胰十二指肠前动脉弓的解剖及其在微创保留十二指肠胰头切除术中的作用
2019-10-12 09:02:22尚佩强
腹腔镜外科杂志 2019年9期
韩 亮,武 帅,尚佩强,王 铮,仵 正
(西安交通大学第一附属医院,陕西 西安,710061)
保留十二指肠的胰头切除术(duodenum preserving pancreatic head resection,DPPHR)于1972年由Beger首次完成并报道,用于治疗胰头肿块型慢性胰腺炎[1]。达到了切除病灶、保留十二指肠完整性的双重目的[2],利于提高患者的生活质量。随着微创外科的发展,腹腔镜与达芬奇机器人辅助的胰腺外科手术也已常规开展[3]。微创手术的优点之一是将手术视野放大,传统腹腔镜为3~5倍,而机器人手术可放大10~15倍,因此可较清晰地暴露术野及相关解剖结构;也使得在传统开腹手术中不易显露的血管在腔镜视野下利于暴露,从而保障了术中操作的安全性[4]。DPPHR的关键操作步骤之一就是避免术中、术后胆道与十二指肠缺血及因血管弓损伤出现的术后出血。为探索更安全、更利于保护血管弓,本胰腺外科中心与医学部解剖教研室针对62例尸体标本的胰头区动脉血管弓进行解剖,明确其起止、走行、毗邻位置及侧支吻合情况。并提出本中心的认识与见解,以期加深对胰十二指肠动脉弓的了解,从而利于DPPHR操作中对胰十二指肠动脉弓的保护。
1 资料与方法
1.1 临床资料 回顾分析2015年1月至2019年6月在西安交通大学第一附属医院肝胆外科胰腺中心行腹腔镜或达芬奇机器人辅助的9例DPPHR,纳入患者均为胰头区域肿块型慢性胰腺炎。均未发生术中血管弓损伤或术后出血,无中转开腹病例及围手术期死亡病例。术中均解剖胰十二指肠前动脉弓的构成血管胰十二指肠上前动脉及胰十二指肠下前动脉。
1.2 手术方法 患者取头高脚低15~20度“大”字位,5孔法施术。打开胃结肠韧带,进入小网膜囊,向右游离结肠肝区,探查显露十二指肠及胰头表面,解剖Henle干。解剖胰颈下缘,显露肠系膜上静脉,建立胰后隧道,于十二指肠水平部上方与肠系膜上静脉右侧区域寻找胰十二指肠下前动脉血管,予以保护,悬吊肠系膜上静脉,分离显露部分钩突。解剖胰腺上缘,显露肝动脉及胃十二指肠动脉,向下寻找胰十二指肠上前动脉,予以悬吊保护。术中超声探查病变范围,门静脉上方切断胰颈,胰头向右侧翻起,小心保护胰后筋膜,以胰十二指肠下前血管为标志由胰腺钩突部向胆管方向分离胰腺,注意观察十二指肠走行,发现主胰管后结扎切断,继续分离显露胰腺段胆管,注意保留胆管右后背侧的胰腺组织,同时避免能量设备损伤胆管表面的血管网。如果能辨认副胰管,则予以结扎。于胰腺前面沿胰十二指肠上前动脉左侧分离,移除标本,送术中冰冻病理。缝合处理十二指肠侧胰腺断面的出血点。胰肠吻合采取结肠后,应用改良的Blumgart胰腺导管-黏膜吻合术。冲洗,放置引流。
1.3 解剖标本资料 由西安交通大学医学部解剖教研室提供的成人尸体标本62具,其中男性32具,女性30具,均经福尔马林固定处理。分别观察并测量胰十二指肠前动脉弓及后动脉弓的构成血管,胰腺上缘游离腹腔干及肝总动脉各支,游离出胰十二指肠上前动脉,胃网膜右动脉及其分支;在肠系膜上动脉起始部游离出胰十二指肠下前动脉,向胰腺钩突部进行游离。从而完整地暴露胰十二指肠前动脉弓的走行位置及吻合情况。
2 结 果
2.1 微创DPPHR胰十二指肠前动脉弓的术中标记 本中心开展9例腹腔镜或达芬奇机器人DPPHR,解剖胰腺上缘,显露肝动脉及胃十二指肠动脉,向下寻找胰十二指肠上前动脉,予以悬吊保护(图1a)。于胰腺下缘的肠系膜上静脉以右探寻胰十二指肠下前动脉,并以此血管为标志由胰腺钩突部分离胰腺(图1b)。将胰十二指肠前动脉弓予以暴露保护后行DPPHR后的术野形态见图1c。手术时间平均(240±43)min;术中出血量平均(180±38)mL;术后平均住院(11.2±3.7)d。术中未损伤前动脉弓及胆总管血管,术后均未见明显活动性出血,术后胃肠道功能恢复良好,均未发生腹腔出血、腹腔感染、胃肠道排空延迟等。
2.2 解剖标本中胰十二指肠前动脉弓的走行与分型 通过解剖62例尸体标本,在胰腺体部上缘仔细游离腹腔干及肝总动脉各支,直至游离出胰十二指肠上动脉,胃网膜右动脉及其分支;在肠系膜上动脉起始部游离出胰十二指肠下动脉,并向胰腺钩突部进行游离。以临床腹腔动脉造影数据为对照参考,完整地获得胰十二指肠前动脉弓的走行及吻合情况(图2)。
结果显示,胰十二指肠前动脉弓的走行并非固定在十二指肠与胰头的沟槽内,也可形成于胰腺颈部前方,甚至于胰腺钩突部。同时在部分标本中,腹腔干动脉系统与肠系膜上动脉系统之间的动脉吻合并非均以“弓”的形式存在,也可以“短路”的形式存在。为方便理解、记录,我们提出以下四种分型:胰头动脉前弓型、胰头动脉短路型、胰头动脉小弓型、动脉弓与动脉短路混合型。(1)胰头动脉前弓型:即为经典的动脉弓,胰十二指肠上前动脉沿胰头十二指肠槽移行,分出支配十二指肠及胰头区域的动脉分支,这些分支向下移行与肠系膜上动脉来源的胰十二指肠下前动脉的分支相吻合。(2)胰头动脉短路型:胰十二指肠上前动脉沿胰腺前方向下移行,期间分出支配十二指肠及胰头区域的动脉分支,但胰十二指肠上前动脉主干与肠系膜上动脉来源的胰十二指肠下前动脉主干相吻合。(3)胰头动脉小弓型:胰十二指肠上前动脉以动脉干的形式沿胰腺前方向下移行,之后逐步分出支配十二指肠及胰头区域的动脉分支,这些细小分支再与肠系膜上动脉来源的胰十二指肠下前动脉的分支相吻合。(4)动脉弓与动脉短路混合型:胰十二指肠上前动脉分成两支,一支沿胰腺十二指肠沟槽下移行分支,并与肠系膜上动脉来源的胰十二指肠下前动脉的分支相吻合。另一支沿胰腺颈部前方向下移行,以干的形式支配胰腺体部或与肠系膜上动脉来源的胰十二指肠下前动脉主干相吻合。
为方便统计与分析,我们将胰十二指肠前动脉弓的走行予以量化测算,并提出A点、B点及a线、b线的概念(图2)。A点:胃十二指肠动脉由肝总动脉发出时的起始点;a线:A点至胃网膜右动脉由胃十二指肠动脉发出时的起始点之间的距离;B点:胃网膜右动脉由胃十二指肠动脉发出时的起始点;b线:B点至胰腺十二指肠沟槽线的最近距离。将解剖标本中胰十二指肠前动脉弓的分型及其年龄、性别、a线、b线间的距离进行分析,结果见表1。

图1 达芬奇机器人DPPHR胰头前方血管暴露(1a:术中胰十二指肠上前动脉暴露,黄色为十二指肠,红色为动脉;SPDA:胰十二指肠上前动脉,RGA:胃网膜右动脉,Duodenum:十二指肠;1b:胰十二指肠下前动脉暴露,红色为动脉,蓝色为门静脉;PV:门静脉,IPDA:胰十二指肠下前动脉;1c:胰头切除后的术野形态,黄色为十二指肠,绿色为胆总管,蓝色为门静脉,白色为已结扎的主胰管。PV:门静脉,MPD:主胰管,CBD:胆总管,Duodenum:十二指肠)
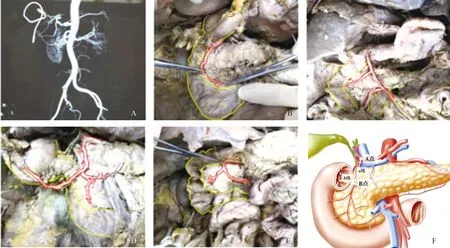
图2 胰十二指肠前动脉弓的走行与分型(A:腹部动脉血管造影显示胰十二指肠区域血管弓,图中可见前动脉弓存在,而后动脉弓以胰十二指肠上后动脉分支形成的终末动脉为主;B:胰头动脉前弓型;C:胰头动脉短路型;D:胰头动脉小弓型;E:动脉弓与动脉短路混合型;F:胰头前方动脉血管解剖A点、B点及a线、b线的示意图;红色为动脉,黄色为十二指肠)
表1 胰十二指肠前动脉弓的走行与分型
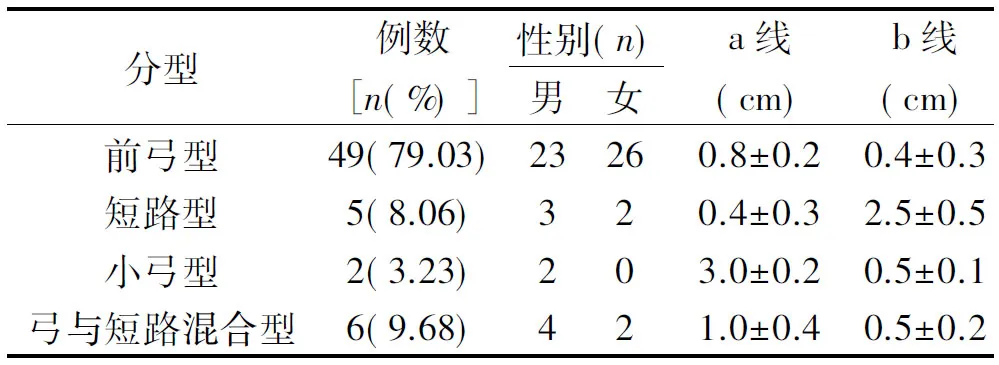
分型例数[n(%)]性别(n)男女a线(cm)b线(cm)前弓型49(79.03)23260.8±0.20.4±0.3短路型5(8.06)320.4±0.32.5±0.5小弓型2(3.23)203.0±0.20.5±0.1弓与短路混合型6(9.68)421.0±0.40.5±0.2
3 讨 论
随着微创外科技术的发展,传统开腹手术因手术创伤大、术中暴露时对周围器官与组织干扰较大、术后恢复差等缺点,已逐步被以腔镜、机器人辅助的微创外科所替代。由于腔镜能获得良好的放大效果、清晰的手术视野,从而为术者提供精细操作的条件。相较开腹胰腺切除术,腹腔镜胰腺切除术在出血、切口感染等并发症方面具有明显优势,且患者耐受性好,术后住院时间短,在使患者获益的同时也能优化社会医疗资源分配。
DPPHR在切除病变的同时保留消化道的完整性,提高了患者的生活质量,用以治疗慢性胰腺炎及其所致的肿块性病变;胰头部良性肿瘤,尤其与主胰管关系密切、无法局部切除的肿瘤[5];部分未侵及十二指肠、壶腹区域,有完整包膜的胰头部交界性肿瘤甚至低度恶性肿瘤[6-7]。
微创DPPHR的优势在于具有放大的视野,加强了术野辨识度,达芬奇机器人还具有立体视觉、直觉操作等优势,有助于精细操作,清晰辨认胆道、胰头及十二指肠区域的血供[4,8-9]。
DPPHR成功的重要步骤就是避免术中损伤胰十二指肠前动脉弓、后动脉弓,从而造成术中十二指肠、胆总管血供损伤被迫行胰十二指肠切除术,以及术后十二指肠区域缺血、胃肠道功能恢复不良[10-11]。十二指肠血供由胰十二指肠前后弓组成,术中沿胃十二指肠动脉向下解剖胰十二指肠上前动脉,沿十二指肠水平部上方靠近肠系膜上静脉右侧缘的区域解剖胰十二指肠下前动脉。后动脉弓位于胰头背面,由胰十二指肠上后动脉及胰十二指肠下后动脉组成后弓。DPPHR操作过程中,胰十二指肠动脉弓的保护关系到胰头和十二指肠区域的血供状况,动脉弓的离断损伤会造成术中出血,从而不利于术野暴露,影响手术进度,甚至影响手术的安全施行[12]。因此术前及微创手术中血管的有效探查与暴露,显得格外重要。
本文中我们重点讨论胰十二指肠前动脉弓的解剖情况及其在术中的作用,主要基于以下考虑:(1)我们的尸体解剖标本发现胰十二指肠前弓与后弓相比,前弓的动脉血管直径明显粗于后支,且其分支血管明显较后支丰富,因此考虑前弓为优势血管弓,支配区域广。(2)胰十二指肠后弓位置相对固定,多沿胰十二指肠后方的沟槽边缘走行,变异较少,术中容易保护。(3)胰十二指肠后弓在部分标本中并未以完整弓或吻合支的形式存在,即其以终末动脉血管的形式供给胰十二指肠后方区域。因此,文中我们重点探究胰十二指肠前动脉弓的解剖特点。本胰腺外科中心完成了9例微创DPPHR,腹腔镜或机器人辅助下DPPHR在技术上是可行的,具备有效的安全性与可靠性;且微创手术具有放大的视野,操作更精细,但出于手术安全性考虑仅对标志性血管进行解剖分离,不能全程暴露血管弓分支与汇合情况,为了进一步认识胰十二指肠区域的血管解剖,我们再次回到解剖教研室进行解剖学习,从而获得直观经验。通过对标本胰头区域血管解剖后发现,并非所有胰十二指肠上前动脉及胰十二指肠下前动脉均以弓的形式存在,且血管走行也存在差异。针对不同的血管吻合情况,我们将其分为4种亚型,并定义a线、b线两类线条的标记,目的在于呈现胰头区域血管走行,希望得到胰腺外科医生的重视;利于将胰十二指肠前方血管进行量化标记,从而协助定位术中胰腺的切缘,保护胰头区域动脉血管;避免出现血管损伤或十二指肠缺血。
综上所述,随着外科医师手术经验的积累及微创器械设备的革新,微创DPPHR将逐步发挥其优势,保留器官功能,精细解剖,减少术中出血,且手术创伤小,术后康复快;熟练掌握胰头区域的血管解剖特点有助于微创DPPHR的顺利开展。
猜你喜欢
昆明医科大学学报(2020年11期)2020-12-28 00:47:20
医学新知(2019年4期)2020-01-02 11:03:52
学生天地(2019年28期)2019-08-25 08:50:54
基层中医药(2018年7期)2018-12-06 09:25:46
中国医学影像学杂志(2018年9期)2018-10-17 01:27:12
数学物理学报(2018年1期)2018-03-26 08:16:36
腹腔镜外科杂志(2016年12期)2016-06-01 12:10:09
中南医学科学杂志(2015年5期)2015-12-27 19:24:20
肝胆胰外科杂志(2015年1期)2015-02-27 11:11:36
西南军医(2015年4期)2015-01-23 01:19:04