空间充气展开绳网系统捕获目标自抗扰控制研究
2019-10-14 06:45刘昊魏承谭春林刘永健
自动化学报 2019年9期
刘昊 魏承 谭春林 刘永健 赵 阳
随着太空垃圾日益增多,对人类的航天活动造成极大隐患.由于太空垃圾多为非合作目标,刚性捕获系统[1]已经难以胜任,因此空间飞网柔性捕获系统获得了极大发展,如空间绳系飞网[2],空间机动飞网[3]等.空间绳系飞网通过抛射牵引质量块带动飞网展开,并由系绳拖拽被捕获目标离轨,增大了捕获面积,降低了对捕获精度的要求,但是空间绳网无法长久维持构型.空间机动飞网由绳网末端机动卫星维持绳网构型以提高捕获成功率,但是末端机动成本过高,且控制复杂.因此空间充气展开绳网系统(Space inflatable net capture system,SINCS)被提出,其由充气梁和绳网组成,如图1 所示,通过充气梁将绳网整体展开,支撑起一个具有一定容积的伞状结构,将捕获目标包裹进内部后,利用安装在充气梁顶端微型收口装置收紧网口系绳实现收口,从而完成捕获.该方案结构稳固,控制简单可靠,具有更好的应用潜力.
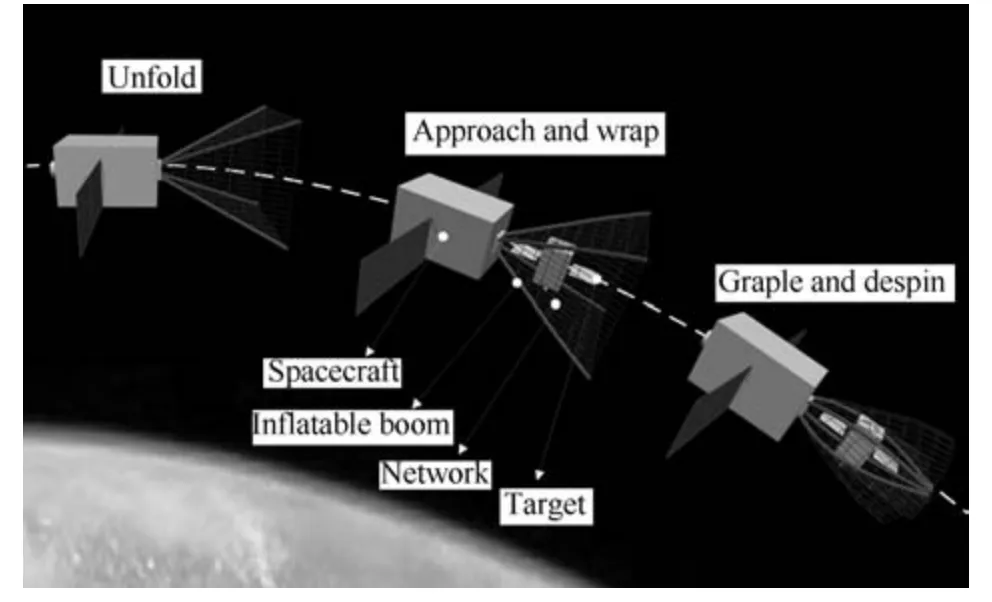
图1 空间充气展开绳网系统任务流程Fig.1 The workflow of SINCS
国内外研究人员经过多年的研究,对飞网的研究从其绳网动力学建模与仿真到实验[4−6],已经取得了较为完善的成果,英国萨里大学萨里航天中心RemoveDebris[7]则是飞网捕获系统的典型代表.充气展开绳网系统涉及充气展开梁,其是一种薄膜充气结构,因轻质,压缩比高,充气展开后具有承载性能,在空间展开领域得到重视,如EchoBalloons 充气卫星,IAE 充气天线[8].薄膜充气结构的承弯分析是研究的热点,主要分为基于理想薄膜充压,基于壳体充压和兼顾两方面影响折中的分析方法[9].但是充气捕获机构捕获过程中受到绳网拉扯以及与目标发生碰撞,受力复杂,单纯的理论研究已经不能完全适用.目前,对空间充气展开绳网系统的研究尚处于概念和机构设计阶段,如RETICULAR[10]被设计用于捕获陨石,REDCROC[11]设计捕获空间碎片.国内外还未有对空间充气展开绳网系统动力学方面的研究.
空间充气展开绳网系统工作流程包括充气展开,接近包裹以及捕获消旋三个阶段.其中捕获消旋是决定任务成败的关键.捕获后的充气绳网系统变成一个由柔性捕获机构和含碰撞的未知惯量目标组成的大柔性,多干扰,强耦合的非线性系统,给航天器姿态稳定控制带来了很大的困难.传统的PID 方法并不能很好地解决这类问题.滑模变结构控制虽然对模型不确定性与干扰具有一定的鲁棒性,但是受其不确定上界所限制难以工程化.自抗扰控制[12]将系统所有不确定因素作为未知扰动进行估计并补偿,能够极大地提升控制系统的性能,并已经成功应用于工业领域[13−16].因此,自抗扰控制十分适合无法精确建模且含有大扰动的空间充气展开绳网系统姿态控制.
本文基于绝对节点坐标方法(Absolute nodal coordinate formulation,ANCF)[17]和理想薄膜充压失效方法建立绳网和充气梁的动力学模型,应用赫兹理论建立柔性体碰撞模型,从而建立空间充气展开绳网系统捕获动力学模型.首先,对收口捕获过程进行仿真分析,以验证捕获方案和动力学模型的准确性.其次,针对未知惯量目标与捕获机构碰撞对系统的不确定干扰,设计了航天器姿态稳定自抗扰控制器.控制器能够实时估计和补偿干扰,满足捕获后航天器姿态稳定控制需求.最后,仿真验证了自旋目标能够在与充气梁和绳网的相互作用下实现有限时间内的消旋.研究结果对新型空间充气展开绳网系统设计具有指导意义和参考价值.
1 动力学建模与分析
空间充气展开绳网系统包括服务航天器和充气捕获机构.充气捕获机构由四根充气梁支撑绳网组成捕获网袋,绳网按照18×10 横纵排列编织.为了简化分析,作如下假设.
假设1.不考虑轨道和空间干扰力矩的影响.
假设2.不考虑充气捕获机构之外的其他柔性部件,服务航天器简化成单刚体长方体.
假设3.捕获目标简化为单刚体长方体.
参考坐标系如图2 所示,Σo为惯性系,Σb为服务航天器基体坐标系,位于航天器中心.Σc为捕获机构坐标系,Σt为目标坐标系.Rct为目标坐标矢量,Rb为服务航天器坐标矢量.下面对空间充气展开绳网系统进行动力学建模与分析.
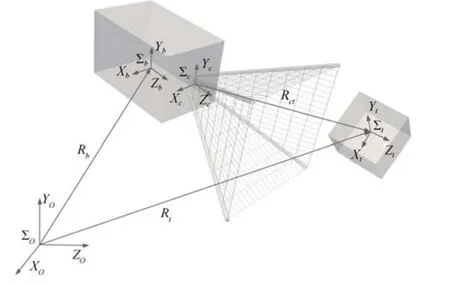
图2 参考坐标系Fig.2 Reference frames
1.1 基于ANCF 的绳索动力学
为了提高计算效率,在Euler-Bernoulli 梁理论假设的基础上,忽略扭转变形,仅考虑轴向变形和弯曲变形,从而得到更为简单的ANCF 柔索单元.
设单元的长度为L,柔索单元中轴线上一点的位置矢量用广义坐标可表示为:

式中,S(x)为三维ANCF 柔索单元的形函数,q(t)为第j个柔索单元的广义坐标.
由于柔索单元的形函数为常数,柔索上任意一点的速度矢量可写为:

柔索单元的动能可写为:

式中,ρ和A分别为柔索单元的密度和横截面积,为柔索单元的常值质量矩阵.
柔索单元的弹性能为:

式中,E为弹性模量,Jκ为柔索截面的惯性矩,jε0为轴向应变,jκ为曲率.
系统总的动能和应变能可写为:

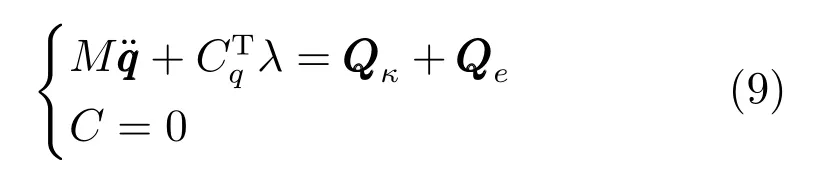
考虑用受约束离散多体系统的微分代数方程描述动力学方程:
式中,C为约束方程,λ为约束方程对应的拉氏乘子,Qe为广义力矢量.
由式(6)可得:

因此柔索系统的动力学方程写为:
1.2 充气梁弯曲等效分析
根据理想薄膜充压的失效理论[18],充气梁在弯曲载荷作用下,弯曲失效过程分为两部分:线性承载阶段和屈曲失效阶段.
线性承载阶段充气梁变形较小,充气梁的抗弯刚度在允许气压下始终保持恒定.此时充气梁可以简化为梁单元进行数值计算.考虑充气梁和等效梁的弯曲刚度相等E1I1=E0I0,等效梁的弹性模量E1

式中,D和d分别表示充气梁的外径和内径,E0为充气梁材料弹性模量.
屈曲失效阶段充气梁发生大挠度的变形,充气梁在外载荷的作用下产生局部屈曲的弯矩称为临界弯矩M1,当达到其极限弯矩M2后,充气梁不可承受载荷.

式中,p是充气梁内压,r是充气梁截面半径.
系统捕获阶段,充气梁在收口绳索的牵引下发生大挠度变形,将经历弯曲失效过程.然而由于捕获是充气梁、绳网和目标共同作用的复杂过程,而且面对不同的目标,捕获碰撞是不可预测的,碰撞处可能会发生新的屈曲,因此屈曲刚度计算和屈曲点预测理论已经不适用.本文做如下简化,将充气梁均分为多段梁单元,通过每段梁单元的等效弯曲刚度变化模拟充气梁的屈曲失效过程(如图3 所示).屈曲失效等效的方法如下:判断每段梁单元的弯矩,当弯矩小于临界弯矩M1时,梁单元的弯曲刚度为线性承载阶段的等效刚度.当弯矩大于临界弯矩M1时,等效刚度降低,直至弯矩大于极限弯矩M2时,梁单元失效.
考虑充气梁的结构尺寸已经确定,定义梁单元的弹性模量为其等效弯曲刚度.规划充气梁捕获过程等效刚度与弯矩曲线如图4 所示.

图3 简化充气梁Fig.3 Equivalent inflatable boom
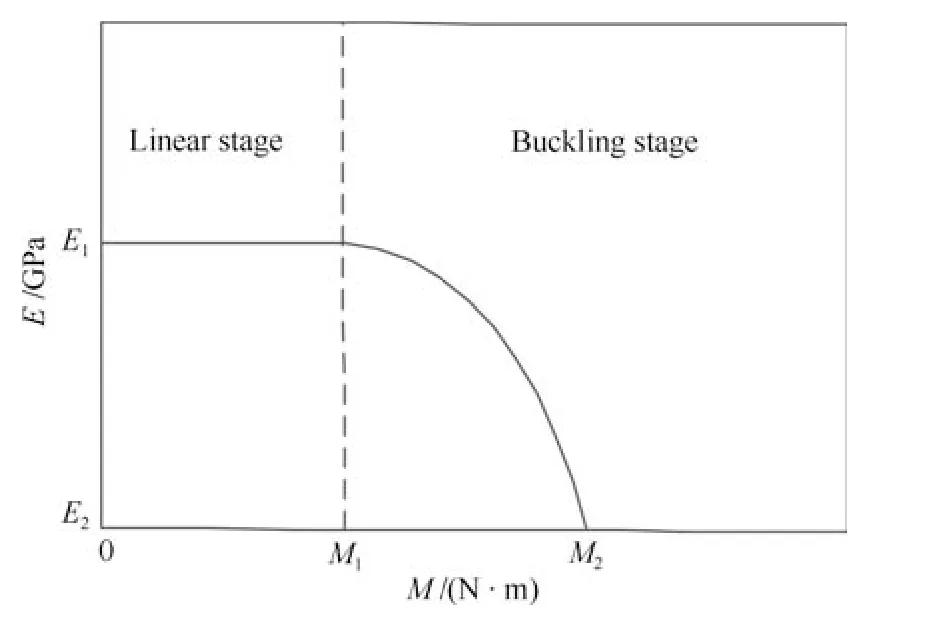
图4 等效刚度-弯矩Fig.4 Equivalent stiffness-moment
其中,文献[19]通过实验证明局部屈曲至失效段的变化是非线性的,采用三次样条曲线拟合规划该非线性段,其公式如下:

1.3 碰撞动力学
捕获碰撞过程中利用虚功原理,将作用在单元面上的碰撞摩擦力转化为单元广义节点力:

式中,p是单元碰撞点对应的单元坐标参数,由碰撞点位置决定.F为作用在碰撞点上的碰撞摩擦力,由赫兹接触模型计算得到:

式中,n为碰撞法向单位矢量,t是切向单位向量.
法向碰撞力Fn为:

式中,K为碰撞接触刚度系数,C为接触阻尼系数,δ为法向穿透深度,˙δ为穿透速度,n为非线性接触力指数,B(δ)为判定是否接触的逻辑函数.

式中,R为绳单元的廓面在碰撞点处点曲率半径,v1、v2为柔性绳和捕获目标的泊松比,E01,E02为柔性绳和捕获目标的弹性模量.

式中,e为恢复系数,v为初始碰撞速度.
切向摩擦力Ft定义为库仑摩擦模型:

式中,µ为摩擦系数,其由切向相对速度vt决定.
2 捕获仿真与分析
2.1 捕获目标包络分析
考虑捕获过程中往往不能完全确定捕获机构与目标的相对姿态,所以假设目标具有任意相对姿态,即其可能位姿空间的包络体为球形体,分析充气展开绳网系统能够捕获目标的最大包络参数.捕获机构参数可以由下边长ld,上边长lu,深度h描述,其尺寸和包络图如图5 所示.
收口时通过安装在充气梁顶端的收口装置收紧网口系绳从而实现网袋的锁紧,即应该向中心弯曲并相交于一点.假设被捕获目标与捕获机构无相对运动,当大于弧长时,可以保证将目标完全包裹捕获在内,从而完成收口捕获.定义rc为包络球的最大半径,用于衡量捕获机构最大捕获能力.然而考虑观测误差,碰撞等因素,实际中被捕获目标的包络应该小于该尺寸,以防止目标发生逃逸.由几何关系,得:
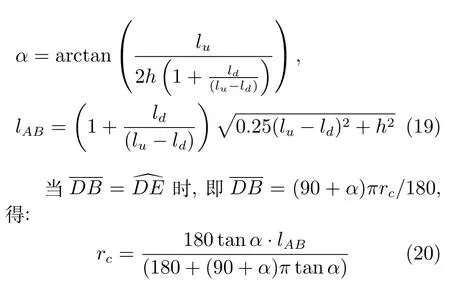
因而可以得出目标的最适包裹深度hc为:

rc和hc可以作为捕获传感器判断是否进行下一步的收口操作的依据.
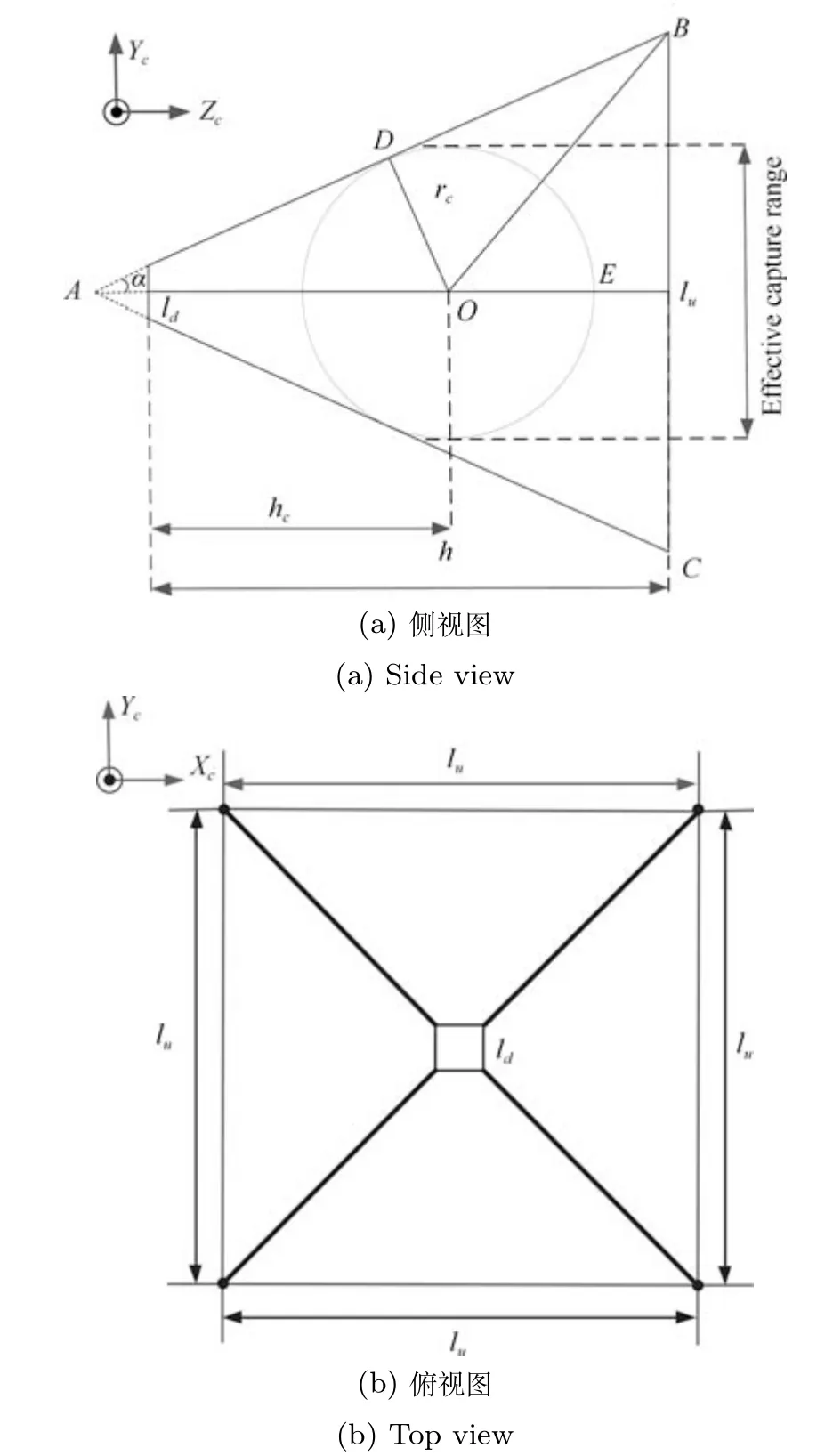
图5 尺寸与包络Fig.5 Size and envelope
2.2 动力学仿真
利用实验室自主开发的多体动力系统仿真平台MBDyn[20]进行捕获仿真.假设充气梁已经全部充气展开,充气展开梁与绳网施加柔性体约束,绳网和绳网之间施加柔性体约束,充气展开梁根部与服务航天器施加固定端约束.设置服务航天器和捕获目标的参数如表1 所示,其中捕获机构的惯量是未知的.
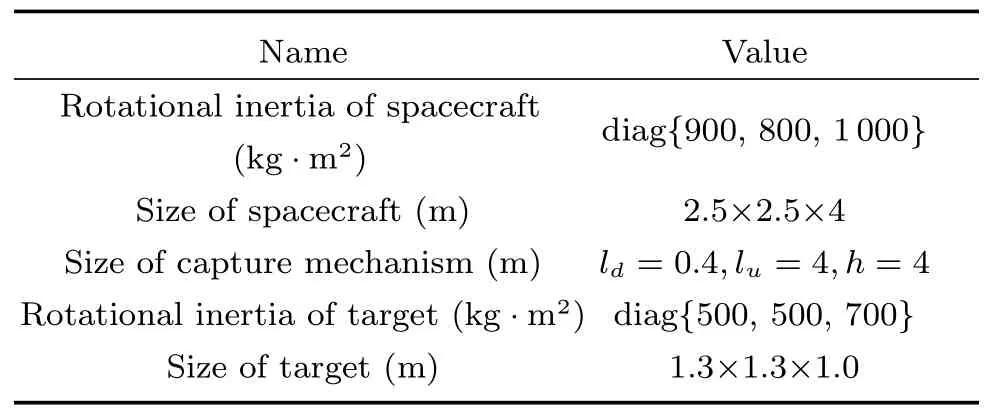
表1 服务航天器和捕获目标参数Table 1 Parameters of spacecraft and target
由于任务需求的复杂性和太空环境的恶劣性,要求捕获机构材料具有质量轻,高模量和高强度的特性,因此采用芳纶纤维编织绳网,采用聚酰亚胺纤维作为充气薄膜材料.考虑充气薄膜管的材料弹性模量2 GPa,厚度1 mm,充气内压25 kPa,由式(10)∼(12)可计算充气梁等效参数.仿真所需绳网和等效充气梁的力学参数如表2 所示.
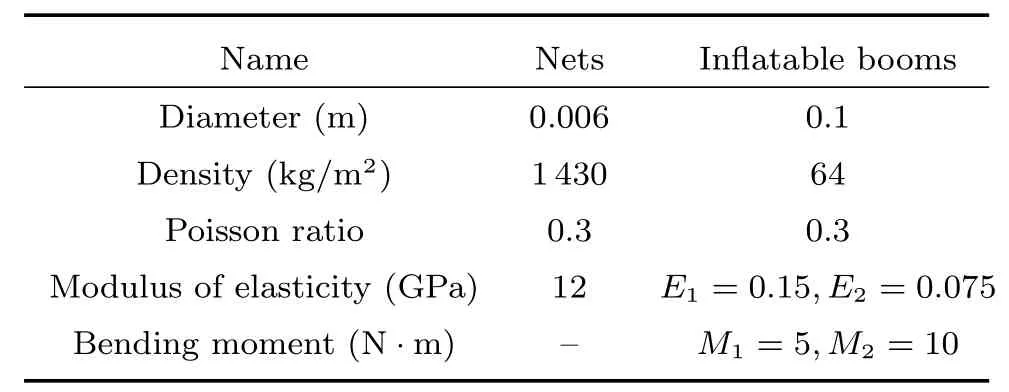
表2 绳网和充气梁参数Table 2 Parameters of net and inflatable boom
由式(20)和(21)得目标最大包络半径rc=1.15 m,最适包裹深度hc=2.38 m.碰撞的接触刚度系数和接触阻尼系数可由式(16)和(17)计算得到,恢复系数取0.5.收口操作由充气梁末端收口系绳的驱动下完成,设置收口系绳的拉力为30 N.服务航天器初始坐标Rb(0,0,0)m,初始姿态角θb(0,0,0)◦,目标初始坐标矢量Rct(0,0,2.3)m,初始姿态角θct(0,0,45)◦,仿真步长0.001 s,机构于2.3 s 完成收口,动力学过程如图6 所示.

图6 捕获过程Fig.6 Capture process
根据第1.2 节的分析,本文将每根充气梁简化为9 段,由充气梁端头到其根部编号依次为1∼9,等效刚度变化如图7 所示.等效梁从端部向根部依次产生屈曲,这是因为有轴向分力导致的.1.7 s 由于碰撞的发生,导致充气梁等效刚度发生振荡.
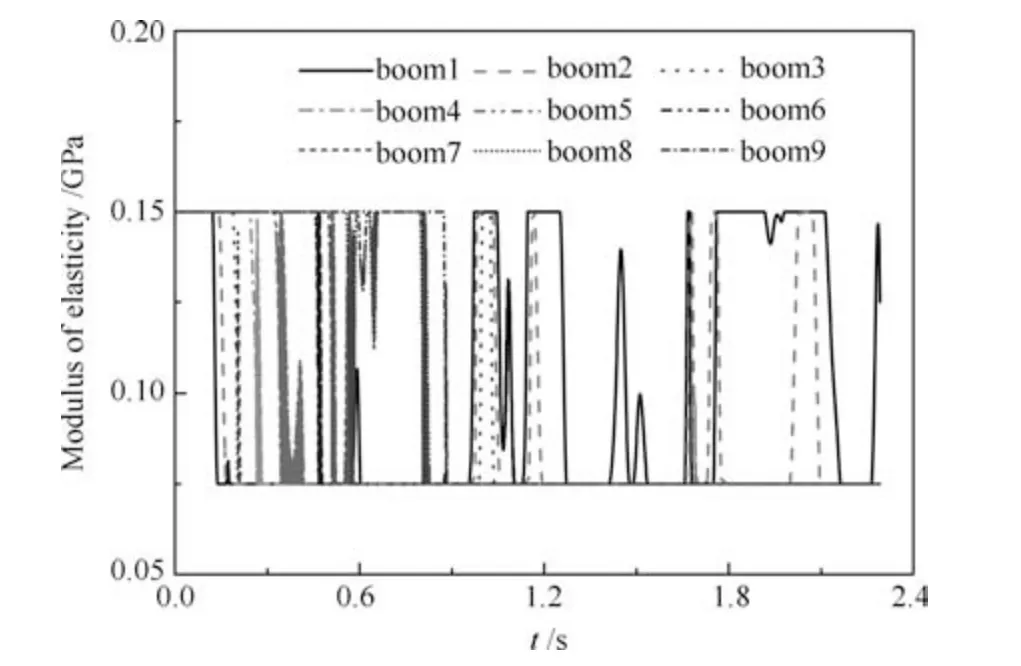
图7 等效刚度变化Fig.7 Change of equivalent stiffness
图8 为目标与捕获机构的碰撞力曲线,0.6 s 首先发生网袋与目标的碰撞,碰撞力较小.随着包裹的加深,1.7 s 充气梁与目标发生碰撞,碰撞力增大,且由于充气梁向内收口,因此Z方向的碰撞力要大于X和Y方向.

图8 目标碰撞力Fig.8 Collision of target
捕获过程中服务航天器的位移曲线如图9 所示.可知航天器X和Y方向基本没有偏移,Z方向由于捕获碰撞的影响先增大后减小,产生0.03 m 的偏移,捕获过程对服务航天器影响很小.因此充气展开绳网系统成功实现对未知目标的捕获.
2.3 姿态稳定自抗扰控制
由第2.2 节可知,当目标与服务航天器无相对运动时,捕获过程对服务航天器几乎没有影响.但是对于自旋的目标,捕获目标的惯量以及捕获后目标与捕获机构的碰撞都是未知的,会对服务航天器姿态稳定造成影响,为了维持捕获后服务航天器姿态稳定和使目标快速消旋,设计卫星姿态稳定自抗扰控制器.
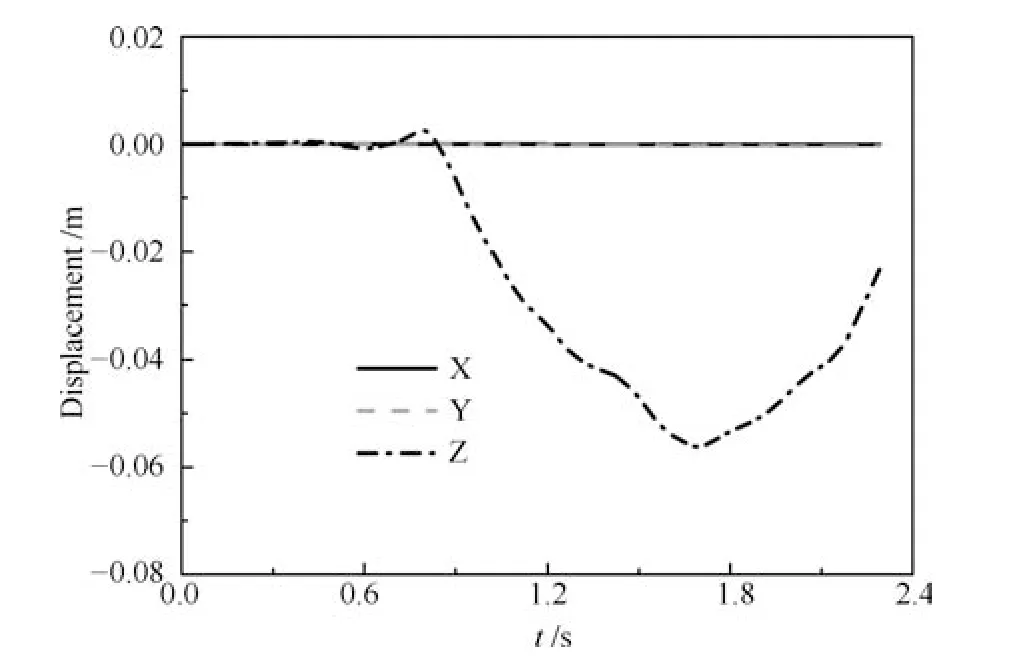
图9 服务航天器位移Fig.9 Displacement of spacecraft
2.4 航天器姿态动力学
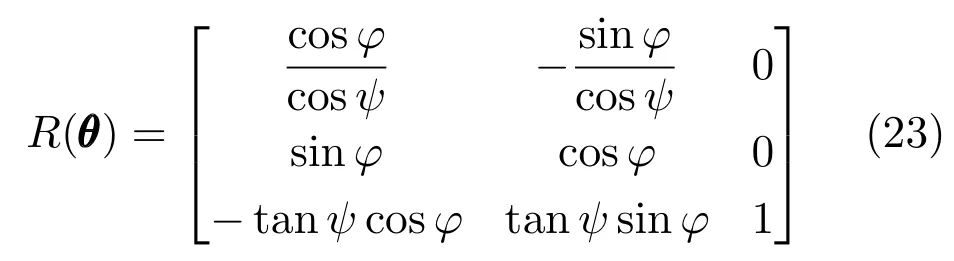
服务航天器姿态动力学模型可以表示为:
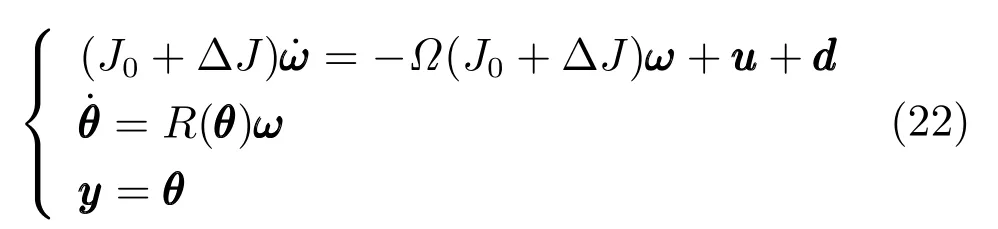
式中,J0∈R3×3为服务航天器转动惯量,∆J ∈R3×3为由于燃料消耗和柔性捕获机构引起的不确定项,ω=[ωx ωy ωz]T为服务航天器角速度矢量,d=[dx dy dz]T为外部干扰力矩,u=[ux uy uz]T为服务航天器控制力矩,考虑捕获目标惯量较大,控制力矩由力矩陀螺执行机构提供,Ω为斜称矩阵,θ=[γ ψ φ]T为服务航天器姿态欧拉角,R表达式如下
2.5 ADRC 控制律设计
由式(22)可得:
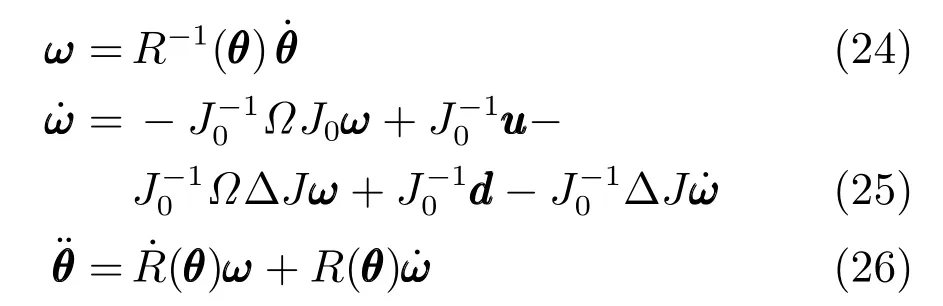
因此

这是一个二阶系统,考虑服务航天器姿态角度和角速度可测,设计自抗扰控制器,如图10 所示.利用线性扩张观测器估计扰动,通过PD 角度反馈跟踪期望欧拉角并对力矩进行实时补偿,使得系统对惯量不确定和干扰具有抑制的能力.
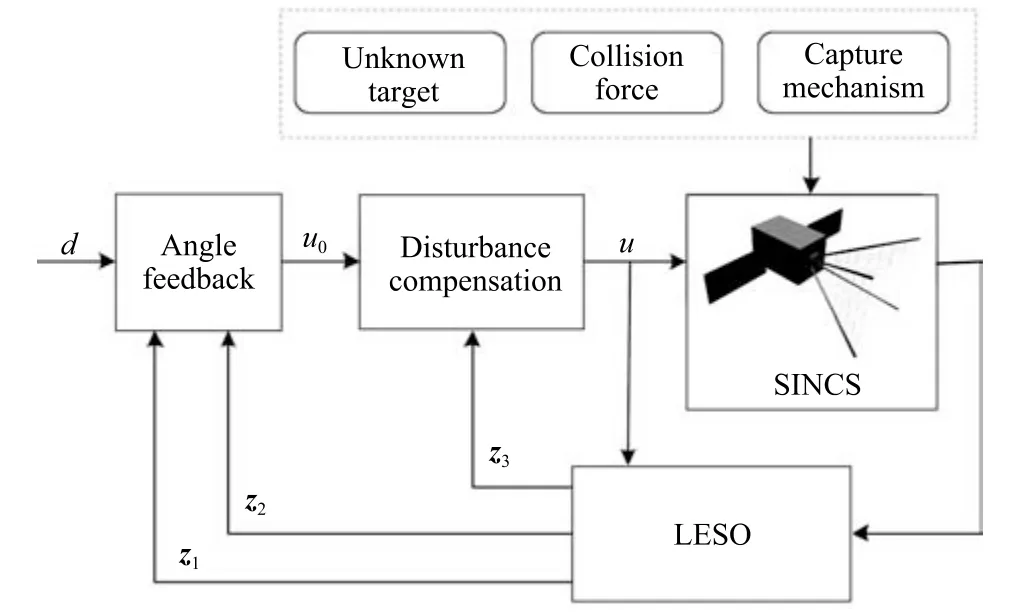
图10 控制器框图Fig.10 Controller structure
2.5.1 扩张观测器设计
设计线性离散三阶扩张观测器如下:
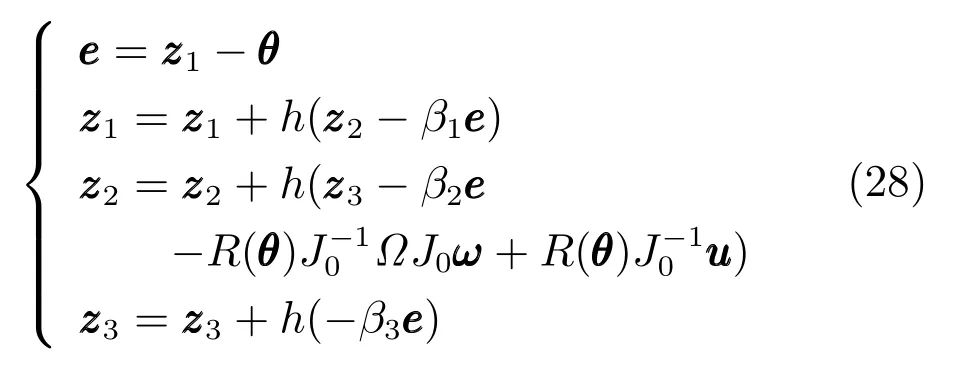
注1.线性扩张观测器参数整定方便,且扰动跟踪性能几乎不随扰动幅度发生变化,非常适合对未知惯量目标,未知碰撞的干扰估计
注2.z1、z2、z3分别为对和扰动的估计值.h为采样步长,β1、β2、β3为决定观测器性能的参数.为模型已知部分,能够减小观测器的负担,提高估计能力.
注3.根据文献[21],按3ω法选取参数时,系统稳态时有参数选取如下:

2.5.2 反馈律及力矩补偿
控制反馈采用PD 角度线性误差反馈律,设计如下:

对干扰和耦合项的补偿设计如下:

角度线性误差反馈律参数选取如下:

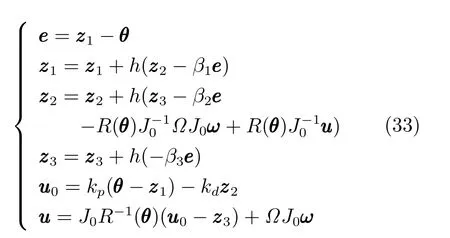
根据式(28)、(30)和(31),得到ADRC 控制律为:
2.6 动力学仿真
取第2.2 节充气展开绳网系统捕获目标成功后的状态构型,即收口系绳完全收紧,充气梁末端互相约束.设置服务航天器初始姿态为(0,0,0)(◦),目标自旋角速度为(1,−1,30)(◦/s).期望服务航天器姿态角(0,0,0)(◦),期望目标角速度小于0.5(◦/s).
自抗扰控制器参数:kp=2.56,kd=3.2,仿真步长h=0.001 s,观测器系数可由式(29)计算得到.设置对比PD 控制器,取其控制率参数:KP=diag{1 152,1 024,1 260},KD=diag{1 440,1 280,1 600}.仿真时间100 s,动力学过程如图11 所示.
对比两种控制方案,仿真结果如图12 所示.可以看到自抗扰控制姿态角稳定误差均在±10−4rad的范围内,比PD 控制提高两个数量级以上,能够满足航天器的稳定控制需求.
扩张观测器对干扰估计如图13 所示,扰动z33明显大于z31和z32.对于PD 控制器,其φ的跟踪精度相比γ和ψ的跟踪精度减少了一个数量级,而对于自抗扰控制器,其较好地估计了干扰并在控制力矩上进行实时补偿(图14),因此获得远高于PD的控制精度.自抗扰控制器相比于PD 控制器,干扰越大,其控制效果越明显.同时,虽然目标绕X和Y轴自转角速度很小,但是对航天器造成较大的干扰,因为其通过充气梁对航天器的作用力臂较大导致的.
分析目标的碰撞力和状态如图15 和16 所示.由于目标受到捕获机构包裹,不断与充气梁和绳网发生碰撞,其动能与捕获机构的弹性势能互相转换,并逐渐耗散,最终实现消旋.图16 可以看出目标的自旋角速度不断减小,并于80 s 左右达到期望消旋结果.

图11 姿态稳定和消旋过程Fig.11 Attitude stabilization and despinning

图12 服务航天器姿态对比曲线Fig.12 Attitude curve of spacecraft
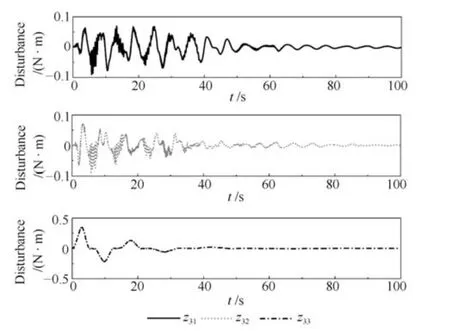
图13 干扰估计Fig.13 Estimation of disturbance
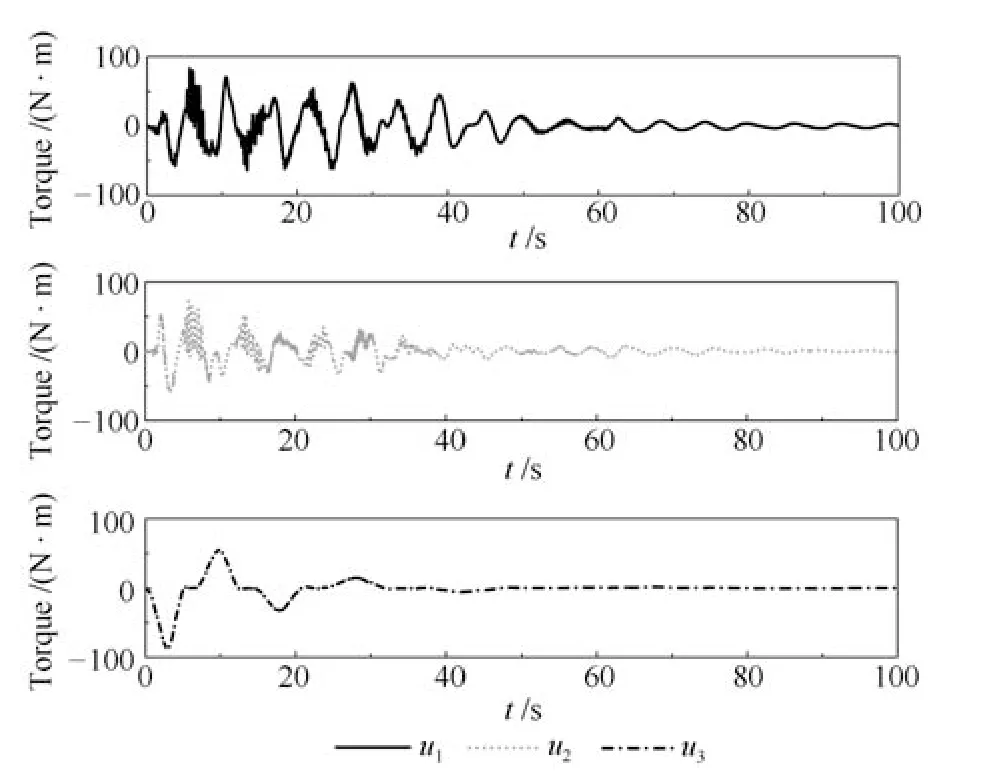
图14 控制力矩Fig.14 Torque of controller
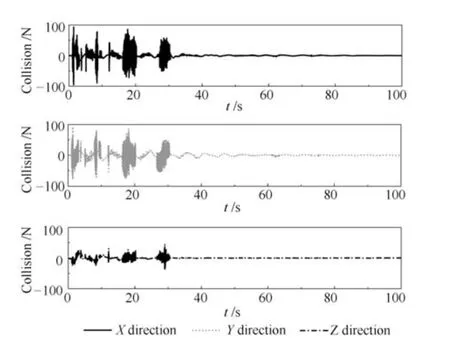
图15 目标碰撞力Fig.15 Collision of target
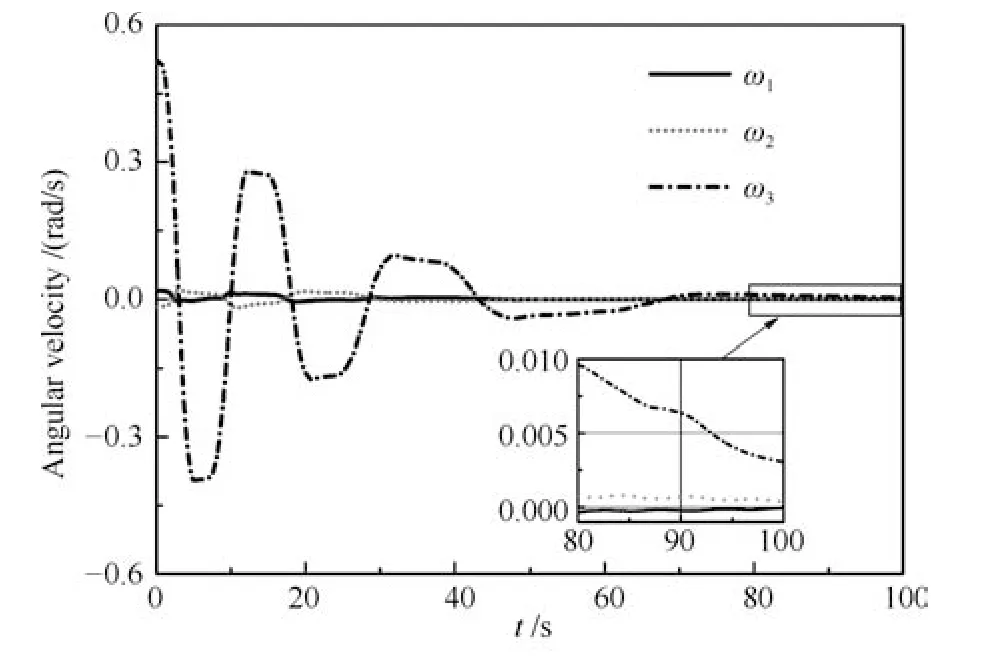
图16 目标角速度Fig.16 Angular velocity of target
综上所述,卫星姿态稳定自抗扰控制器能够满足对惯量未知的失稳自旋目标捕获后的系统姿态稳定控制需求,同时通过充气梁和绳网对目标的柔性缠绕,能够在有限时间内实现自旋目标的消旋.
3 结论
1)建立了充气展开绳网系统动力学模型,能够较好地描述系统绳网大变形,充气梁屈曲失效和碰撞的特性,模拟了系统捕获收口过程,实现对非合作目标的捕获.
2)设计了充气展开绳网系统姿态稳定自抗扰控制器,适用于捕获失稳自旋目标后的系统姿态稳定控制,能够很好地估计和补偿未知惯量目标与捕获机构相互碰撞对系统的干扰,满足捕获后服务航天器姿态稳定控制需求,性能指标明显优于PD 控制,且容易工程实现.
3)通过仿真验证了在柔性充气梁和绳网与目标的相互作用下,充气展开绳网系统能够在有限时间内对失稳自旋目标实现消旋.
猜你喜欢
国际太空(2022年7期)2022-08-16
环球时报(2022-04-28)2022-04-28
小学生学习指导(中年级)(2021年12期)2021-12-30
军事文摘·科学少年(2021年6期)2021-06-24
工业设计(2020年3期)2020-05-14
国际太空(2019年9期)2019-10-23
国际太空(2018年12期)2019-01-28
国际太空(2018年9期)2018-10-18
建筑科技与经济(2016年4期)2016-08-16
汽车零部件(2015年5期)2015-01-03