
室内导购机器人环境地图构建与路径规划系统设计*
2019-09-26 02:36:54何倩倩张荣芬刘宇红王曼曼
传感器与微系统 2019年10期
何倩倩, 张荣芬, 刘宇红, 杨 宇, 彭 燕, 王曼曼
(贵州大学 大数据与信息工程学院,贵州 贵阳 550025)
0 引 言
随着现代化商场规模日益扩大,人们在面对大型商场中各品牌店铺数量增多、地形复杂且易迷路等问题时,人们很难快速地从各大商场中找到自己喜欢或欲到达的店铺。目前,在导航方面,全球定位系统(GPS)定位导航室外精度为几米,然而在室内GPS却无法进行定位。传统室内导航的方法运用黑线检测导航、二维码导航等技术,这些技术在改变和扩充路径时都较麻烦且需要在地面铺设引导线,这在实际场景中在实现与用户体验上都有很大的局限。
为此,学者们对相关技术展开了大量研究,伍洲等人[1]设计了上位机与DSP下位机的学习型智能规划路径机器人系统,黄超等人[2]采用射频技术(RFID)进行定位,地磁感应电子罗盘相结合进行导航;Turk等人[3]对跟踪特定地面的自主导航问题,采用彩色摄像机和激光测距仪完成通过路面跟踪进行车辆自主导航。这些方法及系统对于实际操作、用户体验等方面都还有所欠缺。
本文设计了一种室内导购机器人自主导航系统。本系统采用优化的A*算法进行路径规划后导航。实验表明系统能在突然有人出现时,能很好地避障且在较为复杂的室内环境中具有很好的实时性与鲁棒性。
1 室内导购机器人系统的总体设计
系统由前端室内导购机器人和后端大数据云平台组成。本系统采用树莓派作为主控芯片,搭载雷达模块、无线传输模块、语音模块、运动控制模块等功能模块完成对购物者引导至指定店铺或推荐店铺的功能。前端室内导购机器人实现语音交互、构建地图、路径规划避障、智能导航等功能;后端在大数据云平台上实现店铺推荐功能。本系统的核心功能为:将语音识别所得推荐店铺名或大数据云平台处理所得推荐店铺名与前端进行信息交互,从而引导购物者到达目的地。整体系统功能如图1所示。

图1 室内导购机器人功能框图
本文主要完成导航系统中室内导购机器人地图构建、路径规划、自主导航部分设计。室内导购机器人自主导航采用安装Linux系统并配置ROS的树莓派作为主控单元,采用思岚v1激光雷达与惯性测量模组GY85对周围信息感知后构建商铺位置信息已知的二维栅格地图;运用基于STM32芯片及外围电路进行机器人的电机驱动。
2 室内导购机器人硬件系统设计
系统硬件设计包括安装Linux系统并配置ROS(机器人操作系统)的树莓派核心板和思岚v1激光雷达及惯性测量模组GY85模块。
2.1 主控单元模块
考虑到系统的实时性及成本的原因,采用树莓派核心板作为主控模块。在此模块上采用ROS进行开发,ROS采用分布式进程(即“节点”)框架进行设备控制[4],通过不同节点的进程接收、发布、聚合各种信息,对机器人的运动操作和对各个部分功能单元所采集到的数据和信息汇总分析后,对机器人发出相应的控制指令。
2.2 激光雷达模块
思岚v1激光雷达获取机器人周围的环境信息。此雷达拥有360°扫描测距、12 m半径的测量范围,在系统中此雷达模块用于感知机器人周围环境信息并与GY85提供的数据信息进行融合,为机器人的决策规划提供准确的环境信息和自身相对的位置信息,从而构建地图。
3 室内导购机器人自主导航算法
系统主要分为地图构建、路径规划等模块组成。软件设计主要以机器人前端作为服务端,大数据云平台和TX2(NVIDIA Jetson TX2)作为客户端进行交互。系统软件设计框图如图2所示。

图2 系统软件框图
软件部分主要分为三个部分,大数据云平台作为客户端2与用户交互得到目标店铺;客户端1与用户语音交互得到目标店铺;客户端1与客户端2设置标志位,确保机器人两种方式用户只能采取一种进行操作,并将最后的目标店铺作为请求发送到服务端进行操作。服务端对客户端发送的目标店铺进行文件写、读操作,并对目标店铺进行规划路径与导航,最终到达目的地。
3.1 先验地图构建
先验地图构建是机器人自主导航的基础,本文需构建一个商铺位置已知的地图。通过激光雷达与GY85采集到的信息融合感知周围环境信息,对信息进行处理后生成局部地图,同时开启地图服务,移动机器人将局部地图更新至全局地图中,控制机器人移动到每个商铺,将商铺位置与朝向在代码中定义,从而获得商铺在地图中的位置,如此循环,直至全局地图不再变化、所有商铺商铺位置信息已知时,所需地图构建完成。
3.2 A*全局路径规划算法的优化
3.2.1 A*算法原理
A*是一种启发式的路径搜索算法,从起始位置开始,有限扩展从当前位置距离目标最近的路径,一次扩展当前节点的8个方向的点[5,6]。该算法的基本原理如下:通过估价函数h(n)中包含的信息搜索目标所在方向算法路径的形成
f(n)=g(n)+h(n)
(1)
式中h(n)小于实际代价,f(n)为起点经过状态n到达终点的总代价,g(n)为路径规划的路径代价,h(n)为到达目标的预测距离[7,8]。f(n)决定最短路径,f(n)绝大部分取决于h(n),A*得到代价最小路径的前提是h(n)必须小于与目标的距离。如图3所示,从Start出发,当前到达Middle点,目标为Goal点,g(n)为到Middle的路径代价,h(n)为到达目标的预测距离,g(n)最小化能维持最小路径距离,h(n)最小化能持续聚焦于寻找目标,两者之和为找到的最佳搜索策略。

图3 A*算法原理示意
A*找出代价最小的路径的前提是所处环境为静态环境。但在实际场景中,通常为较复杂的动态环境,此时对路径规划的要求较高,对于已构建好的地图中出现新障碍物时,就对路径规划提出了较高要求。
3.2.2 A*算法的优化
为解决在机器人计算过程中对时间、空间要求较高的问题,本文在传统A*算法基础上加入逆向的A*算法遍历,将A*算法同时从起始点与目标点同时出发,实现从目标点往目标点正向搜索和目标点往起始点的反向搜索。
传统的A*算法创建2个表,open表也称开启列表,最初只有一个起始点,在后续节点扩展中会放入更多的节点,它是一个待检查值的集合,close表也称为关闭列表,列表中内容为存在已经检查过的值的集合。从起始点进行节点扩展,对该节点周围8个节点进行扩展,判断8个方向的节点在open中是否存在(可通过的点)或为不可通行的点,若为不可通行的点,则将此点遗弃不做扩展。取其他节点作为父节点进行拓展,直至close中出现目标节点。
优化的A*算法主要思想是将传统的仅从起始位置出发寻找最优路径逼近终点优化为从起点向终点逼近的同时从终点向起点也逼近,这样在一定条件下可以大大加快运行速度,提升系统的实时性。
该算法创建2个open列表,分别为open_a,open_b,3个close列表,分别为close_a,close_b,close_c。将起始点Start放入open_a,终点Goal放入open_b;open_a按照正向遍历将满足的节点放入close_a,open_b按照逆向遍历将满足的节点放入close_b,当close_a与close_b搜索到的节点为同一节点时,则从该节点出发分别向起点和终点回溯生成最优路径,并将此路径放入close_c,close_c为最优路径集合。优化的A*算法流程图如图4所示,close_c表中的路径即为最优路径,在理想情况下,采用此方式使算法的速度相比与传统算法将快1倍,保证了系统的实时性。
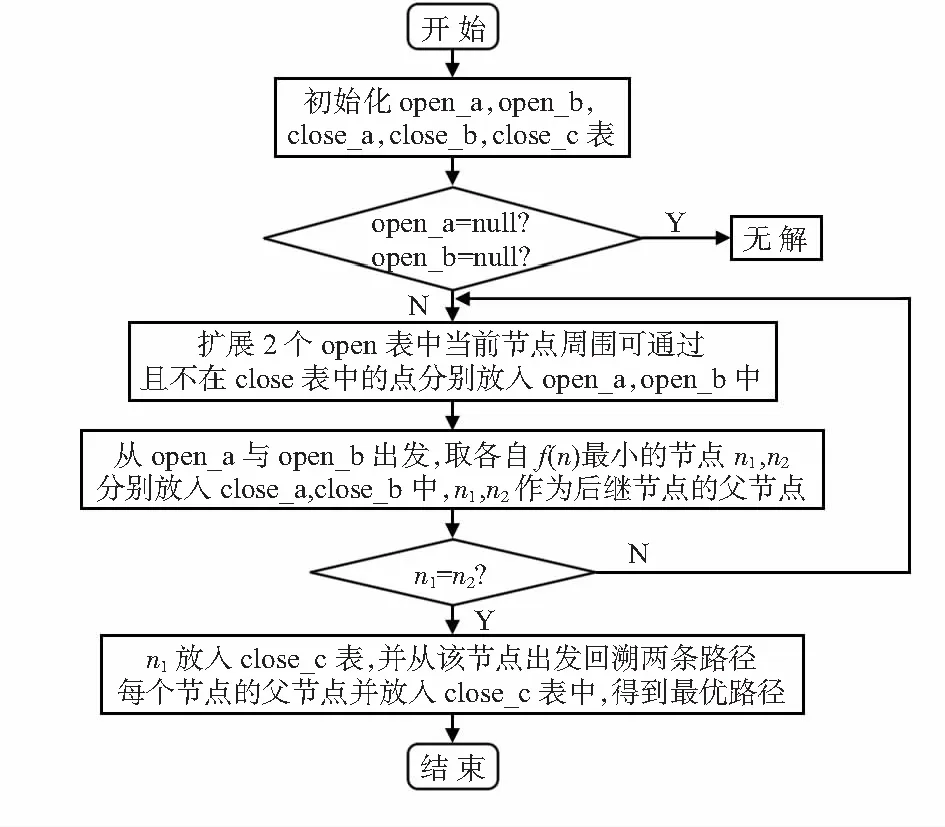
图4 A*算法优化的流程
优化前后的时间对比如表1所示。表中数据记录时间为从接收到指令开始处理到终点朝向店铺时记录的时间,不同的障碍物的复杂程度影响产生的效果也不一样。
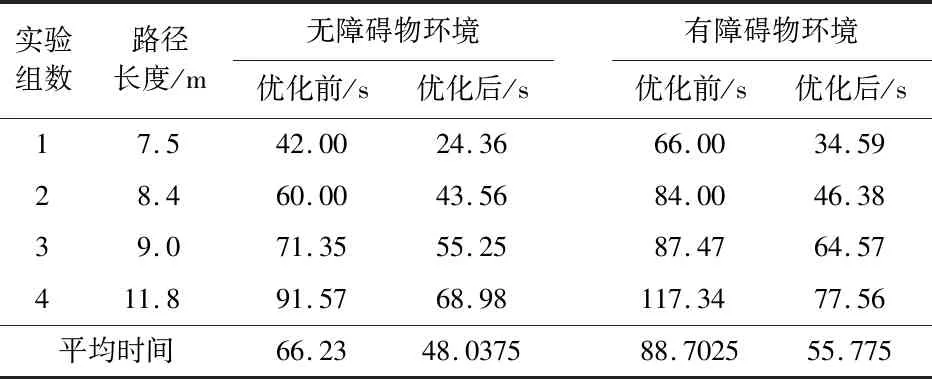
表1 算法优化对比
由表1可知,优化后的算法相比于优化前的算法,在无障碍环境下,平均时间提升了18 s左右,有障碍环境下,平均时间提升了32 s左右,保证了系统运行的实时性。
4 系统测试
本系统测试场景通过在实验室搭建模拟环境,实验室长约14 m,宽约8 m。实验室内部有很多实验桌模拟商场的店铺及其他障碍物(包括箱子、椅子等等)。
首先,将机器人放置至模拟商场的该机器人的起始位置(设为Start)进行建图,并将此位置作为模拟商场中机器人放置的起始位置,并设置好每个模拟店铺的对应的机器人的位姿,构建已知商铺位置的地图及部分对应视角如图5(a)所示。图5(b)为机器人在当前环境地图下的路径规划效果图,由图5(b)可知,路径规划会根据实际情况择优选择最短路径。
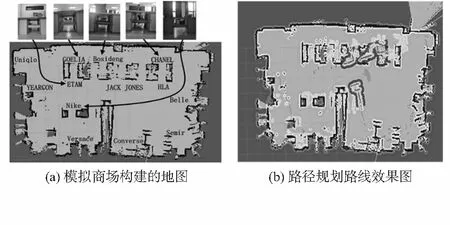
图5 模拟商场构建的地图及路径规划路线效果
用户通过与机器人语音交互或用扫描二维码进入大数据云服务器平台交互后获得目标店铺,机器人从起始位置出发至目标店铺采用优化后的A*算法规划全局路径,提高了系统的实时性,机器人在自主移动的过程中进行局部路径规划来进行避障。图6中先验地图路径规划可以避开先验地图中已存在的障碍物,在机器人遇到临时障碍物时,机器人根据临时障碍物调整路径,从而避开障碍物,提高了系统的鲁棒性。

图6 遇到临时障碍物时避障效果图
5 结束语
本文完成了室内导购机器人地图构建及路径规划及导航的软件及硬件设计。采用激光雷达及GY85模块获取机器人的环境及状态信息来进行建图,引入A*算法并进行一定优化后进行定位并更新机器人位姿进行导航,实现了购物者通过本系统快速找到自己欲到达的理想目标店铺。本系统在实体店中为广大的购物者提供了方便,解决由于目前工作压力大,网上购物无法确保质量而前往实体店购买时无法及时找到购物者欲到达的店铺的问题。
猜你喜欢
海外文摘·文学版(2022年4期)2022-04-14 21:55:16
文苑(2020年5期)2020-06-16 03:18:32
领导决策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中国卫生(2016年2期)2016-11-12 13:22:16
中国工程咨询(2016年4期)2016-02-14 07:28:28
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08
少儿科学周刊·儿童版(2015年4期)2015-06-17 03:37:19
