基于单片机的伺服电机控制系统
2019-10-08 05:49:08张靖辉
电子技术与软件工程 2019年15期
文/张靖辉
当自动化控制系统运行时,交流伺服电机的主要功能是把电压控制信号转变为机械位移,然后将接收到的电压信号转变为电机的一定转速或者是角位移,所以可利用单片机来对伺服电机的进行控制。交流伺服电机的优点较多,其灵巧轻便、体积小,容易控制,因此,交流伺服电机受到人们的喜爱,广泛应用在控制系统之中。
1 单片机、伺服电机概述
单片机是一种集成电路芯片,又叫做微型控制器,单片机是将中央处理器、定时器、各类接口都集成在一块集成电路芯片上的微型计算机。简单来说,单片机就相当于一个小型电脑,体积虽小,但是与计算机并无大的差别。单片机的价格低廉,因此将单片机作为小型家电的控制器具有非常高的性价比。单片机的运行是依靠程序进行的,这种程序可人进行修改。单片机与电脑中常用的微型处理器相比构造简单、更具灵活性、体积较小、便于存放、使用方便,并且能耗很低,可在各种恶劣的环境下正常运行,适应环境能力很强。近年来,随着我国信息技术与高科技的飞速发展,单片机各方面也得到扩展和进步,被家用电器、电子产品、机械产品等广泛应用。
伺服电机是一种控制零部件运转的发动机,是变速装置的一种。伺服电机可以控制发动机的转速,较为精准,利用电压信号进行控制。伺服电机的转速与输入信号密切相关。伺服电机主要分为两大类,即交流电机以及直流电机。伺服一般情况下都是通过脉冲定位,当伺服电机收到一个脉冲后,就会相对应的转动一个脉冲的角度,从而实现位置的变化,伺服电机本身能够发出脉冲,因此,伺服电机每发生一次位移,都会发出和位移角度相对应的脉冲,这样电机接收和发出的脉冲形成闭环。
2 总设计方案

图1:控制系统组成
在本次研究之中,所选用的是松下交流伺服电机,根据单片机的工作原理来实现对松下伺服交流电机的控制。通过键盘输入详细的转速参数,单片机在收到具体的转数参数之后,将信号转变为脉冲信号,差动驱动器把脉冲信号转换为差动脉冲信号后传输给伺服电机驱动器;驱动器依据接收的脉冲信号对交流伺服电机进行控制;然后驱动器在收到编码器反馈的信号之后,再将反馈的数据和目标数值进行系统对比,之后再对电机转动的角度机型进行调整,进而实现单片及对交流伺服电机的有效控制。为了提升CCD成像的精准度,特别选择20位的增量式光电编码器。控制系统组成如图1所示。
3 硬件设计
在本次研究中,在实现对伺服交流电机控制的过程中,选择的是STC12C5A60S2型号的单片机作为系统处理器,与此同时,将单片机设定为1T模式,这样设定可以使其高速运算,整体更为简便、效率更好。片上集成1280字节RAM,60K flash程序存储器以及EEPRΟM。在本次研究中,选用的交流伺服电机型号为松下MSMD5AZG1U,它的额定输出功率时50W,编码器为20位的增量式光电编码器。所选择的驱动器与单片机均为松下品牌。
在本次研究中,单片机主要通过以下三种方式对交流伺服电机进行控制:
(1)对交流伺服电机的位置进行控制,
(2)对交流伺服电机的转速进行控制,
(3)对交流伺服电机的转矩进行控制。在对交流伺服电机的位置进行控制时,驱动器在收到位置控制指令后,通过电子齿轮分倍频,和驱动器接收的反馈信号产生信号偏差,之后形成变速信号,位置偏差与转速信号经调解后,形成转矩电流,从而达到控制交流伺服电机的目的。伺服电机的编码器种类也是多种多样的,主要涉及到的有增量式光电编码器以及绝对式光电编码器。在本次研究中,我们所选用的交流伺服电机,其内置编码器为20位的增量式光电编码器,这种编码应用范围比较广泛,编码器的结构建议,容易使人了解,使用时间较长不易损坏,分辨率高。
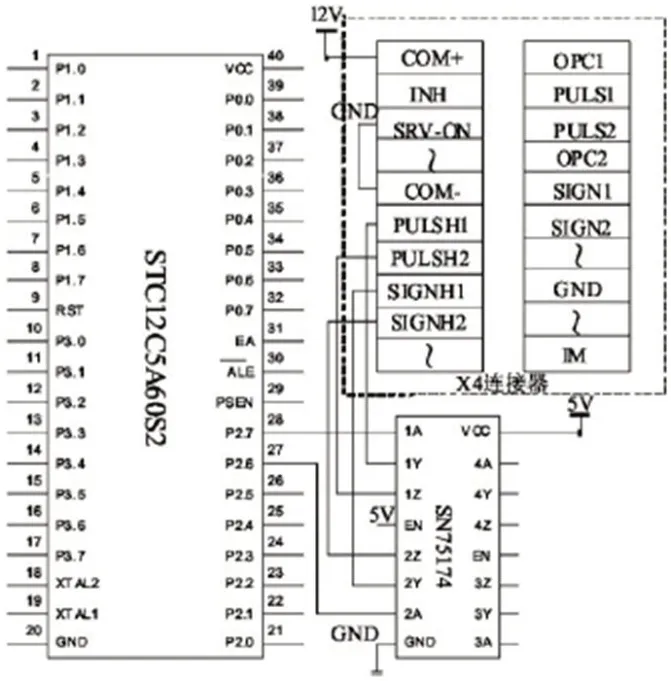
图2:单片机与差动驱动器和连接器接口电路图
3.1 单片机控制器硬件
单片机控制系统的核心零件选用STC12C5A60S2,控制器的硬件应与外部电路相匹配,从而实现对伺服交流电机的控制。单片机的独立键盘输入口为P3口,液晶模块控制端口为P0、P1.0、P1.1、P1.2,脉冲信号发送口为P2.6和P2.7。
3.2 差分驱动器与伺服电机驱动器硬件
本次所用的单片机Ι/Ο口输出开关量可控制信号电平并无直接驱动外围设备,需要在信号输入控制端需要增设相关的驱动电路。伺服驱动器连接器的控制信号输入模式采用差动模式,所有采用SN75174差动驱动器。单片机+差动驱动器+连接器接口电路见图2。
4 软件设计
在设计其软件时,主要有三个关注点:
(1)零点定位;
(2)对交流伺服电机均速运行控制;
(3)对交流伺服电机加速以及减速的控制。
软件设计主要包含几大部分,主程序、中止服务程序以及控制交流伺服电机运行速度的程序。系统面板包括按键有8个,包括开始暂停、零点标定,以及6个转速设置按键。
4.1 零点定位
系统零点定位判断原点的决定条件是编码器Z脉冲信号E2与原点近位信号ΟRG。E2信号为编码器Z脉冲,一般情况下电机转动360°后就会产生1个Z脉冲,即电机每转动一圈编码器就对应产生1个Z脉冲。
4.2 转速控制
伺服电机的转速控制是依靠定时器来实现的,因此对定时装置时间常熟的确定是整个系统的一个重要内容,现将时间常数的计算情况进行讨论:
电机转速取值n是由脉冲频率、转子齿数和拍数所决定的,脉冲频率与角速度之间存在正相关关系。驱动器电子齿轮比为1000,编码器分辨率设为F,定时时间设为T,则T=电机转速×分辨率÷(60×电子齿轮比)=n×F÷(60×1000);单片机一个机器周期设为Tc,晶振为fl(11.0592MHz),默认的单片机模式为LT模式,所以一个时钟周期Tc为本次所采用的定时器模式为1,定时时间为1,定时器装入初始值N,则Tc=定时器定时初值设定公式为T=(65536-N)×Tc。
4.3 升降频率控制
通常步进电机常用的升降频率控制有直线型、S型和指数型升速方式,本次系统采用直线型升速方式。
5 结果及结论
通过对系统软件程序的编程、调试,控制相关的参数,对交流伺服电机进行控制。通过多次实验、比对,单片机对交流伺服电机的控制情况良好,控制系统电机转速0~10000r/min内运转,定位精度0.1°;不仅如此,本次所选用的硬件里,电路比较简易,程序简单,系统的独立运行能力较强,定位准确,转台平稳转动,成像像质较好。由以上论述可知,将单片机作为控制器,对交流伺服电机进行控制,使系统性能得到最大限度的发挥,进而有利于低系统的运行成本,提高经济效益。
猜你喜欢
微特电机(2020年11期)2020-12-30 19:42:32
电脑爱好者(2020年6期)2020-05-26 09:27:33
电子制作(2018年17期)2018-09-28 01:57:00
通信电源技术(2018年3期)2018-06-26 06:33:36
电子制作(2017年10期)2017-04-18 07:23:16
电子制作(2017年23期)2017-02-02 07:17:24
光学精密工程(2016年5期)2016-11-07 09:06:04
工业设计(2016年6期)2016-04-17 06:42:53
电测与仪表(2015年24期)2015-04-09 12:04:48
上海电机学院学报(2015年3期)2015-02-28 14:29:52