基于复合型双PWM在BLDCM控制中的仿真分析
2019-10-08 03:21:56张兴亮孟光伟张兵锋彭见仁
船电技术 2019年9期
张兴亮,孟光伟,张兵锋,彭见仁
基于复合型双PWM在BLDCM控制中的仿真分析
张兴亮,孟光伟,张兵锋,彭见仁
(海军工程大学电气工程学院,武汉 430033)
本文分析了BLDCM及复合型PWM整流器的基本原理,将复合型PWM整流器与BLDCM相结合构成双PWM控制系统,以减小谐波电流对电网的影响。建立了相应的数学模型,采用转速电流双闭环控制策略,通过Simulink搭建仿真模型进行仿真分析,验证了分析的正确性。
无刷直流电机 转速控制 双PWM
0 引言
传统三相电压型PWM整流器有诸多优点,正常工作时,能使输入功率因数为1、电流波形趋近于正弦波、输出直流电压电压可控[1]。但传统的电压型PWM 整流器为升压型变换器,运行在单位功率因数下,其直流输出电压高于交流电源电压的峰值[2]。Ching -Tsai Pan 等学者提出的三相电压型PWM 整流器与Cuk 电路相结合的复合型PWM整流器[3,4]不仅具备上述传统PWM整流器的优点,而且能拓宽输出直流电压的调压范围。永磁无刷直流电机(BLDCM)由于既有直流电机的运行效率高、无励磁损耗、调速性能好等优点,又有交流电机的结构简单、运行可靠、维护方便等优点,因此得到了广泛应用。本文采用复合型PWM整流器与无刷直流电机相级联的方式组成双PWM控制系统,整流侧实现对直流母线电压进行大范围调压以控制电机转速的,逆变侧的开关管仅根据电机的霍尔传感器的霍尔信号进行换相,以减小BLDCM因换相引起的谐波电流对电网的影响。而在传统电压型PWM整流器的各种控制方法中,电压电流双闭环控制最为普遍,而本文将采用转速电流双闭环控制策略来对系统进行控制,并通过Matlab/Simulink进行仿真研究。
1 主电路拓扑结构及原理分析
复合型双PWM系统是由复合型PWM整流器与无刷直流电机相结合得到的,所以下面先对复合型PWM整流电路和无刷直流电机的工作原理作简要介绍。
1.1 复合型PWM整流电路的基本原理
复合型PWM是由我国台湾地区的Ching-Tsai Pan等学者提出的一种基于三相电压型PWM整流电路与Cuk电路整合的拓扑结构,其开关等效电路如图1所示,是S1~S6分别为6个等效开关,1和1为交流侧等效电阻和电感。

图1 复合型PWM整流器结构示意图
复合型PWM整流器在一个周期内可分为直通时间和非直通时间[5],其工作过程如下:
设d为直通矢量的占空比,在直通期间dT内,三个桥臂至少有一处于直通状态,电容1经开关管向负载,电感2,电容0放电。
在非直通期间(1-0)内,桥臂上的6个开关按照传统升压型PWM型整流器进行工作,二极管正向导通,整流器经二极管向电容1充电,同时,i也经二极管续流而向负载供电。
1.2 永磁无刷直流电机基本原理
永磁无刷直流电机与一般的直流电机相比有很多相似点,但是无刷直流电机没有电刷的换相器,通过位置传感器的信号进行电子换相,减小了电机的制造和维护成本,提高了电机的使用寿命。无刷直流电机由逆变装置、电机本体和控制装置组成,电机本体包括定子、转子两部分部分组成。
无刷电机正常工作时,转子的位置信号通过位置传感器给控制电路用以产生6个开关管的驱动信号,从而使逆变装置在定子上产生旋转磁场,这样使转子转动起来。根据其换相方式可分为两两导通型和三三导通型。本文采用的时两两导通型换相方式,在此种换相中,每一时刻只有两个开关同时导通,一共有6中状态,每次仅改变一个开关管的导通状态,每个开关管间隔60°改变一次状态,每个开关管在一个周期内持续导通120°。
当无刷直流电机正转时,霍尔信号与定子电流以及开关管状态关系如图2所示,在0-60时,A、B、C三个霍尔信号的值为101,A相的定子电流为正,B相的定子电流为负,得到开关管VT3、VT5导通;在60-120时A、B、C三个霍尔信号值为100时,A相的定子电流为正,C相的定子电流为负,得到开关管VT3、VT4导通;在120-180时,A、B、C三相霍尔信号输出值为110时,则B相的定子电流为正,C相的定子电流为负,得到开关管VT2、VT4导通;在180-240时,A、B、C三相霍尔信号输出值为010时,则B相的定子电流为正,A相的定子电流为负,开关管VT2、VT6导通;在240-300时,A、B、C三相霍尔信号输出值为011时,则C相的定子电流为正,A相的定子电流为负,开关管VT1、VT6导通;在300-360时,A、B、C三相霍尔信号输出值为001时,则C相的定子电流为正,B相的定子电流为负,开关管VT1、VT5导通。
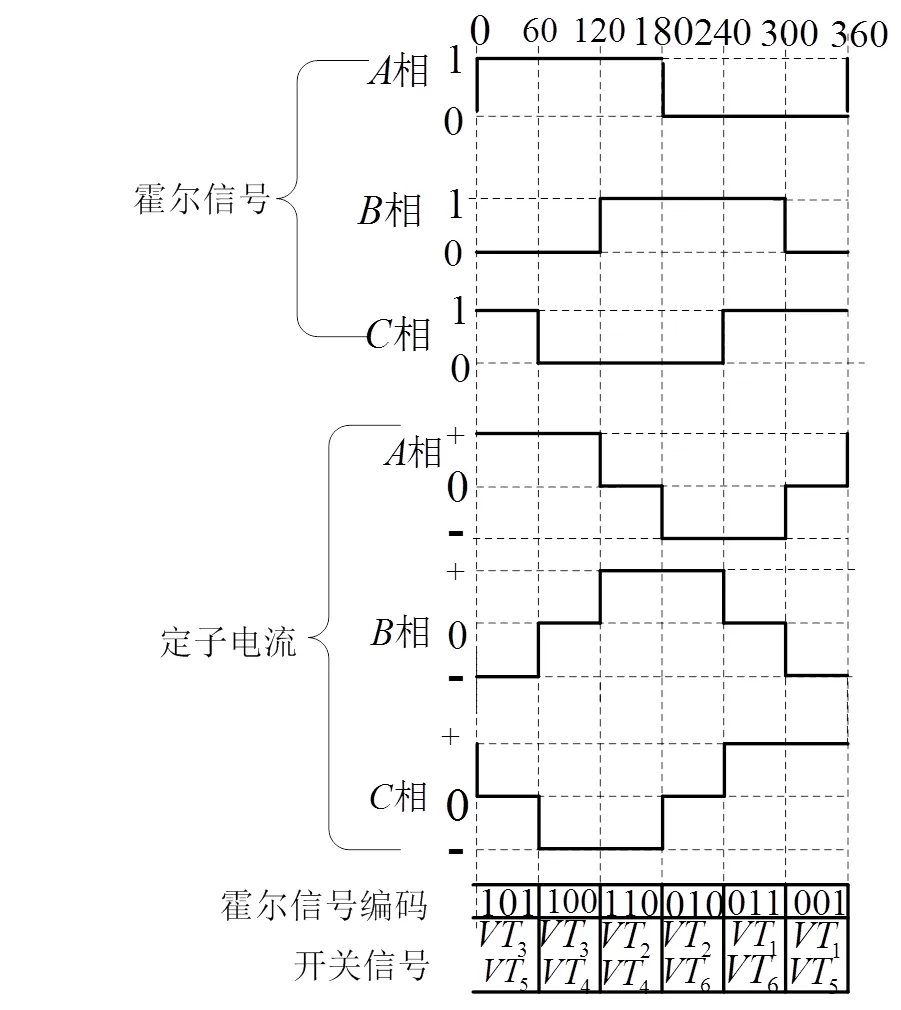
图2 无刷直流电机换相信号图
由此分析,使无刷直流电机完成换相过程,可以通过采集霍尔传感器的输出信号,再对采集到的霍尔信号进行相应的逻辑运算,最后产生开关管的驱动信号。
1.3 复合型双PWM系统的基本原理
将复合型PWM整流器与无刷直流电机相联,组成复合型双PWM系统,其结构示意图如图3所示。复合型PWM整流器可对直流母线电压进行宽范围调节,进而对无刷电机的转速进行调节。而逆变装置仅根据转子的位置信号进行电子换相,这样就构成了无刷直流电机的最简单的控制方式。

图3 复合型双PWM系统结构示意图
2 控制系统的设计
2.1 零矢量拓展

表1 拓展零矢量列表
在本系统中,逆变侧只根据霍尔信号进行换相,因此本系统的控制主要集中在整流侧。由于复合型PWM整流器的上下桥臂可以直通,因此SVPWM调制方式中的零矢量有由两个拓展到21个[4]。
根据复合型PWM整流器原理可知,在其正常工作时存在上下桥臂同时导通的时间0,理论上可以用表1中B、C、D中任何一个直通零矢量代替传统SVPWM中的零矢量。为了控制方便,本文采用V77代替传统SVPWM中的V07和V70。
2.2 控制策略的选取
本系统采用转速外环和电流内环的双闭环控制系统。控制结构如图4所示,通过采集网侧电流值a、b、c和电压值a、b、c,电机的转速,分别将a、b、c、a、b、c从三相静止坐标系转换到与电网基波同频率的旋转坐标下i、q和d、q。其中轴分量表示用功分量,轴分量表示无功分量。转速环作为外环,电机转速的给定值*和反馈得到误差,经过控制器进行响应的计算,得到输出有功电流给定i,电流环作为内环,为了使输入功率因数为1,必须使无功电流为零,因此无功电流给定i为零。i、i和i、i得到的误差分别经过各自的控制器以及前馈解耦控制后,进行相应的计算,得SVPWM控制策略算法,经SVPWM调制后输出6路脉冲驱动信号,控制PWM整流器中的开关器件。

图4 系统双闭环控制结构图
3 系统的仿真分析
根据前文所确定的控制策略,采用Matlab/simulink搭建仿真模型,系统主要由整流部分、逆变部分和无刷直流电机组成,系统参数按照表2设置,给定不同的转速值,观察BLDCM的转速、转矩及直流母线电流的脉动和交流侧功率因数、电流谐波等参数。
当转速给定值取*=800 r/min时,仿真时间设为4秒,运行仿真模型,得到交流侧电压电流波形、交流侧电流FFT分析及直流母线电流的FFT分析图形如图5、图6、图7所示。为了便于观察,测量时将交流侧电流放大15倍。
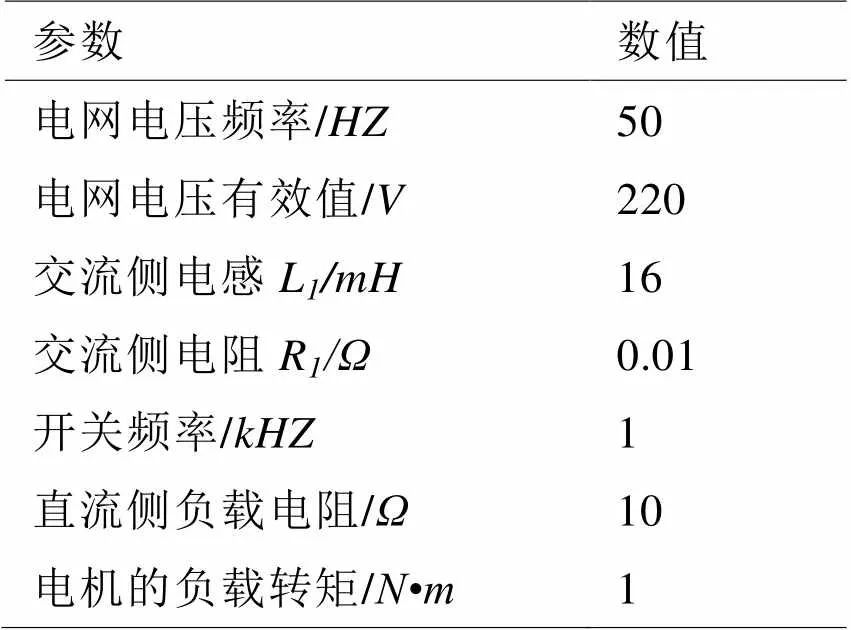
表2 仿真参数
从图5中可以看出,电机工作在转速每分钟800转时,交流侧电压电流同相位。可以实现单位功率因数运行,从图6、图7可以看出系统工作时,由于无刷直流电机换相引起电流脉动,导致直流母线电压上的谐波比较大。而经过复合型PWM整流器的作用,在网侧电流谐波可以达到很小,满足谐波要求。实现了谐波抑制的目的。
将转速给定值设为*=2500 r/min,重复上面的实验过程,同样可得,电机工作在转速每分钟2500转时,也能满足交流侧电压电流同相位。可以实现单位功率因数运行,且直流母线电压上的谐波比较大。而经过复合型PWM整流器的作用,在网侧电流谐波可以达到很小,满足谐波要求。实现了谐波抑制的目的。

图5 交流侧电压电流波形
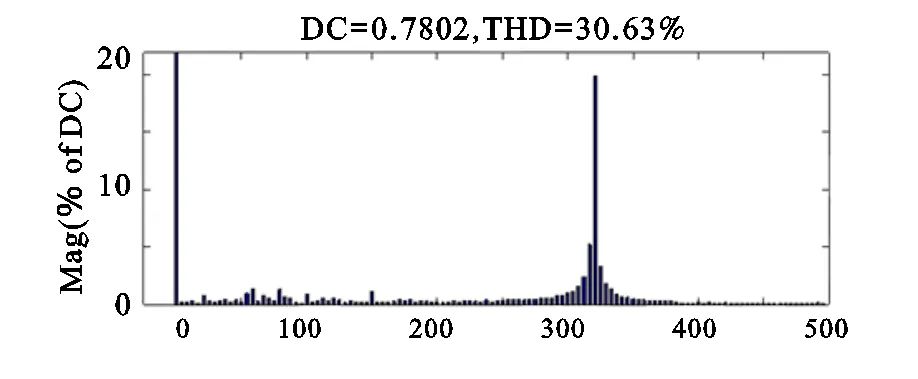
图6 直流母线电流FFT分析
4 结论
本文分析了复合型PWM整流器及永磁无刷电机的基本原理,并将其结合起来组成双PWM控制系统,通过分析和仿真验证,本系统能够实现电机的大范围调速,且能减小电机的谐波电流对电网的影响,具有良好的工程应用价值。也为下一步具体实验打下理论基础。

图7 网侧电流FFT分析
[1] Singh B, Singh B N, Chandra A, et a1. A review of three-phase improved power quality AC-DC converters[J]. IEEE Transaction on Industrial ElectroniCS, 2004, 51(3): 641-660.
[2] 张崇巍, 张兴. PWM整流器及其控制[M]. 北京: 机械工业出版社, 2012.
[3] 2005. C. T. Pan and J. J. Shieh. A single stagethree-phase boost buck AC/DC converter based on generalized zero voltage space vectors[J]. IEEETrans Power Electron, 1999, 14(3): 949-958.
[4] Ching-Tsai Pan, Jenn-Jong Shieh. New Space-Vector Control Strategies for Three-Phase Step-Up/Down AC/DC Converter[J]. IEEE Transactions on Industrial Electronics, 2000, 47(1): 25-34.
[5] 曾博, 孟光伟, 宋亚伟, 方伟. 三相升-降压PWM整流器的仿真研究[J]. 船电技术, 2016, 36(10): 61-64.
BLDCM Control Based on Compound Double PWM Simulation Analysis
Zhang Xingliang, Meng Guangwei, Zhang Bingfeng
(College of Electrical Engineering Naval Univ.of Engineering, Wuhan 430033, China)
TM33
A
1003-4862(2019)09-0061-04
2019-02-28
张兴亮(1989-),男,硕士研究生。研究方向:电力电子与电力拖动。E-mail: 763606741@qq.com
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
莆田学院学报(2021年5期)2021-11-13 06:36:38
科学家(2021年24期)2021-04-25 17:55:12
甘肃科技(2020年20期)2020-04-13 00:30:22
电子制作(2017年1期)2017-05-17 03:54:12
电测与仪表(2016年1期)2016-04-12 00:35:12
通信电源技术(2016年4期)2016-04-04 02:57:16
电源技术(2015年1期)2015-08-22 11:16:26
电测与仪表(2015年12期)2015-04-09 11:44:44
淮南师范学院学报(2015年3期)2015-03-22 01:16:17