Vericut下5轴机床构建
2019-10-21 07:03康义
科学与财富 2019年35期
康义
摘 要:随着数控加工在全球各领域的广泛深入的应用,加工零件的大型化、复杂化、高精度化在不断提高,数控加工程序随之也越来越复杂 ,如何保证数控加工程序合理性与正确率是每个数控程序编程人员面临的现实难题。所以,虚拟仿真技术应运而生,作为先进制造技术的关键辅助技术之一,其广泛的应用,也成为有效提高数控设备利用率、减轻编程人员劳动强度、大幅提升数控加工综合技术水平重要手段。
关键词:Vericut软件;5轴机床;建模
引言: Vericut软件是美国CGTech公司开发的基于Windows及UNIX系统平台,在计算机上专用于数控加工仿真的软件,它采用先进的三维显示及虚拟制造技术,对数控加工过程的模拟达到了极其逼真的程度,并且能模拟机床的运动过程和虚拟的工厂环境。该软件的仿真效果好,功能强大,其应用的范围越来越广泛,尤其是在航空企业中,已经将Vericut软件做为数控加工必用辅助软件。
1、Vericut的两种机床构建方式
机床模型构建可以采用两种方式,一是使用Vericut软件下自带的简单建模方法,这种建模方式只能构建的机床组件,而且建模功能简单、灵活性差。如果机床的结构较为复杂,则需要应用三维建模软件建立出机床的模型,而后导入Vericut软件下相对应的组件结构下,构建出机床模型。
目前,能够进行三维建模的软件有很多,如CATIA、UG、MasterCAM等都可以进行三维建模,使用此类软件建立机床的模型后,可以通过软件提供的接口程序将建立的模型转存为Vericut软件能够识别的类型文件。
2、Vericut机床构建流程
2.1建立機床运动组件拓扑结构
要建立VERICUT机床模型拓扑结构必须先了解机床各轴之间的相互运动关系及相关参数。尤其是5坐标机床,各组件之间相对位置关系相对复杂,转动中心之间的偏置、转动中心轴线到主轴轴线的偏置和转动中心到主轴端面的距离,这些参数尤其重要,参数的正确与否直接决定仿真结果的真实性。
根据机床的运动部件进行结构拆分,对于三坐标机床,基本上可以将机床的结构拆分为X轴向运动部件、Y轴向运动部件、Z轴向运动部件以及其余的如换刀部件、电气控制部件、冷却系统等辅助部件。而对于五坐标机床,则是增加了A轴、B轴、C轴等转动轴的对应部件。部件拆分的目的是确定相互之间的运动连接关系,此关系具体的体现是在仿真软件下组件结构树的建立。对于复杂的机床结构,单存的使用X、Y、Z、A、B、C等六个运动轴不能完全的对机床的运动过程进行仿真,因此在Vericut软件下又增加了U、V、W、A2、B2、C2等六个相同的控制轴,并且可以将运动组件设置为不同的子系统号,以便于更好的控制各个组件的先后运动顺序。
2.2 机床组件结构简化与建模
在实际的仿真过程中,并不是将所有的运动细节都进行仿真,仅需要对部件的移动过程进行仿真即可。实际上,所有被仿真的部件的运动过程都经过了简化,而对于整体运动仿真影响较小的部分运动过程省略, 结构简化一是可以减少建模的工作量,二是能够提高仿真软件的运行速度,因此满足功后的合理的结构简化是必要的。明确机床各组件的拓扑关系并进行运动过程简化后,精确测量各组件几何尺寸,用三维建模软件建模
2.3 机床结构树构建
组件结构树建立的目的是为了确定再仿真软件下各个部件的相互运动关系,其建立的关系需要符合实际的机床运动关系,否则仿真的结果不一定是正确地。
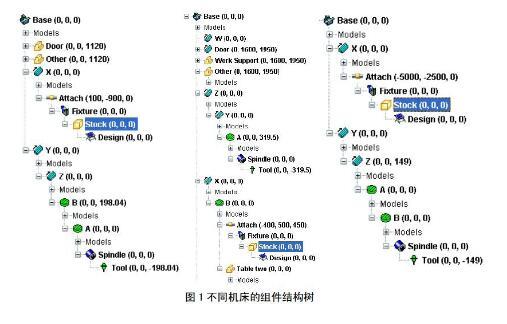
初始的组件树窗口内没有任何组件,仅有Base(基础)、Attach、Fixture(工装)、Stock(毛坯)、Design(设计零件),这5项内容对于所有的仿真文件都是需要的,而且Base的位置不能移动,是组件树建立的基础,其余的所有组件都是建立在Base基础上,其相当于机床的地基。在此基础上,将需要的运动部件加入,对于三坐标机床,一般增加X、Y、Z等运动轴即可,但是需要确认三个轴之间相互的运动及支撑关系。如X轴单独运动,Z轴
在Y轴上运动等。依据不同的机床运动关系,建立的机床组件结构树也是不同的,如图1所示。
所有的组件结构树都有一个共同点,即Attach组件都是关联在运动工作台组件上,即如果工作台是B轴,则Attach组件在B轴下,如果X轴为工作台,则Attach组件在X轴下,这是因为工装、毛坯等实物在实际中是安装在工作台上进行加工的,因此在组件结构树中,Attach组件一定处于工作台所在的组件下。
另外,在建立组件结构树时,尽可能的将主要运动部件(X轴、Y轴、Z轴、A轴、B轴、C轴)放在最开始的部位,其余的运动轴在其后。
2.4 添加机床组件模型
组件结构树建立完成后,需要将对应的机床模型导入至Vericut软件下。在组件结构树上对应的组件上双击,选择MODEL界面,选择对应的组件模式Model File,既可以将各个组件的模型导入至Vericut软件下。
在Vericut软件的6.0以上版本,可以将CATIA软件建立的机床模型直接导入至Vericut软件下使用(需要购买相应的模块),或者将CATIA软件建立的机床结构模型转换为STL文件,然后导入至Vericut软件下。
2.5 控制系统设置
设置好数控机床的组成和结构后,机床还不能动。还需配置操作系统。Vericut软件提供的控制系统的能涵盖市面上绝大多数的机床,但是有很多时候,其软件提供的控制系统中有些指令功能与实际的机床不吻合,因此需要针对各自不同的机床要求,对控制系统通过宏指令功能进行局部修改,以使得机床仿真的动作与实际的运动过程相同。
2.6 运动仿真
组件的模型导入后,需要验证建立的机床结构是否正确,一般通过Vericut软件下的MDI模式进行验证。如果各个部件的运动都合格,则机床模型构建工作已经完成。
小结
Vericut目前是功能较为强大的数控加工仿真软件,本文结合本人实际应用的经验,概述了五坐标机床构建的基本方法。希望本文能对初学者有一个方向指导性的作用,在明确基本的机床构建流程后,进一步深入研究,挖掘Vericut更为强大的功能。
参考文献:
[1]Vericut数控加工仿真技术 杨胜群 清华大学出版社 2010
[3]Vericut数控加工仿真技术与应用实例详解 郑贞平 机械工业出版社 2015
猜你喜欢
中国设备工程(2022年12期)2022-07-11
能源工程(2022年2期)2022-05-23
重型机械(2020年2期)2020-07-24
装备制造技术(2019年12期)2019-12-25
制造技术与机床(2019年2期)2019-03-06
制造技术与机床(2018年9期)2018-09-19
制造技术与机床(2017年11期)2017-12-18
制造技术与机床(2017年9期)2017-11-27
海外华文教育(2017年6期)2017-08-07
水电站机电技术(2016年1期)2016-02-28