基于MATLAB的直流调压调速控制系统的仿真
2019-10-17 05:48周子健张飞
中小企业管理与科技 2019年26期
周子健,张飞
(1.内蒙古科技大学,内蒙古 包头014030;2.鄂尔多斯电业局,内蒙古 鄂尔多斯014010)
1 引言
本文的设计主要建立在双闭环系统的理念之上。该系统是近期来说同种类型的系统当中,应用最为广泛的系统。其有着很多比别的系统更加出色的优点,例如,与其他系统相比,其动态响应更快、抗干扰能力也更强[1]。双闭环直流调速系统在很多行业都有应用,由于直流电动机的起动制动性能较为优秀,可以非常顺畅地调节速度,因此,本文采用这种系统来设计直流调压调速控制系统。
2 直流调压调速控制系统的设计
2.1 本文所述系统的总设计
本文所述系统采用的是普遍使用的三相桥式整流电路,所设计出来的直流调压调速控制系统具有能够无静差调速、系统稳定等优点。
2.2 本文所述系统的组成和设计
本文所述系统原理的框图如图1所示。
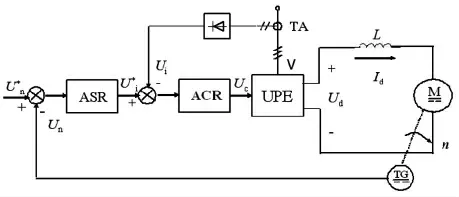
图1 系统原理框图
本文所述设计需要令系统实现转速的负反馈和电流的负反馈,因此,本文为了实现这两个机制,在设计的系统当中设计了两个分别用来调节电流和转速的调节器。把调节电流的调节器放在了稍靠内部的部分,把另一个调节器放在了外部。这两个调节器一内一外,共同组成了双闭环调速的系统。
2.2.2 电流调节器的设计
本文设计当中的一些相关数值,整流装置滞后时间常数Ts=0.0017s;电流滤波时间常数Toi;三相2 桥式电路的每个波头的时间3.3ms。
为了使系统能够更平稳地工作,这些数值应该遵守公式(1~2)Toi=3.3ms,根据此公式,可以计算得出Toi的数值,即为0.002s;根据上述数值,可以求出电流环小时间常数的和,用T∑i符号来表示。根据计算得出T∑i=Ts+Toi=0.0037s。接下来需要计算出电磁时间常数的具体数值,其用Tl符号来表示。根据之前所得出的数值可以求出电枢回路总电感,具体公式为:Ll=K1随后便可以根据公式得出Tl的值
2.2.3 选择电流调节器的结构
根据本文的设计要求,要保证σi≤5%,除此之外,还要尽量维持稳态电流没有静差,所以根据以往设计,本文的设计可以采用典型I 类型系统来设计上述提到的电流调节器,根据其他要求,具体使用的为PI 型。该种类型的传递函数是WACR(s)
2.2.1 电流截止负反馈系统
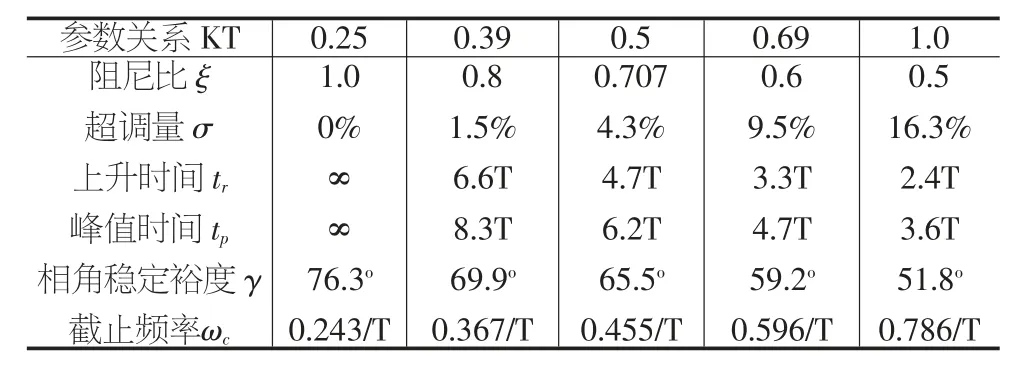
表1 典型I 型系统动态跟随性能指标和频域指标与参数的关系
2.2.4 计算电流调节器的参数
本文所述系统还需要计算出ACR 比例系数,具体计算的过程如下:
由 τi=Tl=0.0182s;KITΣi=0.5可以计算出=135.1×0.0182×0.56/(36×0.024)=1.594,即为ACR 比例系数。
3 基于MATLAB/SIMULINK的调速系统的仿真
在进行完上文所述的各个设计过程之后,可以利用相关软件对设计出的系统进行仿真工作。需要建立起相关的动态数学模型,将已经求出来的数值代入就可以得到动态模型。
为了分析本文设计出的模型的特性,需要在两个调节器的输出端设置相应的限幅值,根据本文的设计的模型的相关数值,选取的限幅值是±13V。选取完数值之后,就可以正式对本系统进行仿真。
根据仿真结果,可以非常直观地看出系统中转速的变化,根据仿真结果的数值,可以计算出转速的超调量100%=1.67%。
这个数值表示所设计出的系统的仿真结果在大体上满足了最初设计的要求,但是与理论计算相比,还是有一定量的误差。例如,在0.9~1.3s,系统出现了扰动现象,但在出现之后的很短一段时间之后,转速又达到了稳定的状态。这就是本系统设计的两个调节器在起作用,因此,此次仿真基本满足设计的要求。
4 结语
本文设计出的系统在进行仿真实验之后被证明是符合要求的,因此,对于不同的能够应用到本系统的场景,相关人员可以根据具体情况作出适当的调整,使办事效率更加迅速。
猜你喜欢
煤气与热力(2021年7期)2021-08-23
煤气与热力(2021年6期)2021-07-28
煤气与热力(2021年6期)2021-07-28
四川大学学报(自然科学版)(2021年1期)2021-01-26
重型机械(2019年3期)2019-08-27
电子制作(2019年23期)2019-02-23
电机与控制学报(2018年8期)2018-05-14
西部资源(2017年5期)2018-02-23
海峡科技与产业(2017年12期)2018-01-18
现代计算机(2017年4期)2017-03-29