黑水虻养殖装置翻转器的优化设计
2019-10-16 01:04李慧琴刘存祥郭艺豪段留奎王佳兵
饲料工业 2019年17期
■李慧琴 刘存祥 郭艺豪 段留奎 王佳兵
(河南农业大学机电工程学院,河南郑州450002)
黑水虻是一种优质的蛋白饲料原料,黑水虻饲料营养成分全面,其价值与鲜鱼、鱼粉及肉骨粉相近甚至略高[1]。使用后,动物免疫力增强,生长速度加快并且增肉系数更低,节省饲料。黑水虻幼虫便于人工饲养,他的饲养简单易管理、食物广泛、适应性强、产出率高、省工省时[2]。幼虫的饲养物料主要使用动物的粪便、剩菜剩饭和腐烂的蔬菜水果,一只幼虫每天可分解2~3 kg腐败物。幼虫的成长环境需要通风透气,恒温恒湿且幼虫具有避光性,需要不定时对物料进行翻转疏松[3-4]。翻转器实现养殖物料的充分翻转,是整个养殖装置的核心部件。
本文简述一种黑水虻幼虫养殖装置。可自动控制养殖区域的温度和湿度;自动上料、卸料和翻转物料;实现小规模养殖的自动化与高效化。本文采用ANSYS/LS-DYNA 分析方法,对此养殖装置的关键部分翻转器进行数值模拟分析,对比研究两种不同形状翻转器的工作过程,观察其翻转过程中物料的运动与应力变化。
1 翻转装置整体结构
全自动黑水虻幼虫养殖装置由上卸料模块、翻转模块和环境控制模块三部分组成如图1 所示。上卸料模块实现物料的进入和排出。翻转模块主要由翻转器、电动推杆、支架结构组成。翻转器的周期移动将幼虫处理后的物料从底部翻转至物料表面,同时将未分解的物料翻转至底部与幼虫充分接触。环境控制模块主要由光源、温度、湿度传感器及通信单元组成。

图1 黑水虻养殖装置结构
2 翻转器的仿真
根据翻转器的结构特点,利用ANSYS/LS-DYNA进行翻转器工作过程的仿真试验[5-10],观察翻转器的稳定、物料翻转效果、应力集中、幼虫的损伤程度,最终得出结论为翻转器的优化设计提供参考依据。
2.1 有限元模型的假设
针对翻转器对物料的翻转过程,提出以下有限元假设[11-12]:
①不考虑翻转器的磨损与变形,假想为理想刚体材料。
②物料假设为质地均匀的无限体积材料,其间无颗粒状不均匀物质。
③翻转器运动过程平稳,速度恒定。
2.2 建立模型
翻转器设计主要考虑两个方面的因素,一是尺寸合理,可在养殖箱内移动的同时对幼虫的损伤最小;二是工作面曲线形状合理,对物料翻转良好的同时工作阻力小,消耗的功率最小。根据使用要求,在SOLIDWORKS中进行建模,设计了两种翻转器模型,分别为铲型翻转器和铧式犁翻转器[13-15],如图2、图3所示。

图2 铲型翻转器模型
2.3 网格划分
对翻转器采用四面体网格划分自动生成网格[16-17]。铲形翻转器模型共划分网格51 626 个,其中翻转器362个,物料模型51 264个,如图4所示。铧式犁形翻转器模型共划分网格36 178 个,其中翻转器648 个,物料模型35 530个,如图5所示。

图3 犁型翻转器模型
2.4 定义约束与施加工作条件
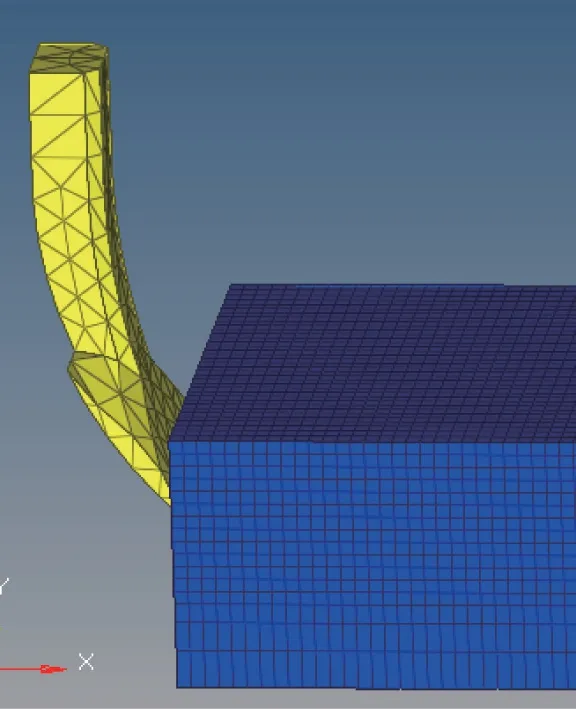
图4 铲型翻转器网格划分图
对于此物料翻转模型,使底部完全约束并使翻转器只能沿翻转方向前进,分别约束物料底面的六个自由度和翻转器的5 个自由度。本文使用有限的物料模型模拟较大的模型,对此在物料的三个非工作面施加无反射边界条件,减少应力波反射对仿真过程的影响[18-19]。选择翻转器的工作速度为3 m/s,选择cm、g、μs单位制,即在280 000 μs完成整个翻转过程。
2.5 定义材料
假设翻转器为刚体[20],主要参数如表1所示。

图5 犁型翻转器网格划分图

表1 翻转器材料参数
物料与土壤性质相似,但其黏度高于普通土壤,本文选用PLASTIC KINEMATIC(003)材料本构模型[21],其材料参数如图6所示。

图6 PLASTIC KINEMATIC(003)材料模型参数
2.6 定义约束
本接触采用ERODING_SURFACE_TO_SURFACE,将动摩擦系数设置为0.2,静摩擦系数设为0.3,根据仿真试验条件设定时间步长、终止时间等控制卡片参数。接触属性卡片如图7所示。
2.7 餐厨垃圾模型确定

图7 接触属性卡片
FHWA SOIL(147)模型仿真在翻转初期,餐厨垃圾部分网格发生畸变,并且随着时间的增加,网格畸变越来越严重,直至整个仿真模型发生破碎。DRUCKER PRAGER(193)模型仿真可模拟餐厨垃圾翻转后的剩余模型效果。但由于此材料模型抗压强度较大,允许的网格变塑性变形较小,在材料达到失效准则时就被删除,无法看到餐厨垃圾翻转后的效果。PLASTIC KINEMATIC(003)模型仿真可有效的观察到被翻转餐厨垃圾的翻转效果,验证受力状况,具有良好的仿真效果。
3 仿真结果分析
3.1 翻转性能的比较
铲型翻转器不同时刻的翻转效果如图8所示,犁型翻转器不同时刻翻转效果如图9 所示。两种翻转器都完成了对物料的剪切、抬高、扭转、抛翻四步。不同之处在于铲型翻转器物料沿铲面剪切滑移,铲面形成两面楔,对物料进行横向推动和翻转,物料沿铲面堆积,达到一定程度后大部分沿翻转器上升,少部分从翻转器侧面滑失,容易形成堆积,影响翻转器行进速度,没有达到均匀翻料的需要且对幼虫的损伤严重。铧犁形翻转器物料沿犁铧剪切滑移上升,由于犁铧与犁壁的三面楔作用,物料到达犁壁后发生扭转与抛翻,同时完成了抬高、侧向推动与翻转。因犁铧设计与运动方向具有一定的角度,故其切入和分离性能良好,物料被均匀抛翻在翻转器运动路线两侧,翻转器行进速度平稳且对幼虫损害极小,工作效果优秀。

图8 铲型翻转器翻转过程
3.2 翻转器受力分析
铲型翻转器应力云图如图10 所示,从应力云图中可以看出,铲型翻转器在切入后,铲面前方物料应力逐渐集中,随着物料堆积到达最大体积时应力到达峰值,随后瞬间降低,进入下一个应力周期。工作期间物料应力变化较大,翻转过程不稳定,容易形成震动,对幼虫损伤严重,对推杆刚度要求高。同时铲子受力较大,磨损快,对材料要求高,工作条件恶劣。

图9 犁型翻转器翻转过程
犁型翻转器应力云图如图11 所示,在犁形翻转器应力图中,由于犁铧的切入与分离作用,从进入过程到稳定工作过程应力变化较为缓和,无明显的周期性波动,翻转过程平稳,不易出现震动,幼虫生长环境稳定。物料翻转区域受力沿犁铧分布均匀,无明显应力集中区。因此相同工作条件下受力相对铲形翻转器受力小,对电动推杆刚度要求小,对材料要求低,应力集中几率小,工作性能性能更优。
4 结论
通过对两种翻转器翻转物料过程的实验仿真,分析其翻转效果和应力情况,得出了可靠的分析结果。铲形翻转器在工作行进过程中不稳定,接触区域易产生应力集中现象且翻转效果不佳,对幼虫伤害严重。在满足饲料翻转效果和保护幼虫的前提下,犁型翻转器结构稳定性更好,且应力分布较均匀,承载能力更强,工作条件良好。本文对黑水虻养殖装置的研发提供了可靠的数值结果,为实现黑水虻生态无害化垃圾处理奠定了基础。

图10 铲型翻转器应力云图

图11 犁型翻转器应力云图
猜你喜欢
信阳农林学院学报(2021年1期)2021-04-01
作文新天地(初中版)(2019年6期)2019-08-15
北京航空航天大学学报(2017年6期)2017-11-23
广东第二课堂·小学(2017年1期)2017-02-20
广东第二课堂·小学(2017年1期)2017-02-20
农村农业农民·B版(2016年7期)2016-10-21
浙江大学学报(工学版)(2016年10期)2016-06-05
辽金历史与考古(2016年0期)2016-02-02
辽金历史与考古(2016年0期)2016-02-02
天然产物研究与开发(2014年8期)2014-04-27