差动再生制动转矩控制的电动汽车稳定性研究
2019-10-16 08:18郑利锋
中国工程机械学报 2019年5期
郑利锋,王 明
(1.常州机电职业技术学院 车辆工程学院,江苏 常州 213164;2.安徽理工大学 机械工程学院,安徽 淮南 232001)
电动汽车的驱动系统是电动机,具有转矩响应快、转矩准确检测、可在各轮上可单独拆卸等优点[1].基于这些优点,可以在EV上开发出更有效的防抱死制动系统(Antilock Brake System,ABS)和牵引控制系统(Traction Control System,TCS).
多年来,许多研究ABS和TCS的方法主要是通过控制滑移率来防止轮胎抱死和车辆打滑[2-5].最佳滑移率对保证轮胎能够产生足够高的制动力,阻止车辆的行驶是非常重要的[6].Cai等[7]设计了两个防滑控制器,一个基于规则的控制器和一个模糊逻辑控制器控制电动机转矩,在该研究中,可以通过计算车轮加速度与电动机转矩的比值估计滑移率.井后华等[8-9]提出了一种并联式混合制动滑移率控制方法,将再生制动控制转化为滑移率规划和控制两个问题,设计了滑膜控制器,并将其应用于四轮独立驱动电动汽车中.Hasegawa等[10]对带有两个车轮电动机的小型电动汽车的制动系统进行了检测,根据他们的研究,由于驱动轮胎(后胎)的空间限制,不能安装ABS的液压单元,ABS只在前轮胎上滑道上刹车时,驱动轮胎被锁死.为了提高小型电动汽车采用液压-机械混合制动系统的安全性,Ogino等[11]开发了一种小型电动汽车双轮电动机再生制动系统,ABS安装在前胎上,再生制动器安装在后胎上,研究表明,在光滑道路制动过程中,可以控制再生制动器,防止轮胎在制动过程中抱死.Peeie等[12]开发了再生制动定时控制,以提高小型电动汽车的安全性和稳定性,在关键工况(结冰路面和转弯)制动过程中,采用再生制动定时控制,可以防止轮胎锁紧,防止车辆打滑,提高车辆的转向性能.
本文提出了差动式再生制动力矩控制方法,以差动滑移率值为依据单独控制每个车轮的再生制动力矩,提高小型四轮驱动电动汽车的稳定性.为了检验该模型的有效性,将道路状况设置为左侧结冰路面,右侧干沥青路面.最后在Matlab/Simulink中开发了仿真模型,进行了仿真研究.
1 模型建立
1.1 车辆模型
本文采用的车辆模型为丰田COMS,型号为AK10E-PD.该汽车的驱动系统有两个后轮电动机.在数值分析中,在前轮上增加了两个车轮电动机,设计为带有4个内轮电动机的小型电动汽车,其规格参数如表1所示.
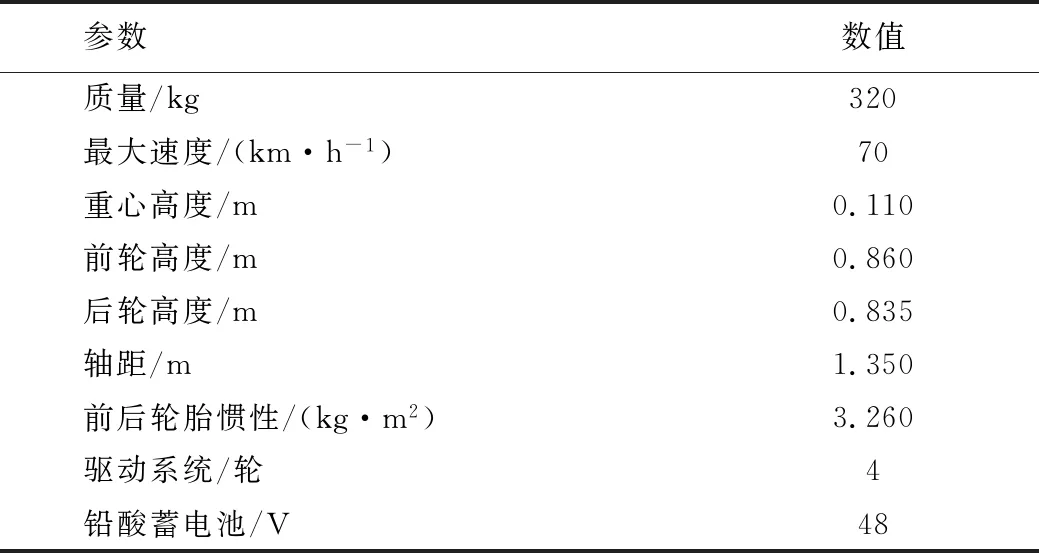
表1 车辆模型规格参数Tab.1 Specification parameters of vehicle model
1.2 动力学运动方程
小型电动汽车整车受力情况如图1所示.纵向和横向及横摆运动方程如下:
(3)
式中:vx,vy为车辆在横轴和纵轴上的速度;γ为转动速度;Xfl,Xfr,Xrl,Xrr分别为左前、右前、左后、右后轮对地面的摩擦力;Yfl,Yfr,Yrl,Yrr为左前、右前、左后、右后的侧偏力.
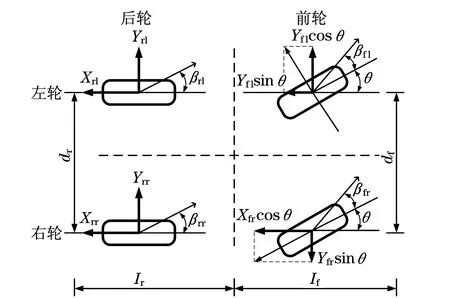
图1 整车受力图Fig.1 Force bearing of the whole vehicle
采用电刷轮胎模型对轮胎的摩擦力Xfl,Xfr,Xrl,Xrr和Yfl,Yfr,Yrl,Yrr侧偏力进行了数值模拟.该模型允许纵向和横向的弹性变形.制动过程中摩擦力和侧偏力的关系式如下:
式中,ξp,u,Ks和Kβ为中间变量,表达式如下:
(6)
式中:b,l分别为相互作用的轮胎表面的宽度和长度;Kx,Ky为轮胎在纵向和侧向上的刚度;βT轮胎的侧滑角.根据分析车辆模型,各参数取值如下:b=10 cm,l=15 cm,Kx=Ky=3.3×107N/m3.
1.3 最佳滑移率
本文提出的差动再生制动力矩控制方法,以滑移率与摩擦系数之间的关系为基础,制动过程中的滑移率方程如下:
(7)
式中:v为车辆速度;r为轮胎半径;ω为轮胎角速度.
干沥青、结冰路面滑移率与摩擦系数的关系如图2所示[14].当较大的驱动力矩突然下降到0时,将会出现打滑现象.该种情况下,制动力和侧向力将消失,滑移率将迅速增加到1.0,此时,车辆将变得不稳定并打滑.
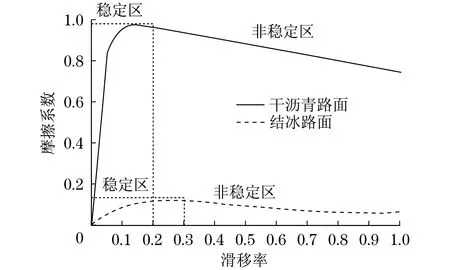
图2 不同路面滑移率与摩擦系数的关系Fig.2 Relationship between slip rate and friction coefficient of different pavement
从图2可以看出:干沥青路面滑移率的最佳取值为0.1~0.2,结冰路面滑移率的最佳取值为0.2~0.3,在此范围内,轮胎可以产生足够高的制动力,以阻止车辆或防止车辆打滑.
2 再生制动力矩
2.1 再生制动力矩控制
再生制动力和机械制动力百分比的理想制动力分布如图3所示.从实际制动曲线出发,利用摩擦系数最大值时产生的前制动力,可以测量后制动力的最大程度.前、后轮胎理想制动力方程如下:
(8)
式中:Fm为机械制动力;Fr为再生制动力;Fid为理想制动力.
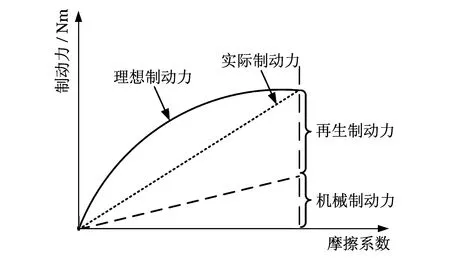
图3 理想制动力分布Fig.3 Ideal braking force distribution
为了改善小型电动汽车的制动性能,在结冰路面制动过程中,提出了再生制动力矩控制方案.在该模型中,基于轮胎的滑移率λ,再生制动力矩控制类似于ABS.从图1可以看出,如果λ大于0.3,则车轮电动机关闭,车辆处于中立状态.该种情况下,车轮电动机不会产生再生制动力矩,轮胎的制动力只是机械制动力.但是,当λ小于0.2时,车轮电动机启动并产生再生制动力矩,以恢复理想的制动力.
2.2 制动力矩控制方法

(9)
式中:I为轮胎惯性.前轮胎惯性矩为Ifr=Ifl=0.56kg·m2,后轮胎惯性矩为Irr=Irl=3.67 kg·m2.
在制动过程中,车轮电动机产生再生制动力矩,各轮胎的总制动力矩为机械制动力矩和再生制动力矩之和.各轮胎总制动力矩表达式如下:
(10)
式中:η为制动效率因子,其值为η=1.5.
如果λ不在最佳范围(0.2~0.3)内,ABS控制单元将开始工作,控制主液压缸内的制动压力.主液压缸的制动压力将直接指向前轮液压缸和后轮动力缸.从主缸到前轮缸没有时间延迟响应,ABS足以使前轮胎的滑移率和侧偏力最大化.然而,对后轮制动系统,由于机械制动系统的刚性,在ABS的运行过程中出现较大的时间延迟.为了补偿摩擦力的损失,车轮电动机将产生再生制动力矩.当λ值不在最佳范围内时,再生制动定时控制将运行.从ABS的运行和再生制动定时控制出发,既可以保持λ的最优值,又可以最大限度地提高制动力和侧偏力,从而保证车辆的稳定性.
3 结果与讨论
3.1 无电动机控制的再生制动效果
研究无电动机控制的再生制动的效果,右侧为干沥青道路,左侧为结冰道路.当差速再生制动力矩不作用于所有轮胎时,4个轮胎速度(vFL,vFR,vRL,vRR)和车辆速度(v)减速过程如图4所示.从图4中可以看出:右侧轮胎速度(vFR,vRR)与车辆速度v近似相等.然而,由于左侧轮胎(vFL,vRL)与路面之间的摩擦力较低,在2 s内,左侧轮胎速度vFL和vRL从13.3 m/s迅速下降到1.5 m/s.2 s后,左侧轮胎速度vFL,vRL和右侧轮胎速度vFR,vRR及车辆速度v基本相等.表明在低速条件下,电动机产生的再生制动力很小,不会影响轮胎的滑移.
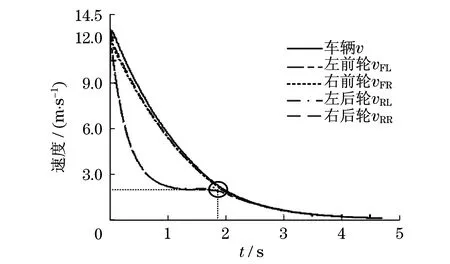
图4 无差动再生制动力矩控制的车辆和轮胎减速过程Fig.4 Deceleration process of vehicle and tire controlled by non-differential regenerative braking moment
无差动再生制动力矩控制的轮胎滑移率如图5所示,从轮胎滑移率可以测量车辆的打滑情况.从图5中可以看出:右侧轮胎的滑移率(λFR,λRR)非常小,最大值不超过0.1.在干沥青路面上制动时,由于轮胎与路面之间的高摩擦力,可以采用最佳制动力来阻止轮胎旋转.然而,在结冰路面条件下,左侧轮胎的滑移率(λFL,λRL)在1.0 s内从0迅速增加到0.7.从1.0 s开始到2.0 s,滑移率λFL和λRL迅速下降到0.1.电动机产生的再生制动力矩与轮胎的速度成正比.没有再生制动力矩控制,在高速情况下,轮胎将会打滑.在低速状态下,从2.0 s开始,滑移率非常小.
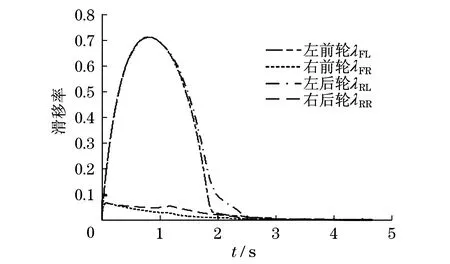
图5 无差动再生制动力矩控制的轮胎滑移率Fig.5 Tire slip rate controlled by non-differential regenerative braking moment
3.2 差动再生制动力矩控制效果
差动再生制动力矩控制下,车辆在干沥青和结冰路面上减速过程如图6所示.
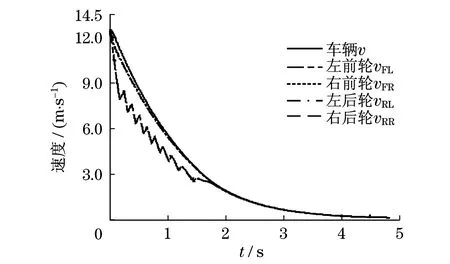
图6 差动再生制动力矩控制时车辆和轮胎的减速过程Fig.6 Deceleration process of vehicle and tire under differential regenerative braking torque control
由图6可以看出:减速过程中,右侧轮胎速度(vFR,vRR)与车辆速度基本相同.在干沥青路面条件下,轮胎与路面接触面之间的摩擦较高,电动机产生的再生制动力使轮胎不产生任何滑移.然而,对于左侧轮胎,轮胎速度(vFL,vRL)从0~1.5 s呈现波动式递减.这是因为在高速情况下,车辆在差动再生制动力矩控制下,在结冰路面上制动时,电动机制动将根据轮胎的滑移率而关闭和开启.1.5 s后,左侧轮胎速度vFL,vRL和右侧轮胎速度vFR,vRR及车辆速度v基本相等.这是因为在低速情况下,再生制动力被最小化,轮胎没有发生滑移.
差动再生制动力矩控制下轮胎滑移率如图7所示.
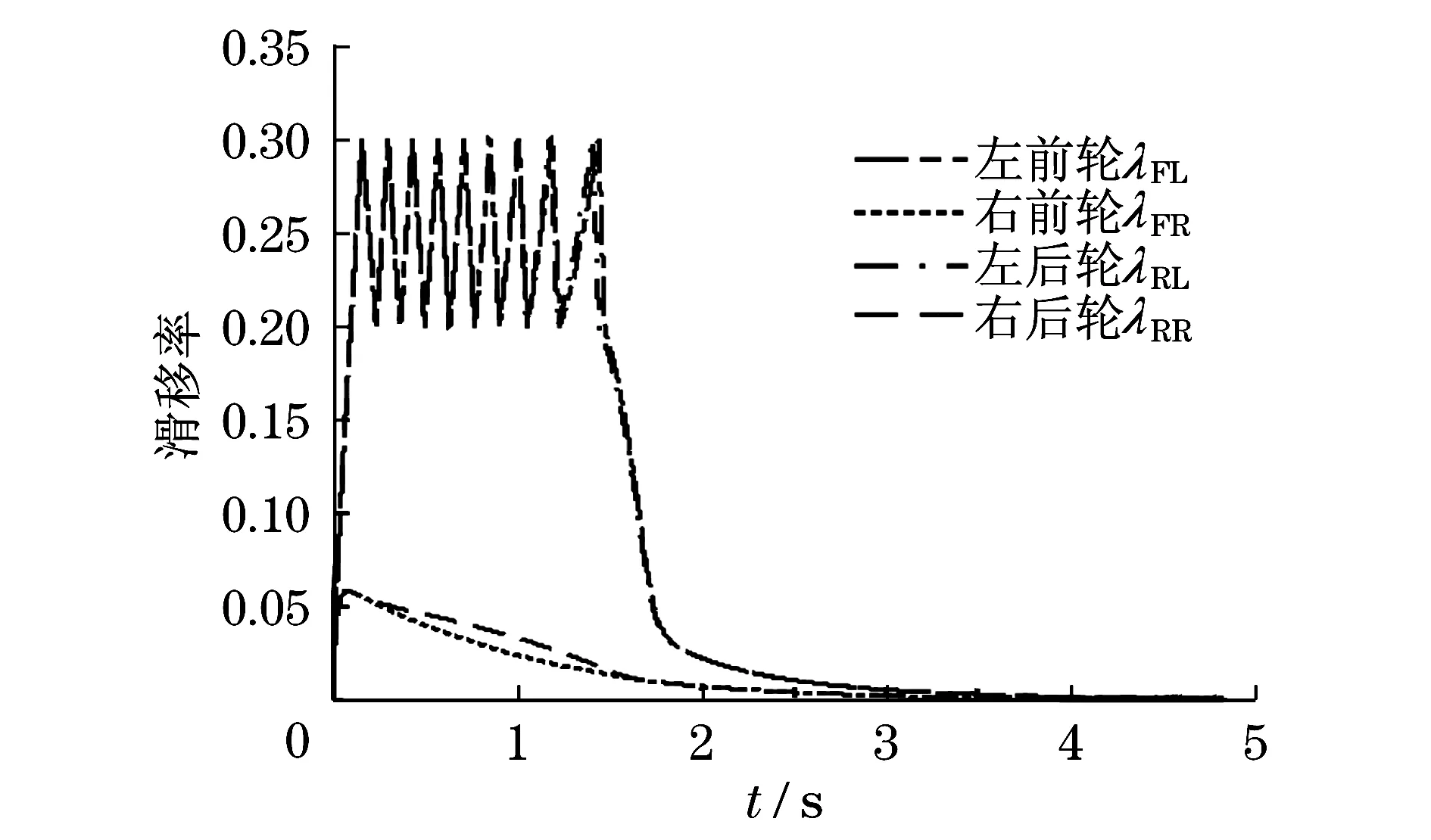
图7 差动再生制动力矩控制的轮胎滑移率Fig.7 Tire slip rate controlled by differential regenerative braking torque
从图7中可以看出:右侧轮胎的滑移率(λFR,λRR)非常小,最大值不超过0.06.在干沥青上制动时,轮胎没有发生滑移.然而,在结冰的道路上,左侧轮胎的滑移率(λFL,λRL)在1.6 s内波动.在这种情况下,控制器将信号发送给电动机,以控制每个车轮上的再生制动力矩,以防止轮胎抱死.1.6 s后,由于轮胎的转速很小,控制器不再发送信号控制再生制动力矩.
对比分析图5和图7可知:在不采用再生制动力矩控制时,整个减速过程中,轮胎滑移率高达0.7,出现严重的打滑;采用差动式再生制动力矩控制下,4个轮胎的滑移率始终不超过0.3,控制在最佳滑移率范围内,提高了电动汽车的稳定性,证明了本文提出的控制策略的有效性.
4 结语
本文设计了差动再生制动力矩控制器,以提高采用4轮电动机制动的小型电动汽车稳定性.为了研究差动再生制动力矩控制的有效性,在基于Matlab/SimulinK软件开发了仿真模型,设置右侧道路为干沥青路面,左侧道路为结冰路面.仿真结果表明:在不同的道路工况下,采用差动再生制动力矩控制可以避免轮胎的抱死,此外,还可以防止车辆打滑,提高车辆的稳定性.
猜你喜欢
作文周刊·小学一年级版(2022年24期)2022-06-18
防爆电机(2021年6期)2022-01-17
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
石油化工建设(2020年1期)2020-08-24
电子制作(2019年10期)2019-06-17
小天使·一年级语数英综合(2019年2期)2019-01-10
电子制作(2018年14期)2018-08-21
小学生导刊(低年级)(2017年1期)2017-06-12
电子制作(2017年10期)2017-04-18