增程式电动汽车动力系统匹配研究
2019-10-21 09:41周正勇高震李研
汽车实用技术 2019年11期
周正勇 高震 李研
摘 要:针对增程式电动车的动力系统参数匹配和控制策略问题,文章采用AVL CRUISE软件进行仿真与分析,完成动力系统的参数匹配和对纯电动混合型动力系统控制策略进行验证。
关键词:增程式电动汽车;参数匹配;控制策略;仿真
中图分类号:U469.7 文献标识码:A 文章编号:1671-7988(2019)12-08-04
Abstract: In order to solve the problem of parameter matching and control strategy of powertrain in extended-range electric vehicle, the article uses AVL CRUISE software to simulate and analyze, carry out the parameter matching of the powertrain system and verify the control strategy of pure electric hybrid system.
Keywords: extended range electric vehicle; parameter matching; control strategy; simulation
CLC NO.: U469.7 Document Code: A Article ID: 1671-7988(2019)12-08-04
前言
增程式電动车是一种生产成本较低、续航里程长的新能源汽车。车辆主要以电能为能源,大部分时间工作于纯电动模式,在电池能量不足的情况下,使用混合动力模式延长续驶里程。增程式电动车是发展纯电动汽车过程中一种很好的过渡车型[1-3],对于缓解能源压力和改善生态环境而言具有重大意义[4]。
1 车架总成设计
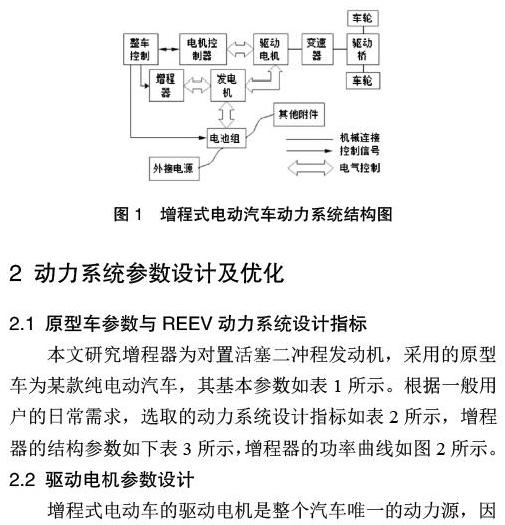
增程式电动汽车动力系统结构如图1所示,电机与车轮通过变速器和驱动桥机械连接,车轮所需的驱动力全部来自电机。增程器单元发出的电能根据工作模式不同,对电机直接驱动,并将多余的电量为动力电池组充电。增程式电动车有外部电源接口,可以对电池组进行充电。电量充足时,动力电池单独驱动车辆前行,当电量消耗到一定值时,发动机才开启。
2 动力系统参数设计及优化
2.1 原型车参数与REEV动力系统设计指标
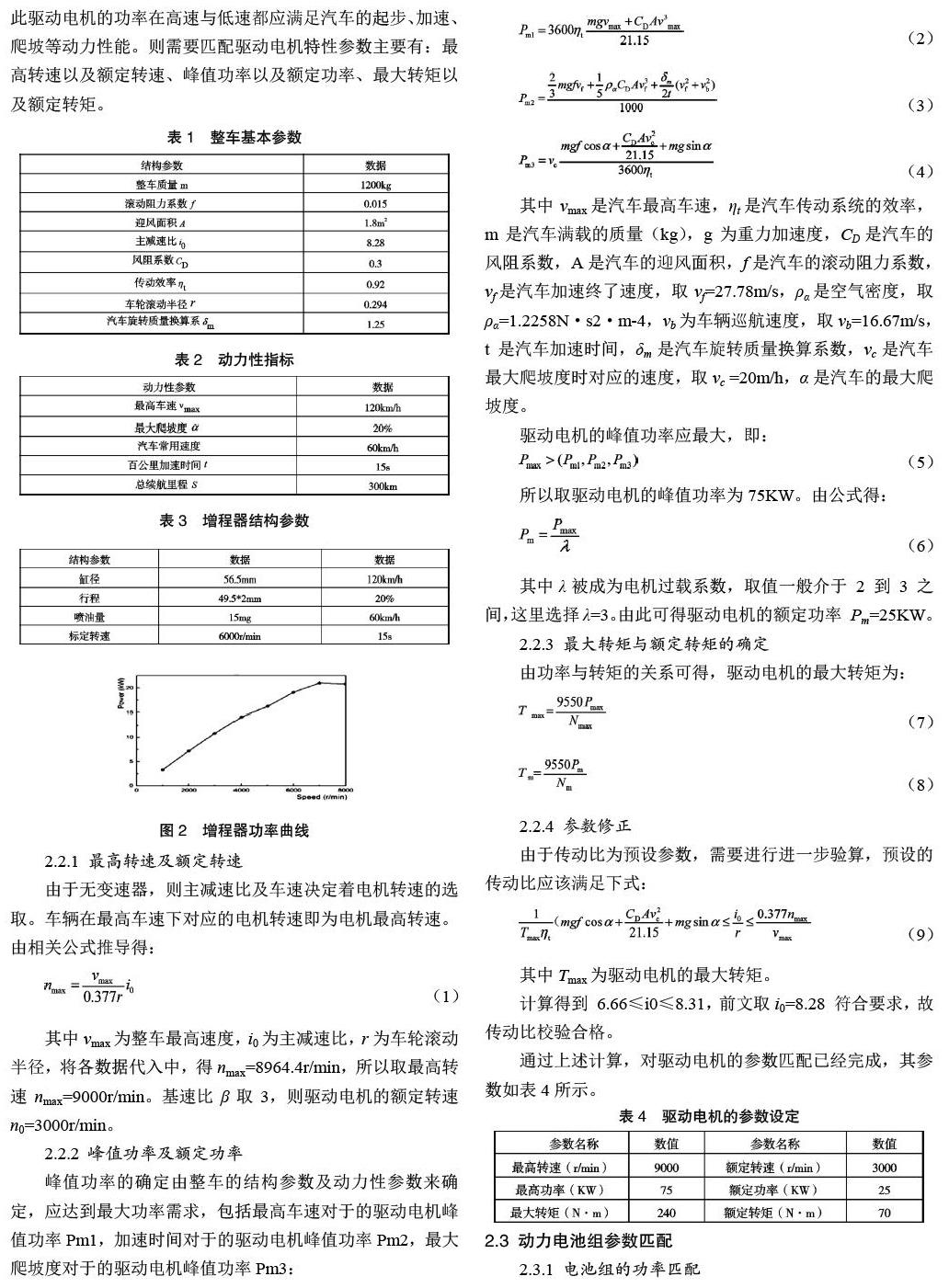
本文研究增程器为对置活塞二冲程发动机,采用的原型车为某款纯电动汽车,其基本参数如表1所示。根据一般用户的日常需求,选取的动力系统设计指标如表2所示,增程器的结构参数如下表3所示,增程器的功率曲线如图2所示。
2.2 驱动电机参数设计
增程式电动车的驱动电机是整个汽车唯一的动力源,因此驱动电机的功率在高速与低速都应满足汽车的起步、加速、爬坡等动力性能。则需要匹配驱动电机特性参数主要有:最高转速以及额定转速、峰值功率以及额定功率、最大转矩以及额定转矩。
2.2.1 最高转速及额定转速
3 增程式电动汽车整车仿真分析
采用 AVL CRUISE 软件对整车进行建模仿真,对整车的动力性及续航里程进行分析。
3.1 动力性结果分析
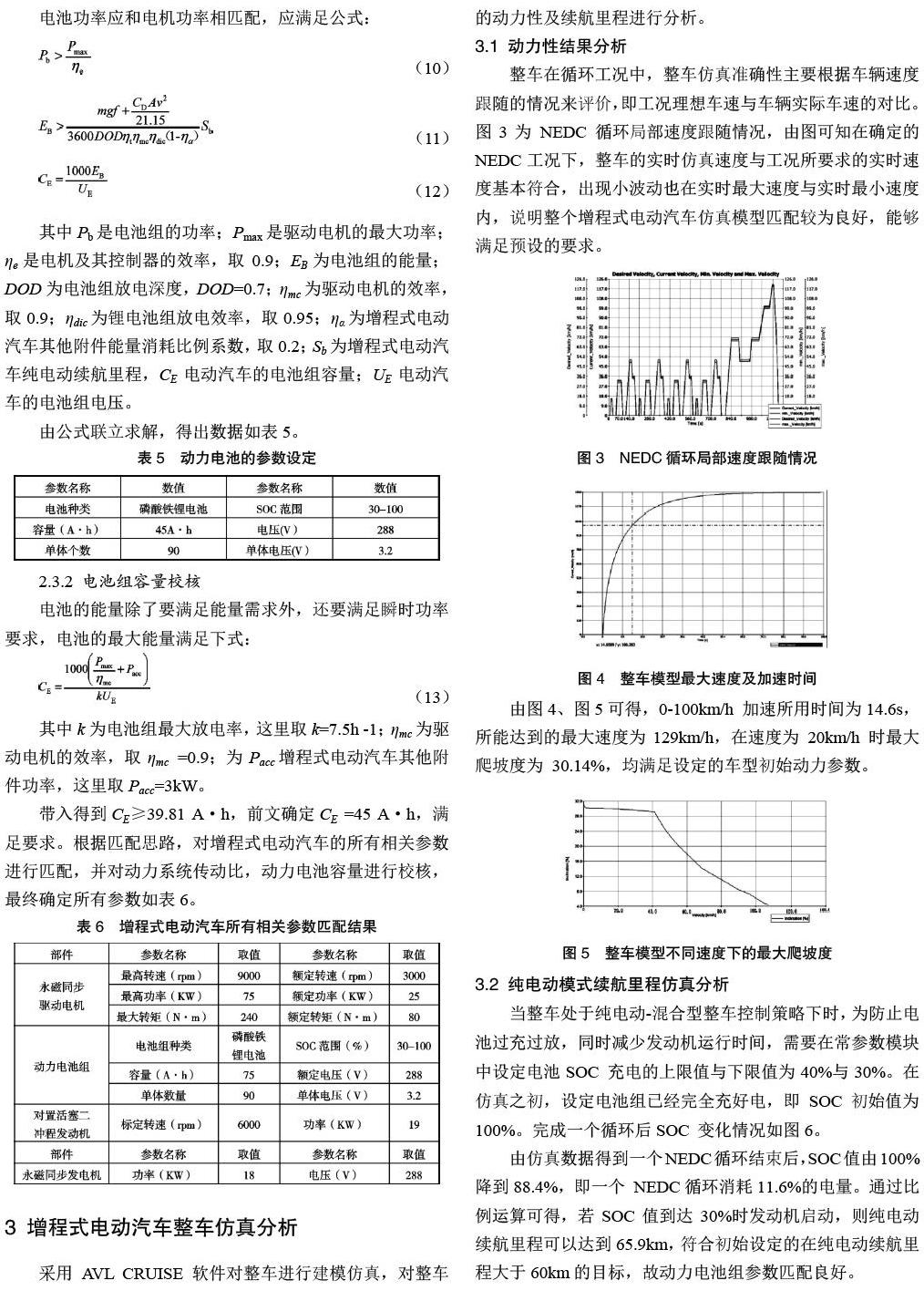
整车在循环工况中,整车仿真准确性主要根据车辆速度跟随的情况来评价,即工况理想车速与车辆实际车速的对比。图3为 NEDC 循环局部速度跟随情况,由图可知在确定的NEDC工况下,整车的实时仿真速度与工况所要求的实时速度基本符合,出现小波动也在实时最大速度与实时最小速度内,说明整个增程式电动汽车仿真模型匹配较为良好,能够满足预设的要求。
由图4、图5可得,0-100km/h 加速所用时间为14.6s,所能达到的最大速度为129km/h,在速度为 20km/h 时最大爬坡度为 30.14%,均满足设定的车型初始动力参数。
3.2 纯电动模式续航里程仿真分析
当整车处于纯电动-混合型整车控制策略下时,为防止电池过充过放,同时减少发动机运行时间,需要在常参数模块中设定电池SOC 充电的上限值与下限值为40%与30%。在仿真之初,设定电池组已经完全充好电,即SOC初始值为100%。完成一个循环后SOC 变化情况如图6。
由仿真数据得到一个NEDC循环结束后,SOC值由100%降到88.4%,即一个 NEDC循环消耗11.6%的电量。通过比例运算可得,若SOC值到达30%时发动机启动,则纯电动续航里程可以达到65.9km,符合初始设定的在纯电动续航里程大于60km的目标,故动力电池组参数匹配良好。
3.3 纯电动-混合型动力系统控制策略的验证
为使增程器系统尽早启动使整车进入混合型控制策略,现将动力电池组的 SOC 初始值设定为40%,SOC 上限值与下限值仍设为40%与 30%,同时发动机的期望转速为6000 r/min。建立循环工况任务,基于5个NEDC循环工况的基础上,计算得到如图7的动力电池组SOC实时数值。由图7可以清晰地发现当动力电池组的SOC值达到下限值30%时,电池组进入充电过程,即增程器系统启动,发动机与发电机已开始运转,当到电池组的 SOC值达到上限值40%时,增程器系统则停止工作。
图8为发动机的实时数据,通过图8可以发现增程器系统启动及关闭良好,发动机转速及功率均非常接近期望值,每个循环内发动机启动总时长为406s。
图9显示的车辆实时走行距离,未出现较大波动及异常数据,表明增程器系统、电池及驱动电机工作正常,同时表明纯电动混合式整车控制策略可以准确的控制车辆参数。
4 结论
(1)根据增程式电动汽车整车的结构参数、增程器的结构参数及整车的动力性指标,对动力系统进行参数匹配。
(2)分析增程式电动汽车的工作模式,确定增程式电动汽车动力系统的控制策略为纯电动-混合型控制策略。
(3)根据参数匹配结果和选择的控制策略,在AVL CRUISE中搭建整车仿真模型,对整车的动力性进行了计算分析,仿真结果表明,整车动力性基本满足设计目标要求,并且控制策略能够很好地执行。
参考文献
[1] 邱利宏.微型纯电动汽车动力系统优化匹配及仿真研究[J].上海汽车,2013(9):3-7.
[2] 朱鹏飞,赵文杰,许宏云.基于CRUISE纯电动汽车匹配计算与仿真[J].上海汽车, 2012(9):11-15.
[3] 姜立标,吴斌,冯骁,等.电动汽车动力性参数的仿真设计与试验验证[J].汽车工程,2011,33(12):1013-1017.
[4] 龚贤武,吴德军,马建,等.增程式电动汽车动力系统参数匹配与仿真研究[J].机械科学与技术, 2014, 33(6):929-933.
猜你喜欢
交通科技与管理(2022年9期)2022-05-24
中国典型病例大全(2022年7期)2022-04-22
内燃机与配件(2022年2期)2022-01-17
电子乐园·上旬刊(2021年7期)2021-07-19
电机与控制学报(2018年9期)2018-05-14
电子技术与软件工程(2016年24期)2017-02-23
科技资讯(2016年18期)2016-11-15
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03