一种快速构建点云坐标系的方法
2019-10-08 05:48:54李宇洁卿都
电子技术与软件工程 2019年15期
文/李宇洁 卿都
由于获取点云数据的传感器的快速发展,点云数据变得越来越多,而且也越来越容易获取。点云是物体在三维空间中的一种表达方式[1],这些点与二维图像中的平面像素点不同,是空间中的立体像素点,因此这些点是离散的、独立的。如今,在计算机可视化中,点云三维模型已经越来越受到人们的欢迎,并逐渐成为视觉、机器人、医学、遥感、虚拟现实和增强现实[2]等领域的核心工具。如机器人需要进行物体抓取时,需要首先获取物体在某个坐标系中位置与姿态,因此构建物体的自身坐标系是非常重要的。构建物体的自身坐标系最简单的方法就是手动标注,根据物体的形状确定物体坐标系的原点,以及X、Y、Z轴的方向。文献[3]中使用统一机器人描述格式(URDF)方法,以世界坐标系为基坐标系,给出旋转向量和平移向量确定物体自身的坐标系。文献[4]使用一种海明码的格子图作为视觉标志,把这个标志贴在物体上,然后使用摄像头检测视觉标志的位置,通过Levenberg-Marquardt算法[5]求得贴在物体上的标志在相机坐标系中的位姿,并且可在物体表面构建一个坐标系。
前面介绍的方法需要人为参与,或者需要辅助标志,不能快速、稳定地构建物体自身的坐标系。本文提出了使用物体点云的三维模型,求得点云的形心坐标、以及三个主成分方向,从而确定物体的坐标系。
1 三维空间主成分分析
通过实验观察发现,三维点云在空间中的整体分布具有一定的规律,一个物体的三维点云整体上能表现出这个物体的外形和轮廓,因此这些点云在X轴、Y轴、Z轴上具有一定的相关性。借鉴PCA(Principal Component Analysis)[6]主成分分析的思想,求取数据分布的主成分方向,并且每一个主成分之间是相互垂直的。PCA能实现从原始的空间中顺序地找一组相互正交的坐标轴,新的坐标轴的选择与数据本身是密切相关的。其中,第一个坐标轴是数据分布中方差最大的方向,第二个坐标轴是与第一个坐标轴垂直且在该方向上的方差最大,第三个轴与第一、第二个轴组成的平面相互垂直,并且第三个轴所指的方向是方差最大的方向。三维空间主成分分析示意图,如图1所示,u、v、w分别是在方差从大到小的方向向量。
2 坐标系构建方法
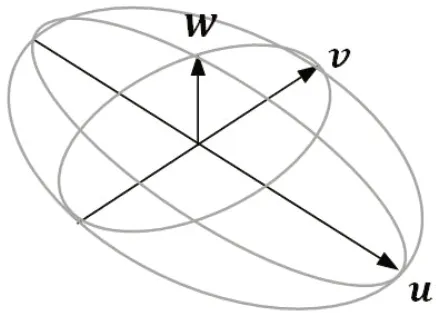
图1:三维空间主成分分析示意图
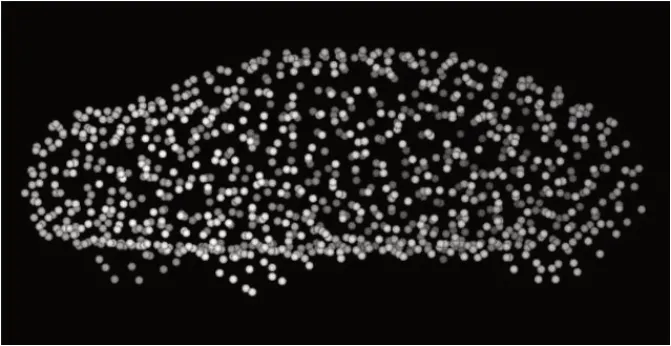
图2:小车点云图

图3:小车坐标系
点云是物体在三维空间表现的一种方法,这些点不再是二维图像中的平面像素点,而是空间中的立体像素点,因此这些点是离散的、独立的,如图2所示是一辆玩具小车的点云图。为了便于描述点云物体相对于世界坐标系的位姿,故需要求得该物体的三维几何中心,即物体的形心,以及描述物体姿态的坐标系。
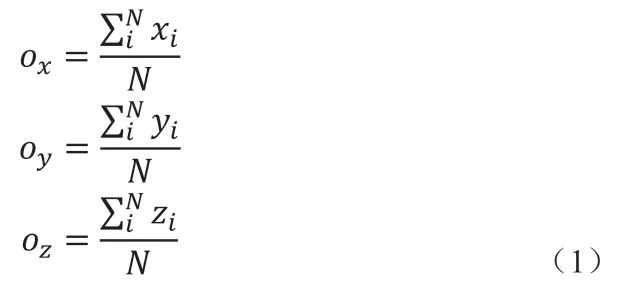
已知点云集合中有N个点,k为某个点云X= (X,Y,Z)T∈R3的邻域中包含点的个数,k∈N,k个点云代表一个物体的点云集合。pi=(xi,yi,zi),pi∈N,点云的形心坐标o=(o0,oy,oz,)。形心坐标o可由(1)式求得。
为了能够描述点云X的局部三维结构,需要求出k个点在X,Y,Z坐标值的协方差,如式(2)所示,可求得cov(X,X),cov(X,Y),cov(X,Z),cov(Y,Y),cov(Y,Z),cov(Z,Z),其 中cov(Y,Z)= cov(Z,Y)。

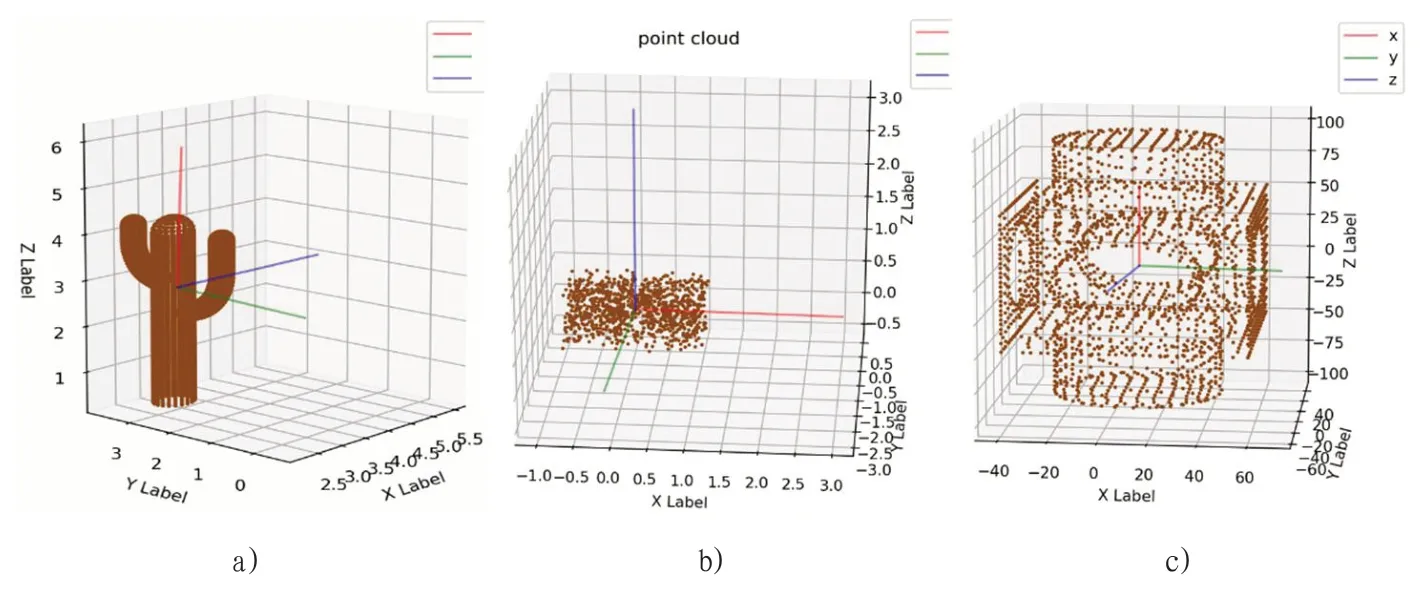
图4:点云物体坐标系
然后得到一个协方差矩阵S∈R3×3,如式(3)所示。
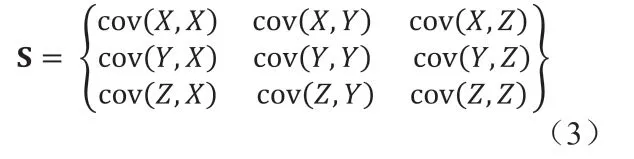
因为式(3)是一个对称正定矩阵,故由对称正定矩阵的性质得到该矩阵的三个特征值都是大于零的,即λ1≥λ2≥λ3≥0,对应的特征向量为V1、V2、V3。由式(1)可以求得点云的形心坐标o=(ox,oy,oz,),点o作为表达物体自身坐标系的原点,特征向量为V1、V2、V3分别是物体自身坐标系的方向向量,由此可确定物体自身坐标系的原点以及坐标轴方向。如图3所示是图2中小车点云根据以上方法求得的坐标系。
3 实验结果
通过本文提出的点云坐标系构建方法,可以求得点云物体的形心坐标,以及坐标系中坐标轴的方向,如图4所示。红绿蓝分别表示X、Y、Z三个坐标轴,图4a)为仙人掌形状的物体,竖直方向为X轴。图4b)是一个立方体的点云物体,每一个坐标轴都垂直某一个物体表面的切平面。图4c)是一个空心的点云物体,求得的坐标系能很好的反应该物体的姿态。
4 结论
为了快速、稳定地构建物体自身的坐标系,本文提出了利用主成分分析方法确定坐标轴方向的方法。根据实验可知,同一个物体不管在任何时候或则任何姿态,求得的坐标系都是相对不变的,能够很稳定地反应物体在世界坐标系中的姿态情况。该方法实现的算法运行速度与物体点云个数是线性关系,即时间复杂度为Ο(n)。
该方法还有需要改进的地方,如需要前期获得物体的点云形式,当点云数量过大就会影响算法的运算速度。解决点云数量大的方法就是对点云进行下采样,减少点云数量,从而加快运算速度。
猜你喜欢
数理化解题研究(2021年34期)2021-12-26 08:32:02
阅读(科学探秘)(2018年4期)2018-05-14 10:06:27
电脑知识与技术(2018年35期)2018-02-27 13:29:44
自动化学报(2017年11期)2017-04-04 02:52:44
中学生数理化·高二版(2016年7期)2016-05-14 13:19:34
学生天地(2016年33期)2016-04-16 05:16:26
四川师范大学学报(自然科学版)(2015年1期)2015-02-28 14:07:23
电视技术(2014年11期)2014-12-02 02:43:28
新一代(2011年2期)2011-06-17 09:29:50
河北医科大学学报(2010年12期)2010-03-25 10:15:20