 ms一共可传输500个字节,对于SI4432,相当于发送速度为每ms发送12.5个Byte,完全可以传播完成全部的信息。
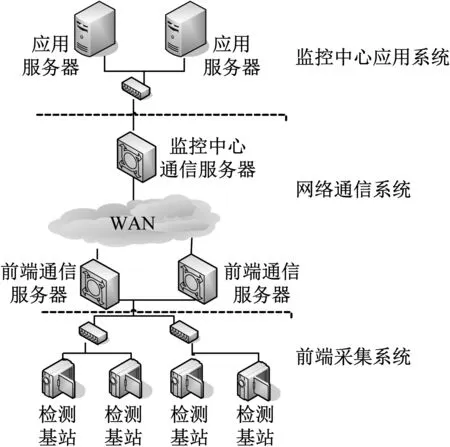
图1 智能交通管理终端采集系统架构
车载终端的集成安装在车上,考虑车速以及周围环境的影响,车载终端必须满足功耗低,穿透力强,发射速率大,辐射范围广等特点。车载终端的总体设计如图2所示。
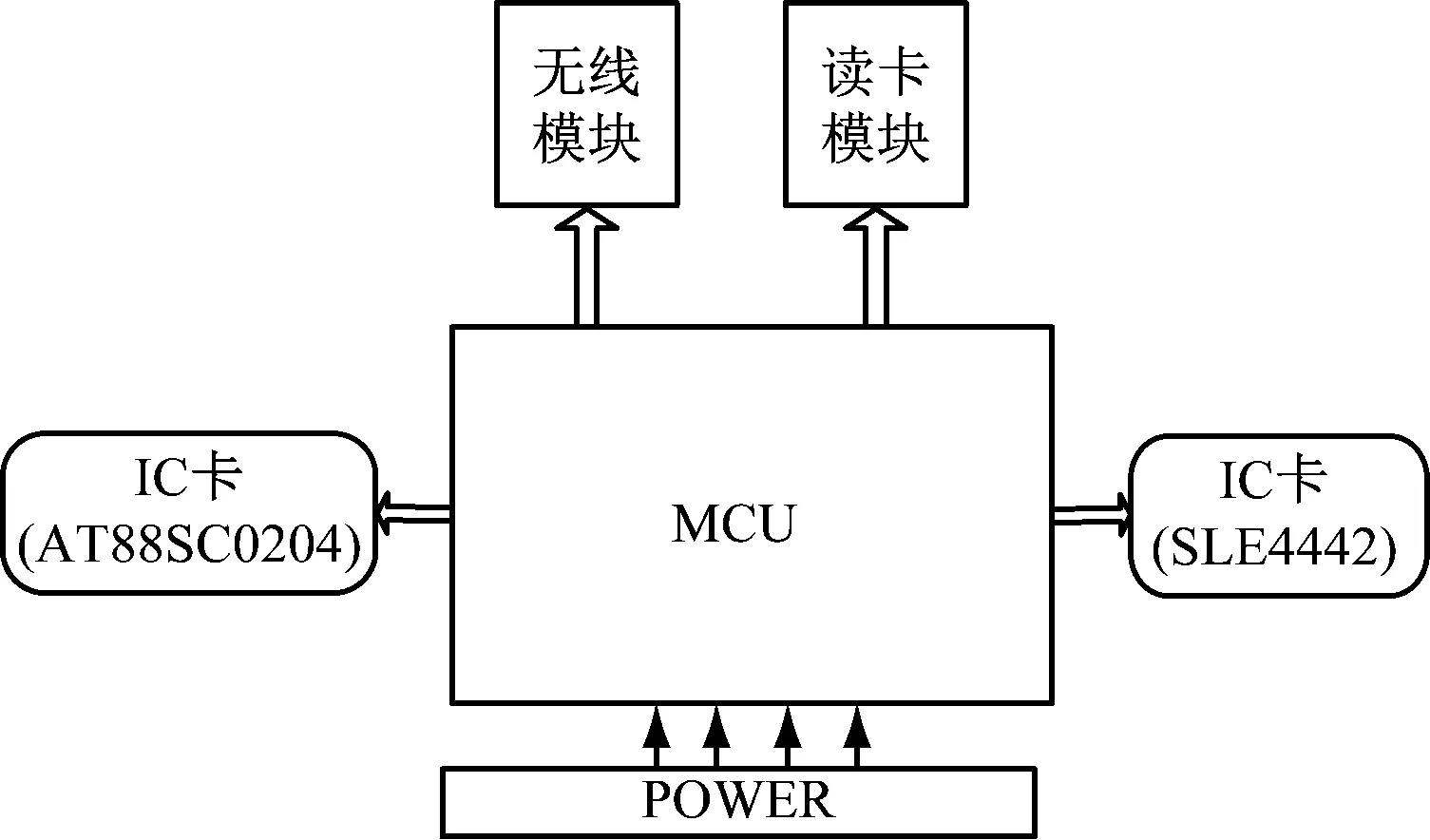
图2 车载终端的总体设计图
射频卡SLE4442[3]读卡电路,由于读卡电路主控器STC12LE5A60S2的工作电压3.3 V,但是读卡器SLE4442压是5 V,由于两端电压不匹配,导致单片机的控制管脚不能直接控制读卡器,为了解决此问题,采用双向转压芯片SN74LVC1T45进行转压后,单片机就可以直接对SLE4442进行控制。电路设计如图3所示。

图3 SLE4442读卡电路
1.2 车载模块
车载模块安装在车辆上,当驾驶员信息卡和车辆信息卡插入车载模块时,车载模块开始工作,当车辆驶过检测基站使,车载模块与检测基站之间建立通讯,将驾驶员信息和车辆信息发送给检测基站。
MCU控制模块采用c8051f930芯片,主要完成两张识别卡(车辆信息卡、驾驶员信息卡)的读取,无线通信模块协议处理、通信模块控制,电源管理模块控制,用户界面控制这五大功能。
车载终端所选取的主控芯片为STC12LE5A60S2,相比较其他系列的单片机芯片,STC12LE5A60S2的工作电压仅为3.3V,功耗较低,且由于带有硬件SPI,便于对外设读写。
无线发射模块采用SI4432芯片,接受控制模块的控制,主要完成无线射频信号的接收发射,调制/解调,信道选择,同步提取,无线信息纠错,收发信息缓冲等功能。
读卡模块主要是根据控制模块的需求读取卡片信息。
智能IC卡采用基于ISO7819-3标准的SLE4442芯片,为防止驾驶员信息卡在中途被拔掉或者替换掉,选用可接触式SLE4442 IC卡智能卡使用的SLE4442 IC卡,主存储器容量为256 K,保护区为00H-20H,其余为应用区。此卡可以在省电的情况下完成卡片识别和读取功能。SI4432是一种中远距离的无线通信设备,在433 MHz频段下最远传输距离可达上千米,相对于蓝牙、WI-FI、ZigBee等传统短距离无线通信技术,SI4432具有传播距离远、功耗低、传播速率大 、抗干扰能力强等优点,同时带有逻辑加密功能,必须经过密码验证后才可擦除。在使用中,如果此卡连续输错三次,则此卡自锁,不能对其进行读写。车载模块结构如图4所示。

图4 车载模块结构图
2 检测基站设计
检测基站包含一个广播信道和4个接收信道。终端通过无线电路监听到广播信道的信息,自动发送给基站,基站通过4个不同频率接收信道来接收信息,并把接收的信息通过CAN总线[3]发送给STM32总控制器后转交给服务端。
基站信号接收电路的总体设计如图5所示。

图5 基站总体电路设计
根据实际需求,检测基站要满足速度不大于200 KM/H;车辆与检测基站间距大于200 M;采用本地电池供电;待机时间大于180天;以及包含LED灯指示,包括电量、未插卡、通信指示等工作状态指示。
检测基站可提供1-4个检测通道,如图6所示。
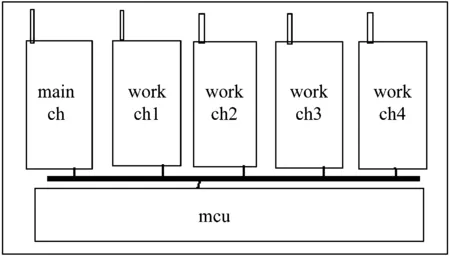
图6 检测基站结构图
每个通道无线通信设计参数如下:射频频段VHF 410~420 MHz;发射功率10 dbm;接收灵敏度-80 dbm;传输速率9 600 bps以上;频偏大于1 k;占用带宽小于30 K;
检测基站由主控板、信道板以下模块组成:
主控板完成基站系统的控制功能,采用arm,crotex-m3系列的32位单片机STM32F103RBT,使用uart总线和各无线信道板连接。
信道板包括射频模块和信道处理单片机,完成与车载模块的交互功能,并将车载信息通过uart总线传回主控板。
射频模块采用和用户模块相同的sI4432,信道处理采用和用户模块相同的c8051f930。为减少主控处理器的压力,将无线底层控制和基本通信处理在信道板内部完成,以使系统结构和模块化明晰。
检测基站无线接收选取SI4432,内部主控制器选取ARM Cortex-M3内核的STM32F106VE6[5]。
在一个由CAN总线构成的单一网络中,理论上是可以挂载无数个节点[6],同时CAN总线的传输速率最大可达1 Mbit/s,有利于实时控制,在CAN节点出现错误的情况下,相对于串口、RS485总线传输会进行校验并退出,保证总线上的其他节点不受影响,同时CAN总线具有低成本、较高的总线利用率、传播速度可达1 Mbit/s、传播距离远以及可靠的处理检错机制等优势,因此基站内部传输选用CAN总线传输。如图7所示。
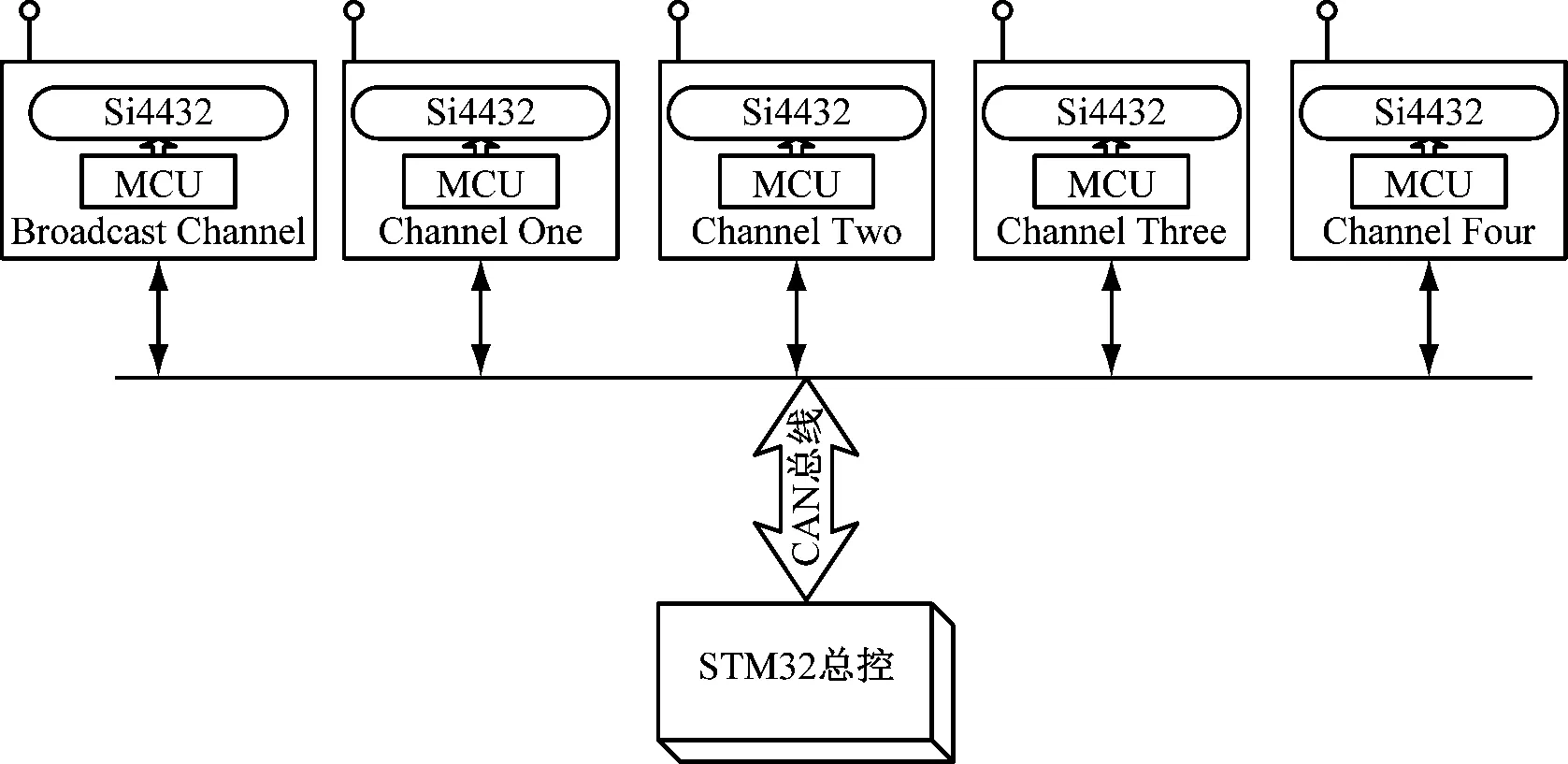
图7 检测基站CAN总线框图
3 防碰撞协议的设计
软件设计主要包含有无线发送的防碰撞协议和CAN模块的传送协议,由于SI4432不支持以上MAC协议,且为了确保发送过程的可靠性,发送端需要应答信号以确保发送信号已被准确接收,需要设计基于ACK的双向CSMA/CA通信机制。总体流程图如图8所示。
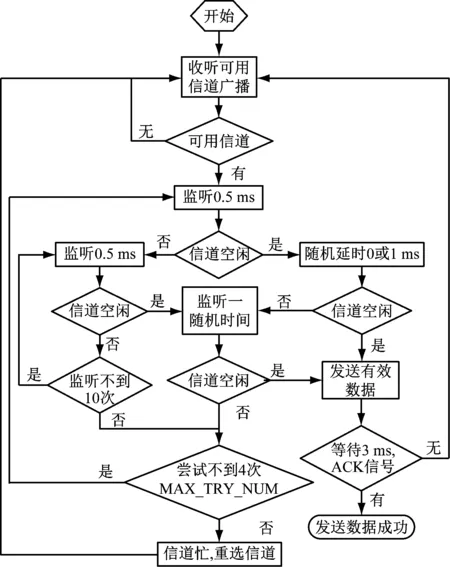
图8 防碰撞协议流程图
防碰撞协议主要代码:
si4432_SetRSSI(); //打开帧同步检测
for (i=0;i<10;i++) //尝试发送
{
if ((send_ready == 1) )//信道不忙
{
send_ready = channel_isidle(rand()%2); //随机延时0~1MS
for (j=0;j<4;j++)
{
if ((send_ready == 1))//还不忙则发送数据
{
si4432_CloseRSSI();//发送完毕之后关闭帧同步检测
}
}
4 监控中心的设计
Qt-Project(LGPL v2.1)[7]是国际开源社区力推的跨平台图像库,系统库小巧灵便,使用完全免费。支持Windows,Linux,嵌入式Linux,MacOS等多种操作系统。使用面向对象的高级语言C++开发,为系统的运行效率提供了良好的保证。另外,Qt还支持Javcscript、XML方便功能扩展。其本身也对一些通用控件与算法提供了模块化的实现,使用Qt可以在较短的时间内完成监控中心软件的实现,高效率而低成本。此外,Qt亦支持嵌入式系统,可以在只修改很少量代码的情况下将目前的系统移植至嵌入式终端内,方便以后的移动功能扩展。
监控中心主要包括信息栏、历史信息以及信道编号,如图9所示。
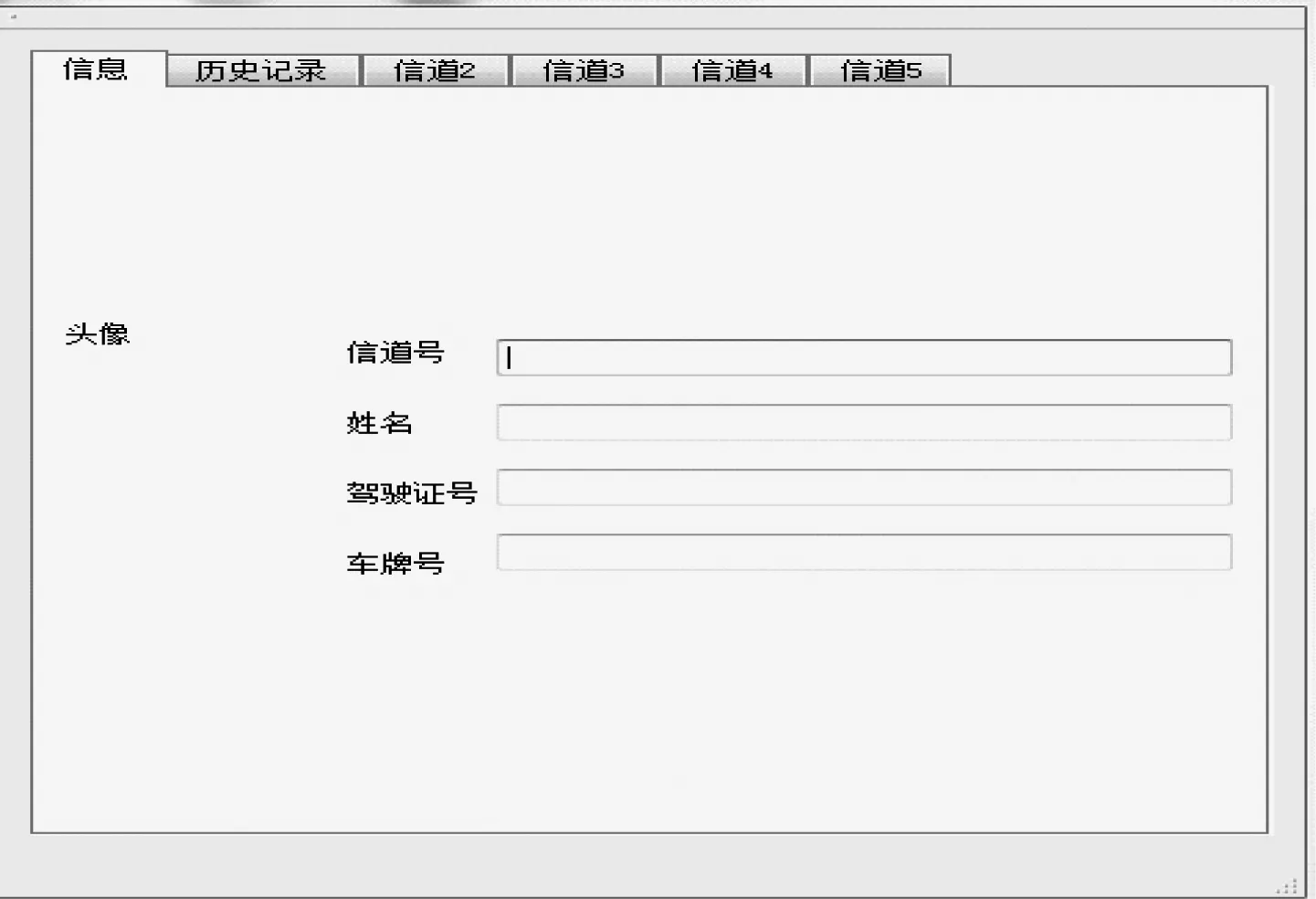
图9
信息栏主要是对发来的单条数据进行细分,把驾驶员的图像,上行信号的信道号,驾驶员姓名,驾驶证号码以及车牌号显示出来。
历史信息栏主要是对历时数据进行统计,按照发送时间降序排列,以便对历史数据进行查看。
信道2,3,4,5为接收信道,主要是对每个信道发送出的信息进行显示。假设是信道2发送出来的信息,在信道2栏也可以找到发送上来的信息。
5 智能交通管理终端测试
智能交通管理终端能否正确实现功能主要依赖于无线通信模块能否正确传送信息给基站,这是影响系统的最为重要的因素,首先我们将车辆信息和驾驶员信息分别写入两张不同的卡中,然后让终端进入基站覆盖范围,一旦进入覆盖区域卡面就会发送信息给基站,基站接收到信息之后会传送给上位机及监控中心,并与写卡信息对比来测试终端是否能够达到设计要求。
经过系统反复的测试和完善之后,如前所述系统基本上实现了预期的设计目标,分别进行测试后,结果如下:
写入信息:
1.驾驶员信息卡:姓名:李娜 驾驶证号:562586
2.车辆信息卡:车牌号:陕A25645。
显示信息如图10所示。

图10 测试图
6 总结
智能交通管理终端可以实现对驾驶员的管理、通过对车辆基本信息的采集,系统能够全面实现车辆精准识别、路网动态监测、道路管制、假套牌车、黑车、盗抢车辆稽查、肇事车辆逃逸追查、车牌防伪等方面的系统化、数字化和信息化等功能,但还存在着定位不够精准,道路状态不能实时显示等不足,这也是下一步进行研究的方向。
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
中国新通信(2022年4期)2022-04-23
火控雷达技术(2021年2期)2021-07-21
汽车维修技师(2019年7期)2020-01-16
恋爱婚姻家庭·青春(2019年9期)2019-12-10
恋爱婚姻家庭(2019年26期)2019-09-14
汽车维修与保养(2019年3期)2019-06-19
雷达与对抗(2018年3期)2018-10-12
北京航空航天大学学报(2017年3期)2017-11-23
探索科学(2017年4期)2017-05-04