
基于计算机视觉的室外停车场车位检测实验设计
2019-10-08 06:15:16肖永菲杨玉成余江浩
实验技术与管理 2019年7期
张 乾,肖永菲,杨玉成,余江浩,王 林
基于计算机视觉的室外停车场车位检测实验设计
张 乾1,2,肖永菲1,3,杨玉成1,3,余江浩2,3,王 林3
(1. 贵州民族大学 数据科学与信息工程学院,贵州 贵阳 550025;2. 贵州民族大学 教务处,贵州 贵阳 550025;3. 贵州省模式识别与智能系统重点实验室,贵州 贵阳 550025)
为便于汽车驾驶员在室外停车场中寻找可用空车位,基于以数据采集、图像处理和目标检测等过程的计算机视觉,开发了室外停车场车位检测实验。该实验将Haar-like特征描述和车位中颜色能量变化作为判别模型的数据输入,选取随机森林作为车位可用状态的判别模型。通过在国际公开数据集PKLot上进行实验,对可用车位的检测准确率的均在91%以上;在自建的GZMU-LOT上进行实验,可用空车位的检测准确率达92.21%。
车位检测;计算机视觉;实验设计;室外停车场
城市停车难是令汽车驾驶员苦恼的问题,在停车场中寻找可用车位也是比较困难的。采用现代信息技术快速、准确、醒目地告知驾驶员可用车位的具体位置是一个重要的课题[1]。目前停车场可用车位的检测方法可归纳为基于传感器的方法和基于计算机视觉的方法。
基于传感器的可用车位检测方法是通过在车位安装传感器设备和装置,采集数据后传送到后台服务器,经服务器处理数据后显示车位的可用状态信息。基于传感器的方法又可以分为地感线圈检测技术[2]、超声波检测技术[3]、红外检测技术[4]、动态称重技术[5]、地磁传感器检测技术[6]。基于传感器的方法存在安装程序繁琐、硬件成本高等缺点,但也有不易受环境干扰、数据传输可靠性高等优点。
基于计算机视觉的可用车位检测是一种新技术,是通过摄像头等图像采集设备对场景进行拍摄获得图像并进行数字图像处理,结合统计模式识别或者深度学习的方法对可用车位进行检测和显示。基于计算机视觉的方法又可以分为车位线标记法[7]、双目立体法[8]、光带投影法[9]和运动立体测距法[10]等。基于计算机视觉的检测方法容易安装、成本低,但是该方法容易受到光照条件的变化、混乱的背景、运动目标的影子、物体与环境之间或者物体与物体之间的遮挡等因素的干扰。由于计算机视觉技术在可用空车位检测中的方便性,因而受到计算机视觉、模式识别研究人员的关注和重视。
1 可用空车位检测实验设计
室外停车场中可用车位的检测是一种计算机应用工程。本文以计算机视觉理论为基础,以软件工程方法为主线,进行停车场可用车位的实验设计。根据可用车位检测的目标,实验设计包括数据采集、区域特征描述、车位可用性判定等环节。
1.1 基于计算机视觉的数据采集和区域特征描述
目前,智能图像采集设备包括摄像头、摄像机、录像机、照相机和智能手机等。通过图像采集设备对室外停车场场景进行拍摄后,利用计算机视觉算法进行数据分析和挖掘,检测出图像中可用的车位信息。基于计算机视觉的室外停车场中可用车位检测实验流程如图1所示。
通过统计模式识别算法对视频采集到图像进行可用车位位置的区域统计特征描述是系统实验的首要关键步骤。在可用车位的区域特征描述方面,有小波变换、纹理信息、结构信息等统计方法。在室外停车场环境下,本文充分考虑了车位边界一般是通过白色的线将车位圈定的实际情况,采用了Haar-like特征[11]作为区域特征描述方法。
Haar-like特征最早应用于人脸检测和人脸特征描述,是一种经典的图像统计方法。Haar-like特征经过发展可以归纳为边缘特征、线性特征、中心特征和对角线特征等4种形式的特征。Haar-like特征模板内只有白色和黑色两种矩形,在传统的方法中定义该模板的特征值为白色矩形像素和减去黑色矩形像素和。在室外停车场的可用车位检测中,该方法体现了车位线和车位内部的对照情况,该特征描述方法具有可行性。本文在传统的Haar-like加入颜色能量变化特征,形成8种Haar-like原子结构,如图2所示。
1.2 车位可用性判定
采用集成学习的随机森林[12]方法判定车位的可用状态。随机森林是一种经典的集成学习方法,通常情况下,该方法以决策树作为基元模型:

随机森林通过在样本实例和样本属性上两个过程上随机采样的策略,有效控制了模型的过拟合风险。
2 实验仿真与结果
2.1 实验环境和实验数据集
实验环境为戴尔Inspiron 15-7560笔记本电脑,CPU为Intel i7-7500U,Windows 10 64位旗舰版操作系统,Matlab R2018a,openCV,索尼(SONY)HDR- CX680摄像机。
在室外停车场中,公开的可用车位检测数据集为数不多,据调研仅有PKLot[13]、CNRPark-Ext[14]、FMPH[15]等3个。本文选择其中的PKLot作为实验数据集之一。另外,从贵州民族大学花溪校区停车场录制了大量视频作为实验素材,构成了GZMU-LOT数据集。
(1)数据集PKLot。PKLot数据集发布于2015年,是计算机视觉、模式识别和智能交通领域公开测试的基准数据集之一。该数据集由2个停车场的图片组成,一个是PUCPR行政大楼前(简称PUCPR),另一个位于UFPR前面,后者由2个摄像机从不同角度拍摄,因此其分解为UFPR04和UFPR05两数据子集,图像的分辨率均为1280×720像素。图像拍摄的天气环境包括阴天、阴雨、晴天以及光照变化等,由于图像环境的复杂性,该数据集被作为可用空车位检测的基准数据集之一。
(2)数据集GZMU-LOT。GZMU-LOT是课题组在贵州民族大学花溪校区停车场,经过长时间录制和拍摄建设的一个用于室外停车中可用车位检测实验的数据集。目前,GZMU-LOT录制季节包括夏天、秋天和冬天,录制时段包括这3个季节中的部分时段的24 h,天气情况包括了晴天、雾、雨、阴天、雪天等天气状况。如果地面积雪将车位线覆盖,基于计算机视觉的方法将失效。
2.2 实验结果评价指标




在以上定义基础上,有:
和
2.3 结果
2.3.1 数据集PKLot
在PKLot数据集中有UFPR04,UFPR05和PUCPR等3个数据子集,基本情况如表1所示。
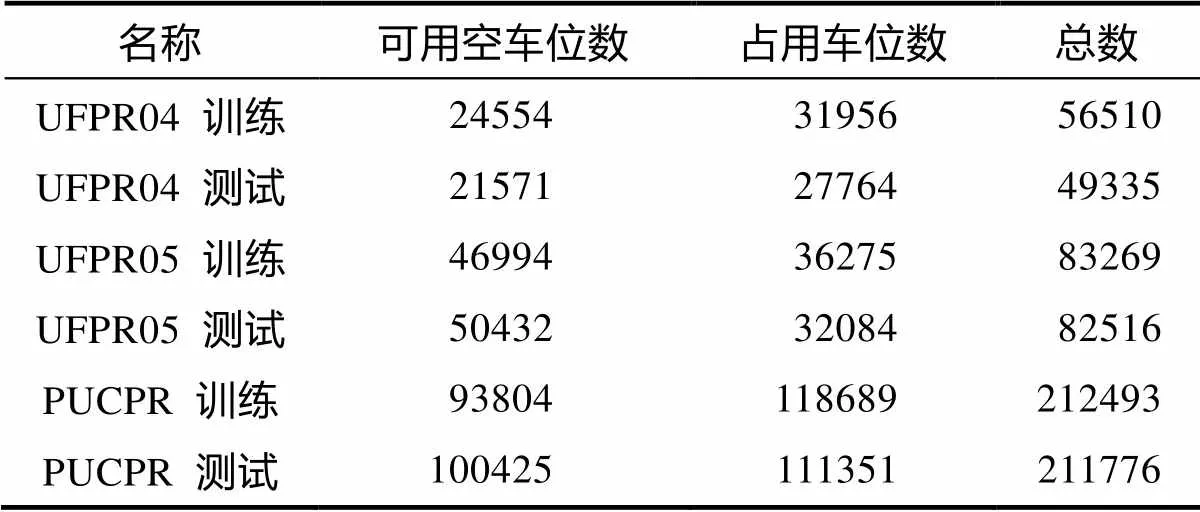
表1 PKLot数据基本情况 个
在UFPR04、UFPR05、PUCPR的训练集和测试集中,随机选择各自其中50%作为训练构建模型,余下的50%作为测试集,分别独立重复2次实验,分别记为UFPR04a,UFPR04b,UFPR05a,UFPR05b,PUCPRa和PUCPRb。在Haar-like作为特征、随机森林作为分类器的统计模式识别和计算机视觉实验手段下,得到表2所示的结果。
通过表2可以看出,最高的准确率为99.21%,最低的准确率为91.11%,均保证在90.00%以上。为进一步可视化实验效果,在PUCPR数据集上的实验效果如图3所示。

表2 在PKLot上实验结果

图3 在PUCPR数据集上实验效果图
2.3.2 数据集GZMU-LOT
GZMU-LOT包含多因素影响下同一停车场的车位情况,从该视频集中3个季节、不同天气、不同时段等因素中选取5000张图像进行实验,图像大小为1920×1080像素。在实验中随机选择20%,40%和50%作为训练集,剩下的全部作为测试集的实验参数配置方案进行,得到如表3所示的结果。可视化效果如图4所示。

表3 在GZMU-LOT上实验结果
注:图像总数5000张
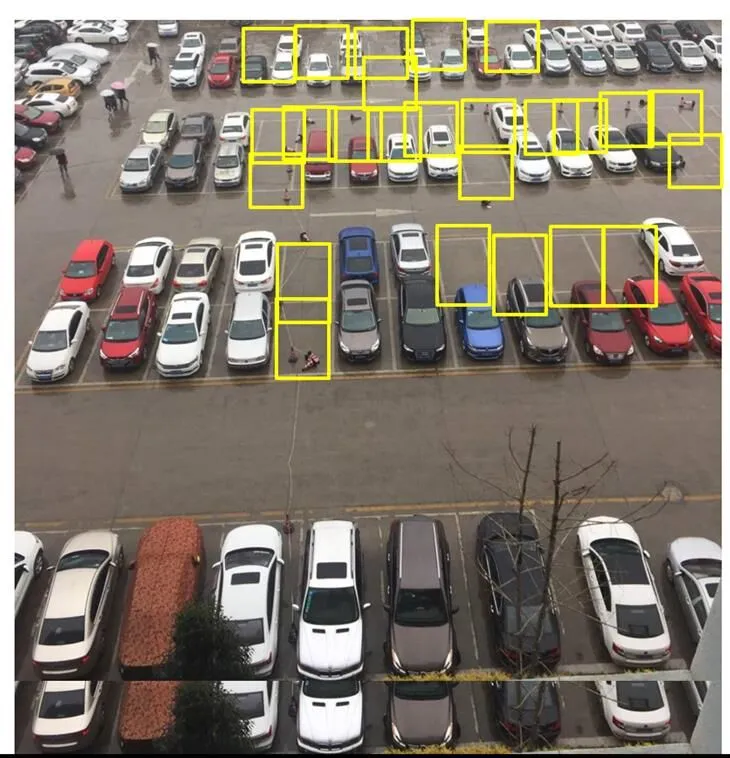
图4 在GZMU-LOT数据集上实验效果图
3 结语
利用计算机视觉和统计模式识别技术和PUCPR数据集、GZMU-LOT数据集进行复杂停车场可用车位实验,实验结果表明该方法具有可行性和高效性。该成果将转化到智能停车软件系统、微信公众号、手机APP等新媒体上。
[1] 安旭骁,邓洪敏,史兴宇.基于迷你卷积神经网络的停车场空车位检测方法[J].计算机应用,2018(4): 935–938.
[2] 王志超,刘波,汤亮,等.基于地磁感应的新型无线车辆检测器设计[J].计算机测量与控制,2014(11): 3837–3839.
[3] 何伟.基于超声波传感器的自动泊车车位补偿检测法[J].中国仪器仪表,2016(2): 47–50.
[4] 杨卫,李波,孙乔,等.基于热释电红外传感技术测距的时间差法研究[J].传感器与微系统,2013(4): 37–40.
[5] 沈裴裴,徐志玲,陈群,等.车辆动态称重模型建立与分析[J].测控技术,2015(3): 5–8.
[6] Mohd Sufiz I. Attendance Free Parking Counter Using Microprocessor With Magnetic Sensor[R]. Utem, 2009.
[7] TSCHENTSCHER M, KOCH C, KONIG M, et al. Scalable real-time parking lot classification: An evaluation of image features and supervised learning algorithms[C]// International Joint Conference on Neural Networks (IJCNN), IEEE.2015: 1–8.
[8] KAEMPCHEN N, FRANKE U, OTT R. Stereo Vision Based Pose Estimation of Parking Lots Using 3D Vehicle Models[C]// Intelligent Vehicle Symposium, IEEE.2002: 459–464.
[9] JUNG H G, KIM D S, YOON P J, et al. Light Stripe Projection Based Parking Space Detection for Intelligent Parking Assist System[C]// Intelligent Vehicles Symposium, IEEE.2007: 962– 968.
[10] SUHR J K, JUNG H G, BAE K, et al. Automatic Free Parking Space Detection by Using Motion Stereo-based 3D Reconstruction[J]. Machine Vision & Applications, 2010, 21(2): 163–176.
[11] JIANG S, NING J, CAI C, et al. Robust Struck tracker via color Haar-like feature and selective updating[J]. Signal, Image and Video Processing, 2017, 11(6): 1073–1080.
[12] 张乾.基于随机森林的视觉数据分类关键技术研究[D].广州:华南理工大学,2016.
[13] De ALMEIDA P R L, OLIVEIRA L S, BRITTO Jr A S, et al. PKLot–A robust dataset for parking lot classification[J]. Expert Systems with Applications, 2015, 42(11): 4937–4949.
[14] AMATO G, CARRARA F, FALCHI F, et al. Deep learning for decentralized parking lot occupancy detection[J]. Expert Systems with Applications, 2017, 72: 327–334.
[15] VIJAY P, HASAN F, JOHAN H, et al. Smart parking sensors, technologies and applications for open parking lots: a review[J]. IET Intelligent Transport Systems. 2018, 22(8): 735–741.
Experimental design of parking space detection in outdoor parking lot based on computer vision
ZHANG Qian1,2, XIAO Yongfei1,3, YANG Yucheng1,3, YU Jianghao2,3, WANG Lin3
(1. School of Data Science and Information Engineering, Guizhou Minzu University, Guiyang 550025, China; 2. Academic Affairs Office, Guizhou Minzu University, Guiyang 550025, China; 3. Key Laboratory of Pattern Recognition and Intelligent Systems of Guizhou Province, Guiyang 550025, China)
In order to facilitate the driver to find the available empty parking space in the outdoor parking lot, based on the computer vision of data acquisition, image processing and target detection, an outdoor parking space detection experiment is developed. In this experiment, Haar-like feature description and color energy change in parking space are used as data input of discriminant model, and random forest is selected as discriminant model of parking available state. Through the experiments on the international open data set PKLot, the detection accuracy of available parking spaces is more than 91%, and the experiments on the built GZMU-LOT show that the detection accuracy of available parking spaces is 92.21%.
parking space detection; computer vision; experimental design; outdoor parking lot
TP391.41
A
1002-4956(2019)07-0138-03
10.16791/j.cnki.sjg.2019.07.033
2019-01-13
国家自然科学基金项目(61802082,61263034,61762020);贵州省科技厅计划基金项目(黔科合J字[2014]2094号);贵州省教育厅创新群体重大研究项目(黔教合KY字[2018]018);贵州省教育厅自然科学基金项目(黔教合KY字[2017]129);教育部产学合作协同育人项目(201702044007);贵州省科技厅联合基金项目“基于计算机视觉的停车场智能收费系统研究”(黔科合J字[2014]7390)
张乾(1984—),男(苗族),贵州贵定,博士,副教授,主要研究方向为图像处理、模式识别和机器学习.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28 08:23:02
汽车画刊(2020年5期)2020-10-20 05:37:35
祝您健康·文摘版(2020年3期)2020-04-09 04:47:27
电子制作(2018年9期)2018-08-04 03:31:18
现代家长(2018年11期)2018-01-05 11:22:22
自动化学报(2017年4期)2017-06-15 20:28:54
电子制作(2016年15期)2017-01-15 13:39:21
国防科技大学学报(2016年6期)2017-01-07 06:44:55
少年博览·初中版(2016年11期)2016-11-30 05:02:05
中国石油石化(2015年17期)2015-06-01 12:21:42
