
可简便调幅的剑杆织机引纬机构参数特征
2019-10-09 09:23:20周香琴顾叶琴吴震宇
纺织学报 2019年9期
周香琴, 顾叶琴, 吴震宇
(1. 浙江理工大学 教育部现代纺织装备技术工程研发中心, 浙江 杭州 310018; 2. 万利纺织机械研究院, 浙江 杭州 311243)
剑杆织机的引纬系统负责将纬纱从梭口的一侧引到另一侧,实现与经纱的交织,其中剑头带着纬纱穿越梭口的运动是剑杆织机引纬过程中的主要运动,也是决定剑杆织机性能的关键运动。驱动剑头运动的机构称引纬机构,其类型很多,有凸轮机构、连杆机构、螺旋机构等,随着织机速度的提高,其中球面连杆引纬机构越来越受欢迎,目前Sulzer公司生产的G6300型剑杆织机、Picanol公司生产的GT-max、GAMA、Opti剑杆织机的引纬机构均属球面连杆引纬机构,对该引纬机构的运动特征、载荷特征等研究不断深化。分别针对球面连杆引纬机构的剑头运动规律[1-2]、引纬机构运动精确度[3]、引纬机构载荷特征[4-5],构件弹性动力学仿真[6]、通过减轻引纬机构中高速运动构件的惯性载荷实现剑杆织机提速[7]等开展研究。引纬运动规律与纬纱张力变化规律关系密切[8-9]、引纬运动工艺参数的设置直接影响剑头交接纬纱的成功率[10]。在引纬机构的运动学设计中,凸轮引纬机构可以根据剑头的运动规律需求设计凸轮廓线,满足引纬工艺的要求,连杆机构只能通过调整构件的结构参数,部分地满足要求,引纬曲线无法随意设计。其中文献[1]详细探讨了根据引纬运动曲线中选纬时刻、进梭口时刻以及门幅等关键参数设计引纬机构的结构参数,文献[8]详细探讨了不同引纬运动规律对纬纱张力变化的影响,文献[10]详细探讨了提高剑头交接成功率的引纬工艺参数设置。这些都是从织造工艺要求出发,研究引纬机构参数与剑头运动性能之间的关系。
剑杆织机引纬系统还包含一些辅助运动,如纬纱选择、纬纱剪切、纬纱释放等等。当织物幅宽变化时,与剑头运动相关的一系列动作执行装置在织机上的位置也需要随之改变,设备调整工作量较大。为减少调整织物幅宽时,设备调整的工作量,本文拟通过引纬过程中各动作的关联性分析,提出满足织机调幅前后剑头辅助动程和纬纱交接时刻的剑头位置保持不变的引纬机构设计新准则,通过引纬机构的运动学分析和论证,提炼符合上述设计准则的引纬机构参数特征,为设计新的引纬机构提供方法,减少改变织造幅宽时的设备调整工作量,提高工作效率。
1 引纬运动工艺特征分析
1.1 引纬运动过程
图1示出引纬过程示意图。目前,绝大部分剑杆织机由双侧剑杆共同完成引纬,左剑头在左侧引纬机构的驱动下,从起始位置T1开始,沿导轨运动,到达位置T2时,接上由选色器选中、从储纬器退解出来的纬纱;到达位置T3时,剑头进入梭口,纬纱与布边连接端被纬纱剪刀剪断,左剑头带着纬纱继续向织幅中间T4位置(即左剑头最远位置)运动;右剑头在右侧引纬机构的驱动下,从起始位置T7沿导轨向织幅中间位置T5(即右剑头最远位置)运动,左右剑头在梭口中间位置(T4、T5)相遇,交接纬纱后各自返回。当右剑头运动到T6位置时,在纬纱释放装置的作用下右剑头释放纬纱(见图1(c)),右剑头离开梭口;左右剑头继续运动,回到各自的起始位置,完成一次引纬。左剑头在起始位置附近由吸尘装置清除残留在钳纬口上的纤维(见图1(b)),防止下次夹纱失败。
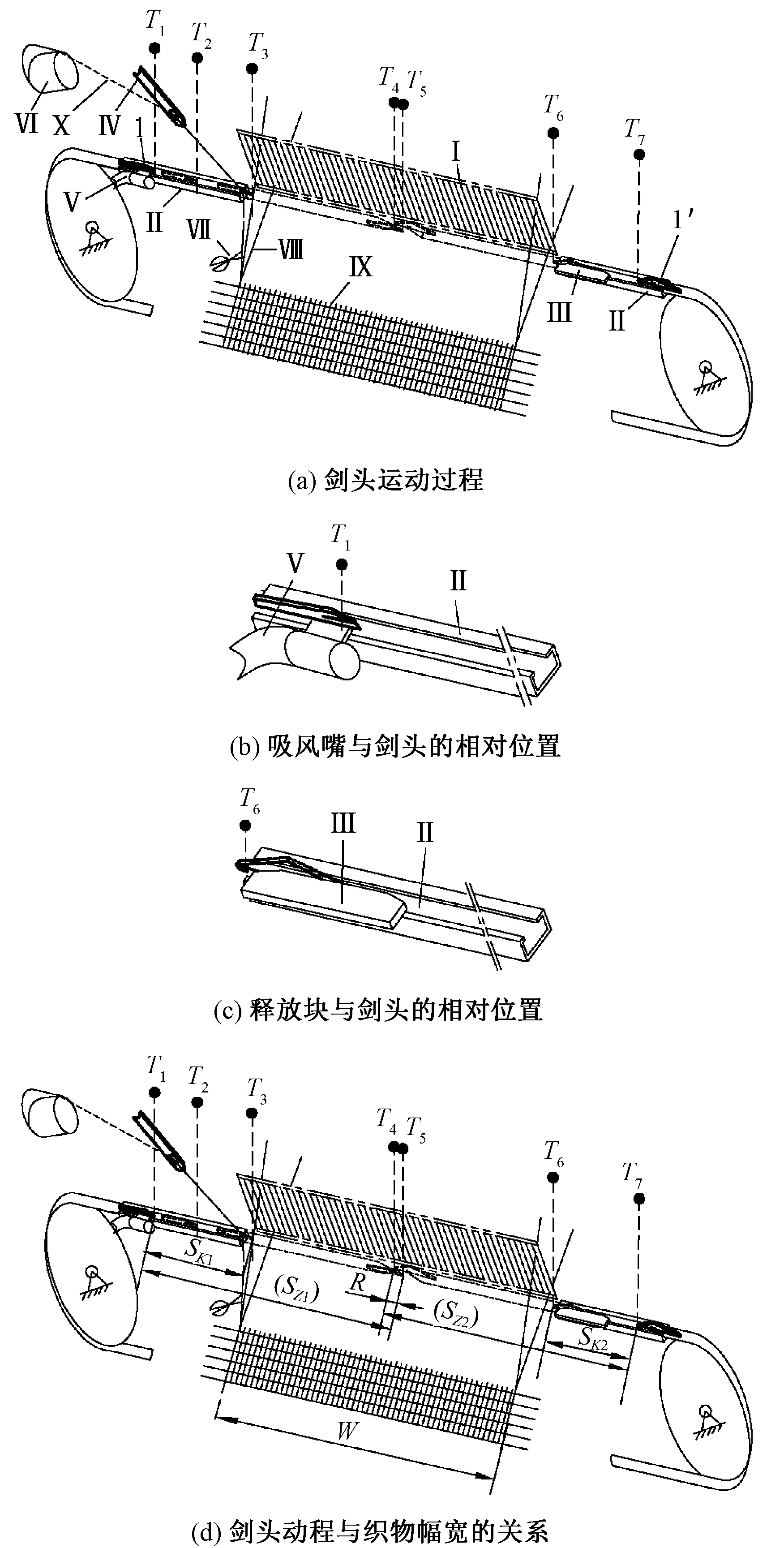
1—左剑头;1′—右剑头;Ⅰ—钢筘;Ⅱ—导轨;Ⅲ—纬纱释放装置;Ⅳ—选色器;Ⅴ—吸尘装置;Ⅵ—储纬器;Ⅶ—纬纱剪刀;Ⅷ—经纱;Ⅸ—布面;Ⅹ—纬纱;T1~T7引纬过程中的工艺位置点。图1 引纬过程示意图Fig.1 Weft insertion process.(a) Process of rapier motion; (b) Relative position between dust collector and rapier; (c) Relative position between releasing bar and rapier; (d) Relationship between cloth width and motion process of rapier
左右剑头的运动总动程SZ1和SZ2包含2部分,梭口内的动程(即有效动程)和梭口外的动程(SK1和SK2,即辅助动程),见图1(d)。要实现纬纱的正常交接,左右剑头在织幅中间相遇,需要有一个重叠量R,因此织物筘幅W与剑头动程之间的关系需满足:
W=SZ1+SZ2-SK1-SK2-R
剑头进梭口的时刻受筘座运动及开口运动的限制,在打纬和开口运动允许的情况下,剑头进梭口越早越好。因此针对一种机型,进梭口的时刻一般是定值。
剑头在梭口外运动时,需要完成与剑头运动位置匹配的动作有:送纬剑钳纬口的清洁动作、送纬剑接纬动作、纬纱剪切动作、接纬剑的纬纱释放动作等。一般情况下,织物幅宽由钢筘确定。织物幅宽越宽,需要剑头有效动程越大,辅助动程也越大。执行引纬辅助动作的执行装置的位置也需要根据钢筘边缘位置的变化而调整,如吸尘装置、选色器、纬纱释放装置的位置。因此织物幅宽变化时,需要调整一系列的附件相对于钢筘边缘的位置,这是一项动作繁琐、要求精细的工作。
1.2 剑头运动规律曲线上的工艺位置分析
在引纬过程中,剑头有3个比较重要的位置,即剑头进梭口时刻、纬纱交接时刻和剑头出梭口时刻的位置。在引纬运动规律曲线上分别对应K、Z、V点,剑头运动规律如图2所示。对应的剑头位移规律曲线上的坐标点为(θK,SK)、(θZ,SZ)、(θV,SV)。在很多剑杆织机引纬机构中,存在以下关系式:
即剑头的运动规律关于轴线θ=θZ对称,剑头运行的最远位置在主轴处于θZ处,并且此时实现纬纱交接。
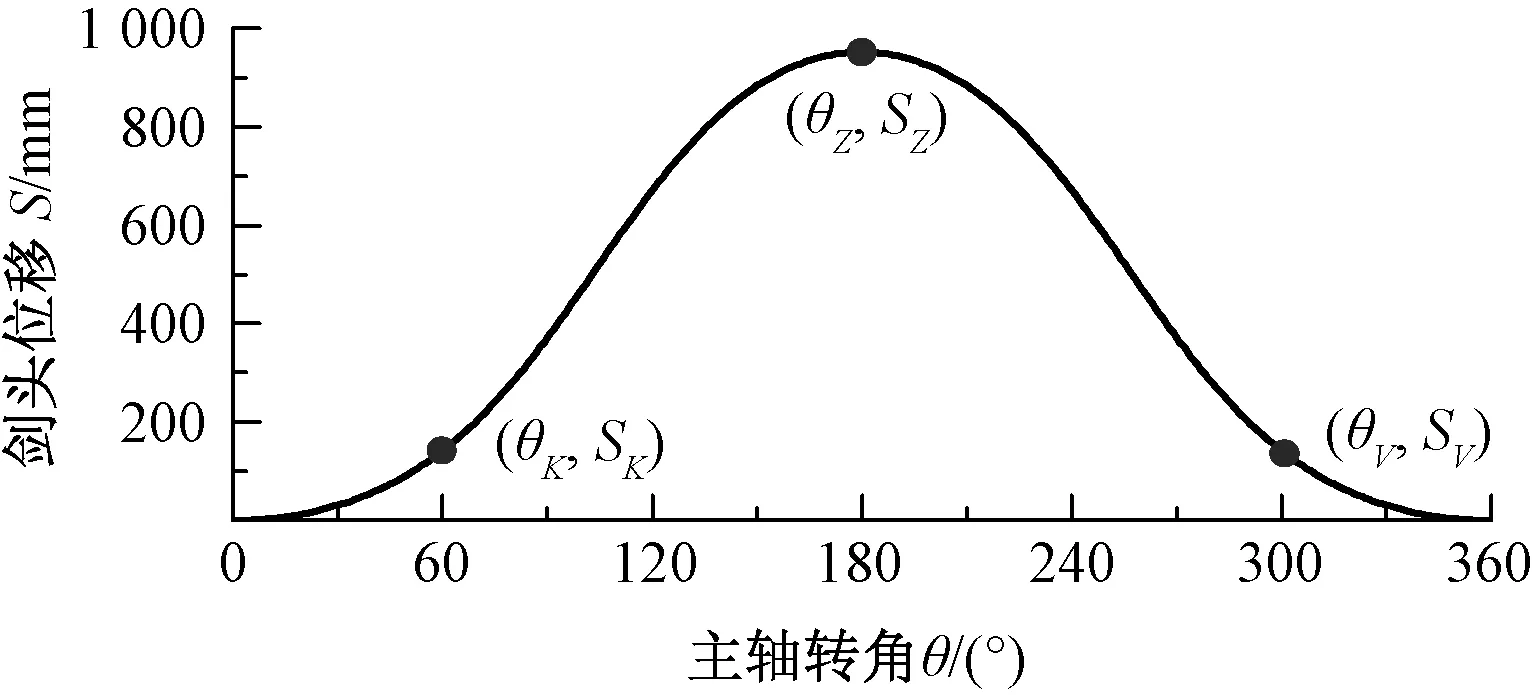
图2 剑头运动规律曲线Fig.2 Motion curve of rapier
1.3 引纬机构调幅工艺特征
假设剑头进梭口时刻不变,若剑头的辅助动程不随筘幅变化而改变,即剑头起始位置相对于钢筘边缘的距离不变,这将会为剑杆织机调幅带来很多便利,减少很多调整动作,如不需要调整剑头清洁装置及纬纱释放装置在导轨上的相对位置。织物幅宽调整过程中,若纬纱交接时刻剑头位置保持不变,那么改变门幅只涉及剑头的起始位置的变化,剑带与剑轮的相对位置不需要调整。因此,为简化调整织物幅宽的过程,本文在常规引纬机构设计方法的基础上,提出2条引纬机构设计新准则:1)调整织物幅宽前后,剑头辅助动程(SK1、SK2)保持不变;2)在调整织物幅宽过程中,纬纱交接时刻剑头位置保持不变。
2 空间连杆引纬机构
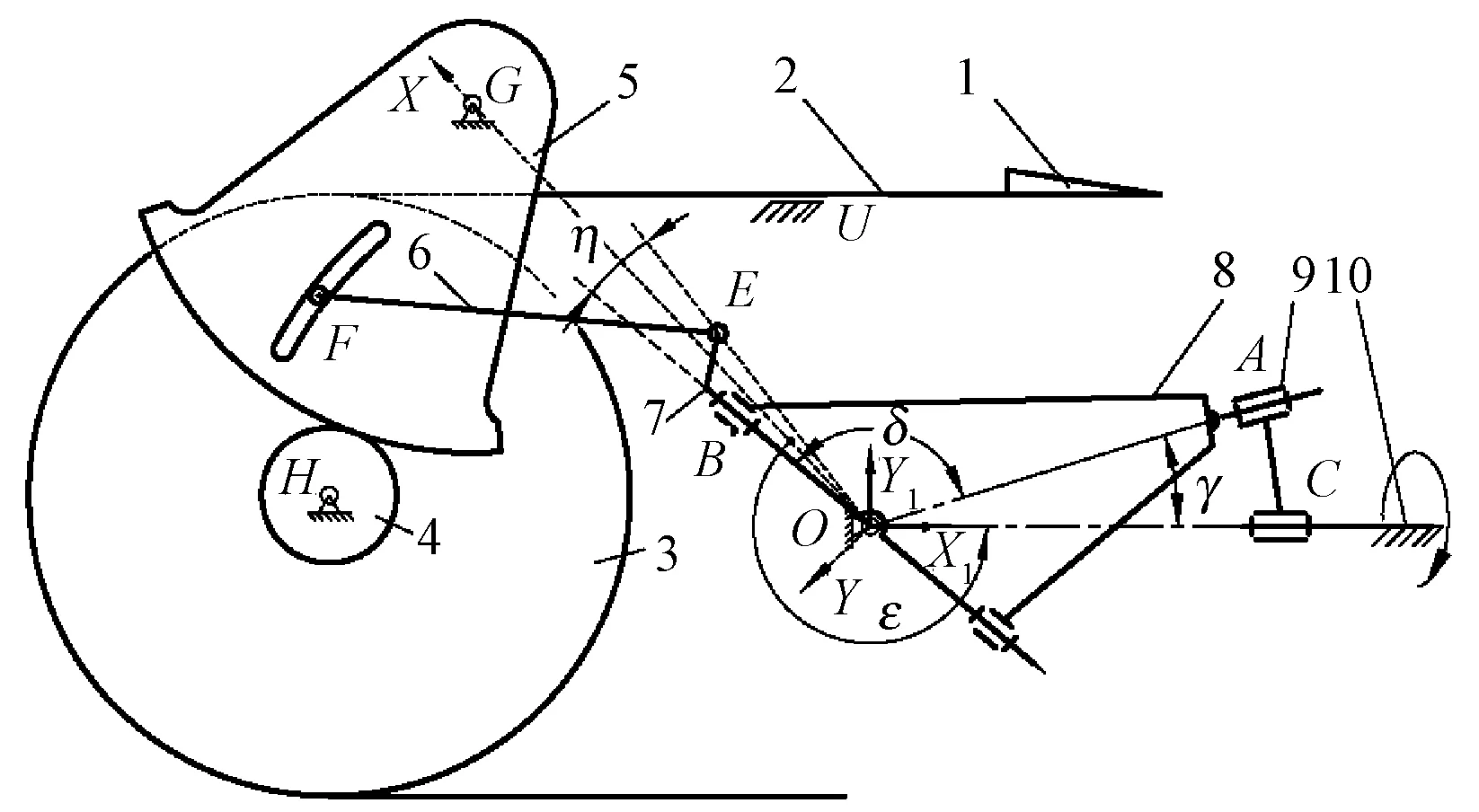
图3示出一款剑杆织机空间连杆与平面连杆组合的引纬机构。该机构由4个子机构串联而成。即:机构一,球面连杆机构,由固定于主轴上的曲柄、空间连杆、摇摆座、箱体组成,实现主轴的旋转运动转化成摇摆座的摆动;机构二,平面连杆机构,由摇摆座、平面连杆、扇形齿轮和箱体组成,实现引纬筘幅的调整,称引纬调幅机构;机构三,齿轮传动机构,由扇形齿轮、小齿轮组成,实现引纬动程的放大;机构四,齿轮齿条机构,由固连在小齿轮上的传剑轮、剑带组成,实现往复旋转运动转化成固连在剑带上的剑头的往复直线运动。剑杆织机正常工作时,固定在主轴上的曲柄绕轴线转动,通过机构一、机构二、机构三和机构四,带动剑头往复直线运动,实现剑杆织机的循环引纬。通过调节引纬调幅机构中F点在扇形齿轮上的位置,获取不同织物幅宽需要的引纬动程。
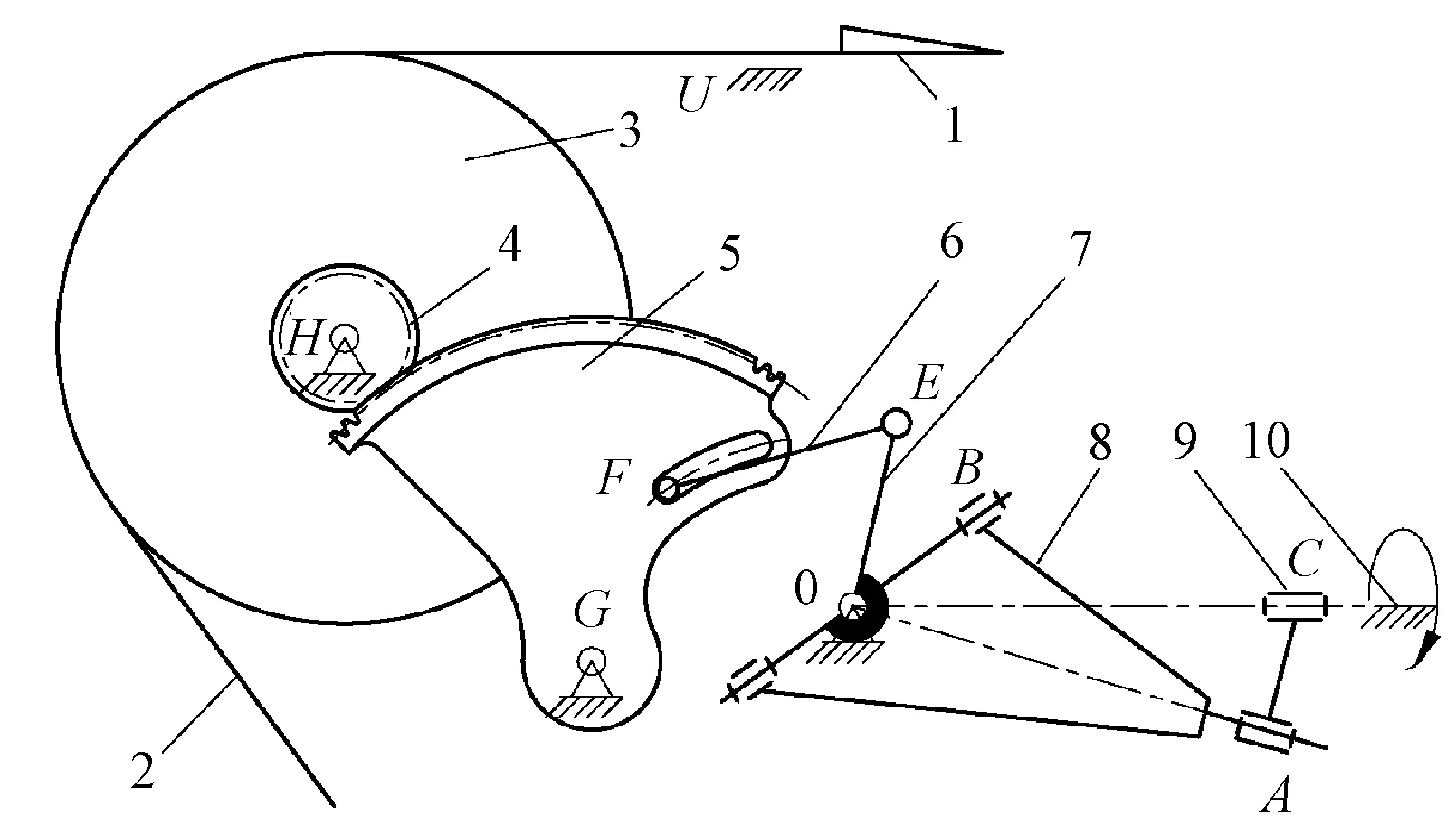
1—剑头;2—剑带;3—剑轮;4—小齿轮;5—扇形齿轮;6—平面连杆;7—摇摆座;8—空间连杆;9—曲柄;10—箱体。图3 剑杆织机球面连杆引纬机构简图Fig.3 Spatial linkage used for weft insertion in rapier loom
3 机构运动分析
以O点为坐标原点,以OC为X1轴建立O-X1Y1Z1坐标系,以OG为X轴建立O-XYZ坐标系,在C处建立C-X2Y2Z2坐标系与O-X1Y1Z1平行。图4为引纬机构分析示意图。以CA与Y2轴负向重合为起始位置,CA在C-Y2Z2平面内以ω角速度逆时针方向绕X2轴整周旋转,以θ角表达CA的运动位置(即主轴转角),A′为A点在Y2轴上的投影。图中有方向的角度以逆时针方向为正,各机构参数符号含义见图4。
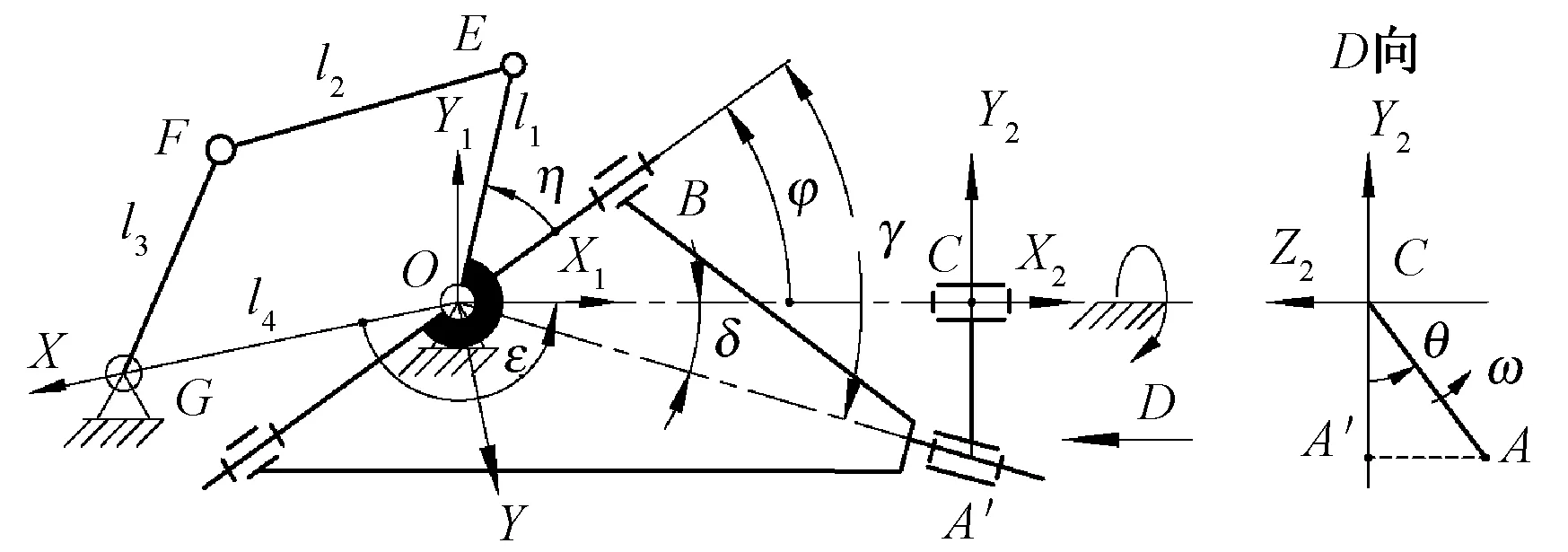
图4 引纬机构分析示意图Fig.4 Schematic view of weft insertion mechanism
3.1 球面四连杆机构运动分析
已经有文献[2]对机构一进行过详细的运动学分析,获得机构运动方程:
cosγ-cosδcosφ+sinδsinφcosθ=0
(1)
根据式(1),可获取φ与θ的对应关系。在此不详细介绍,为描述方便,假设φ与θ的关系式为:
φ=f1(θ,δ,γ)
则构件7摇摆座的动程:
Δφ=f1(θ,δ,γ)-f1(0,δ,γ)
3.2 平面四连杆机构运动分析
引纬机构中的机构二为平面四连杆机构OEFG,该机构可能存在2种状态,见图5。在O-XY坐标系下建立矢量方程:

(2)
由图4可知:μ1=φ+η+ε-360°
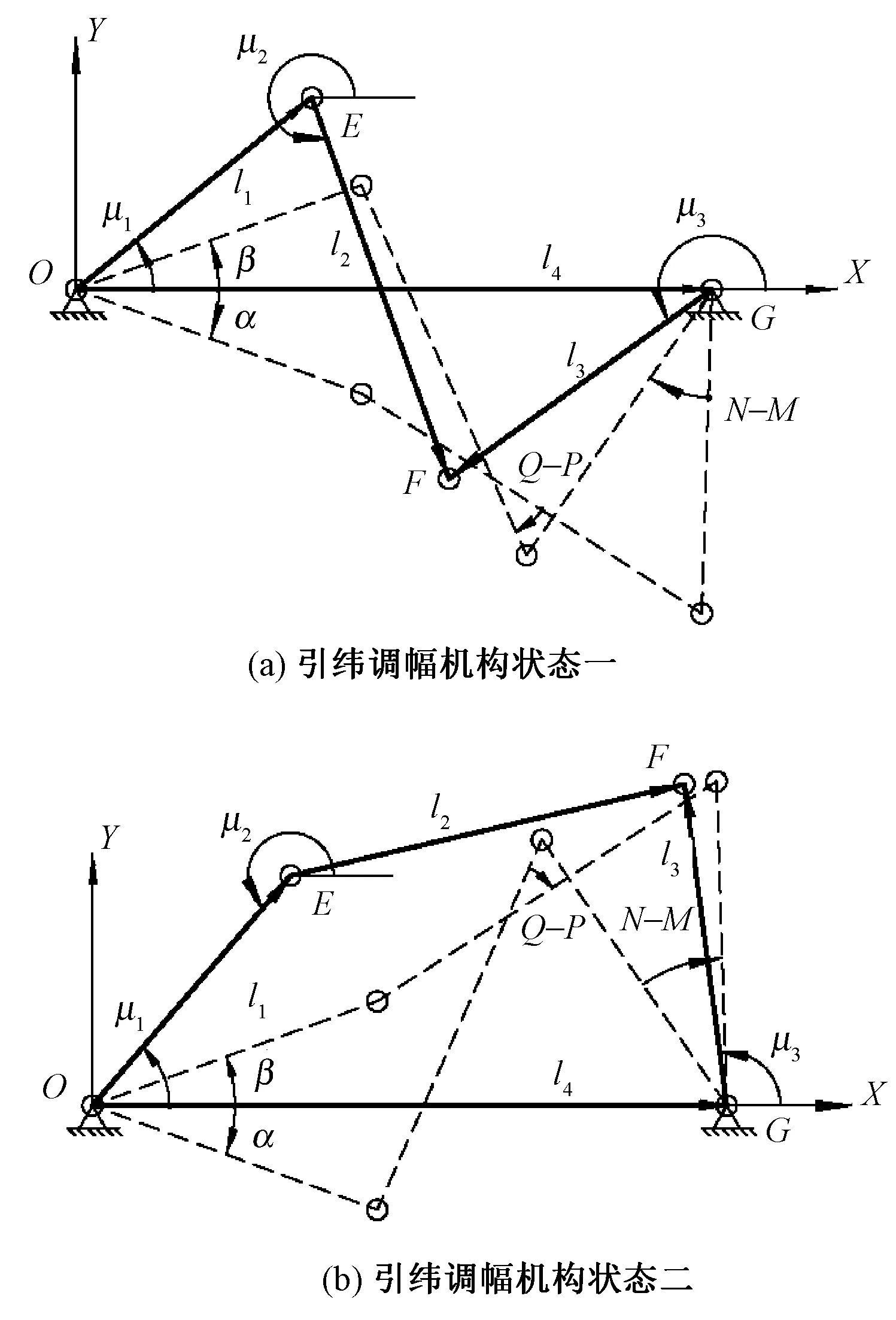
图5 引纬调幅机构分析示意图Fig.5 Analysis schematic view of adjusting mechanism for weft insertion. (a) The first location of adjusting mechanism for weft insertion; (b) The second location of adjusting mechanism for weft insertion
矢量方程(2)对X、Y轴投影得:
(3)
式中:μ1为自变量,μ2、μ3是μ1的函数。l1、l2、l3、l4为结构参数,不随μ1变化。其中l3可以通过调节F点在扇形齿轮上的位置改变。根据引纬工艺的要求,机构OEFG为双摇杆机构,μ3与μ1的运动曲线具有相同的对称位置。由式(3)求解得:
(4)
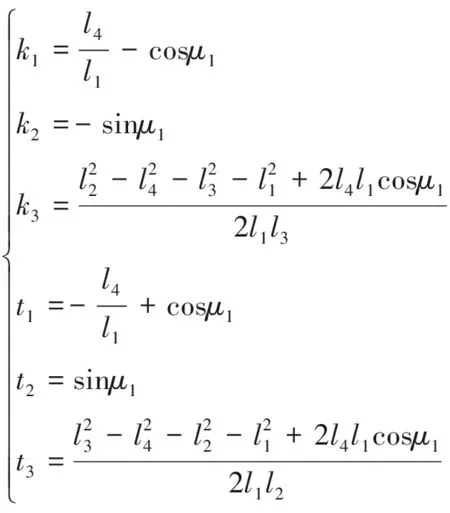
当l1≠l4时,
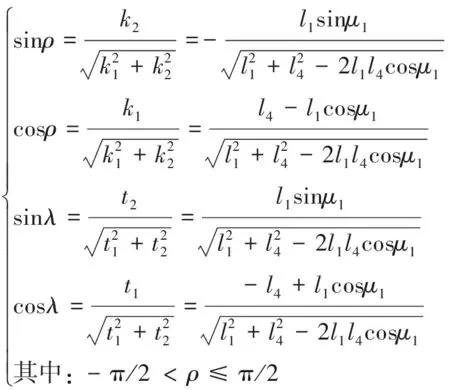
(5)
根据式(5)可得:
λ=180°+ρ
(6)
式(5)代入式(4)整理得:
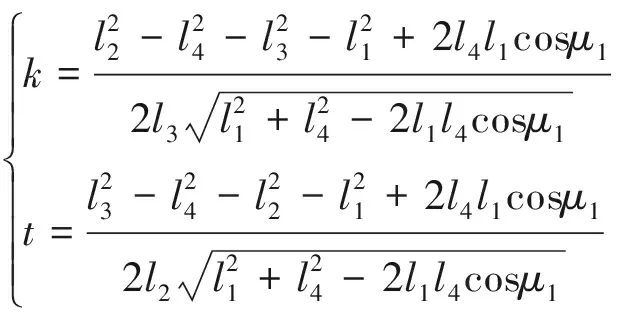
(7)
根据机构的初始位置及机构运行的连续性取舍式(7)中的正负号。为便于讨论,把该求解过程假设为函数:
μ3=f2(θ,δ,γ,η,ε,l1,l2,l3,l4)
则构件9曲柄的运动动程为:
S=Δμ3ir
(8)
式中:i为齿轮传动机构速比,r为传剑轮半径。
表1示出机构参数。根据式(8)及表1参数计算获得剑头的运动规律见图6中曲线S。
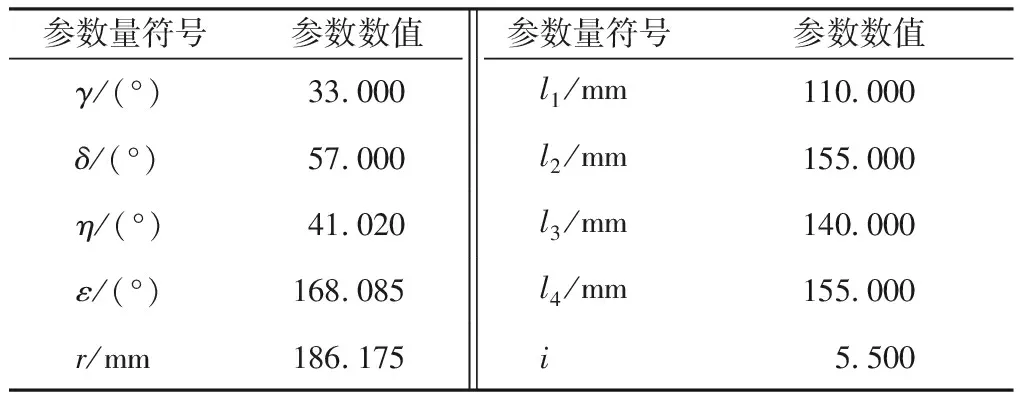
表1 机构参数Tab.1 Parameters of mechanism
3.3 剑头运动规律曲线组成
剑头的运动规律曲线S可以看成是由机构一和机构二的运动规律叠加而成,结果见图6。假设曲线S(Y)为机构一经动程放大后产生的剑头运动规律曲线,不受机构二的影响;S(P)为机构二经动程放大后产生的剑头运动规律,不受机构一的影响。
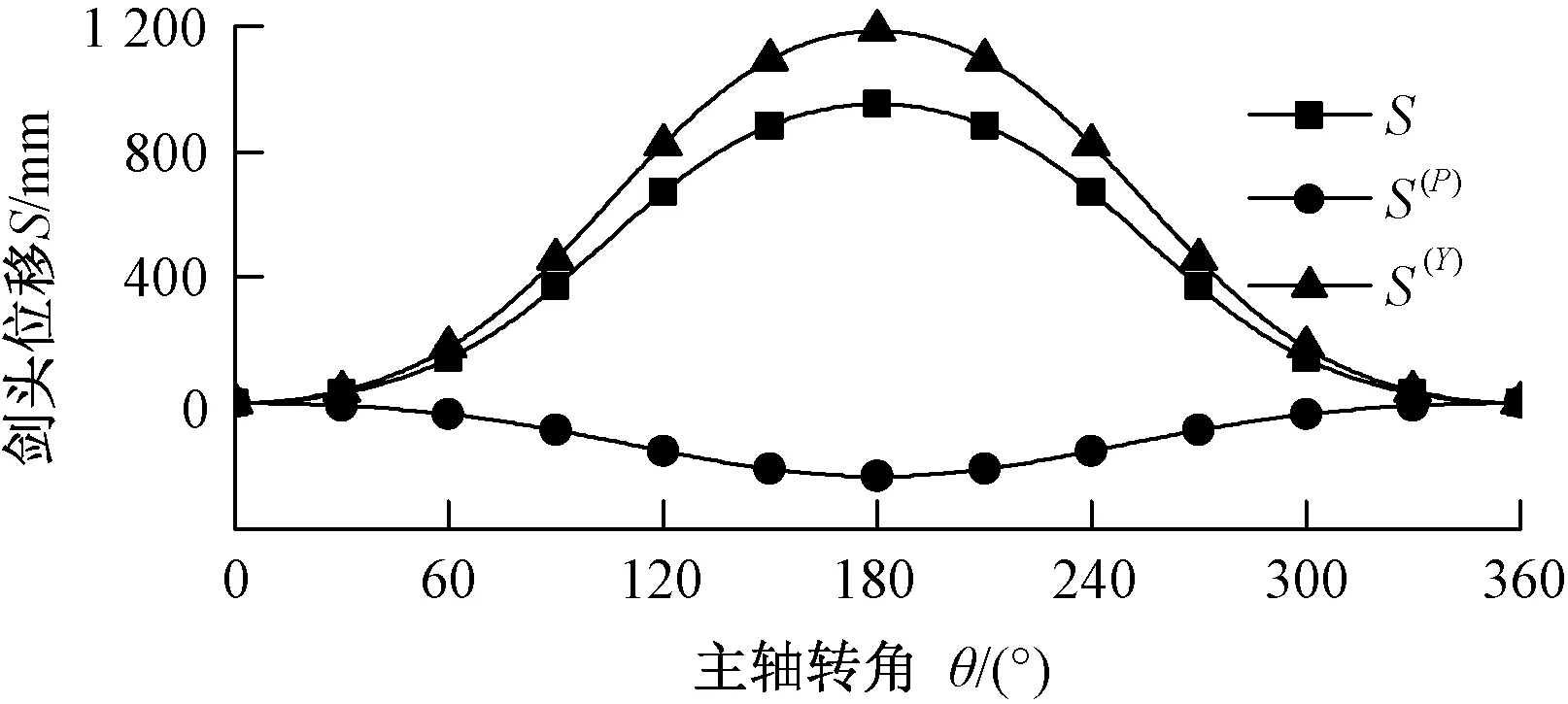
图6 剑头运动规律曲线的组成成分示意图Fig.6 Composition of rapier motion curve
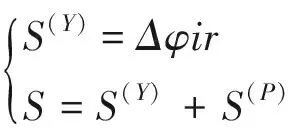
则:S(P)=(Δμ3-Δφ)ir
文献[2]已经证明S(Y)关于θ=180°轴线对称。引纬调幅机构主动件和从动件均作摆动的情况下,曲线S(P)与S具有相同的对称轴线。

4 引纬调幅机构设计
4.1 剑头辅助动程不变的引纬机构设计
假设:
则剑头辅助动程:
SK=(N-M)ri
根据式(7)可得:
(9)
当β=-α时,
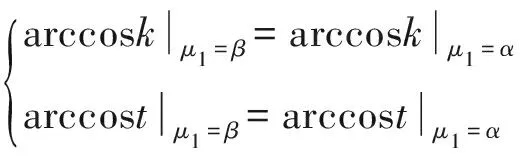
(10)
根据式(10)可得:
N-M=Q-P
SK=(Q-P)ri
由此可见,剑头辅助动程SK与机构二的参数无关,只与机构一的参数θ、δ、γ有关,因此只要设计引纬调幅机构的主动摆杆起始位置与进梭口位置相对机架位置对称,即图5中的α=-β,即可实现剑头辅助动程不随筘幅的改变而改变。
4.2 交接纬时剑头位置不变的引纬机构设计
当主轴处于180°时,左右剑头完成纬纱的交接,若此时,调节点F只允许在以E为圆心的圆弧上变化,那么无论F在扇形齿轮上的位置如何改变,扇形齿轮的位置保持不变,即剑头的位置保持不变,因此在扇形齿轮上,设计一圆弧形长槽,圆弧半径为l2,当主轴处于180°时,圆弧的圆心位于铰接点E上,具有这样机构参数的引纬调节机构,即可实现调幅时,纬纱交接时刻剑头位置保持不变的要求,极大地方便了织物幅宽的调整。
5 应用案例
表2示出1组符合前文提出的引纬机构设计新准则的织机引纬机构参数,该引纬机构简图见图7,引纬运动规律曲线见图8。
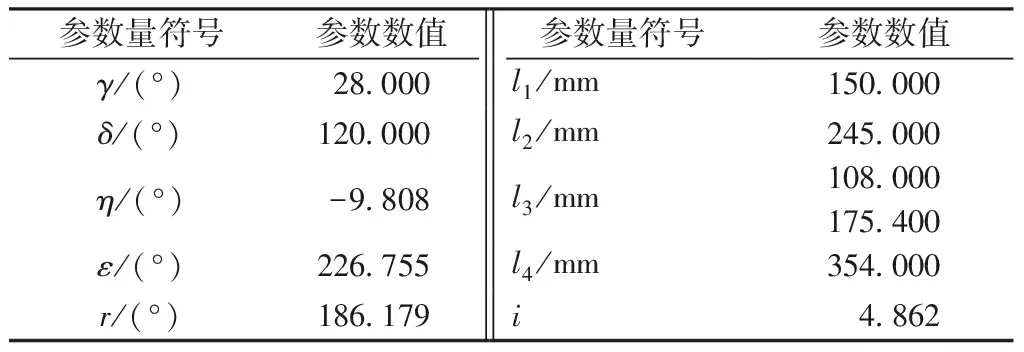
表2 机构参数Tab.2 Parameters of mechanism

1—剑头;2—剑带;3—剑轮;4—小齿轮;5—扇形齿轮;6—平面连杆;7—摇摆座;8—空间连杆;9—曲柄;10—箱体。图7 引纬调幅机构实例Fig.7 Example of adjustment mechanism for weft insertion
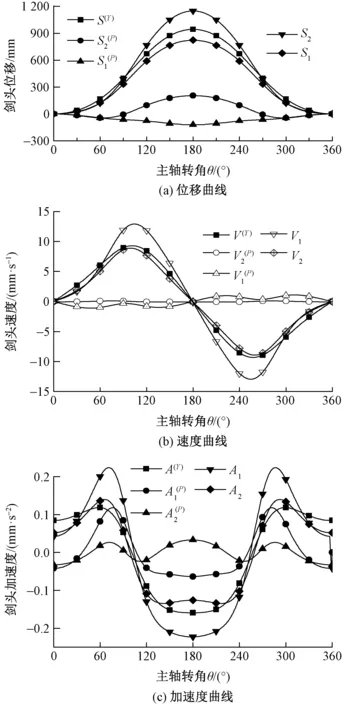
注:对应对应l3=175.400 mm;i1、i2分别为系数。图8 具有固定空动程的引纬机构运动规律曲线Fig.8 Rapier curve with unchanged rapier assistant displacement. (a) Curve of rapier displacement; (b) Curve of rapier velocity; (c) Curve of rapier acceleration
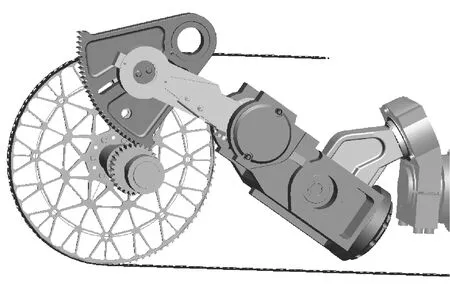
图9 应用案例的三维模型Fig.9 3-D Model of application case
图10 应用案例实物Fig.10 Physical display of application case
6 结 论
1)引纬机构中有一平面连杆调幅机构,属双摇杆机构,机架杆长与主动摆臂杆长不相等(特征1)。
2)引纬调幅机构中,主动摆杆起始位置与进梭口位置相对机架位置对称(特征2)。
3)当织机主轴处于180°位置时,引纬调幅机构上的F点的调整轨迹处于以E为圆心,l2为半径的圆弧上(特征3)。
满足参数特征1、2的引纬机构,具有调幅前后剑头辅助动程保持不变的特征,调幅时,引纬通道上的吸尘装置、纬纱释放装置在导轨上的安装位置不需要调整;满足参数特征1、3的引纬机构具有调幅过程中交接纬纱时刻剑头位置保持不变的特征,调幅时剑轮与剑带的相对位置不需要调整。
FZXB
猜你喜欢
棉纺织技术(2023年9期)2023-10-27 00:57:45
棉纺织技术(2022年3期)2022-11-21 02:21:19
纺织报告(2021年4期)2021-06-21 07:36:16
产业用纺织品(2021年1期)2021-04-13 02:09:40
纺织高校基础科学学报(2020年4期)2021-01-07 11:18:30
天津职业院校联合学报(2018年8期)2018-09-13 02:30:56
纺织机械(2016年2期)2016-03-11 02:13:45
纺织机械(2015年7期)2015-04-17 03:29:38
丝绸(2014年4期)2014-02-28 14:55:02
网络安全与数据管理(2011年12期)2011-02-28 05:10:28
