
基于六电极石英晶体谐振器的姿态检测转换结构设计*
2019-09-26 03:05:32田文杰陈福彬
传感器与微系统 2019年10期
佟 盟, 田文杰, 陈福彬, 冯 洁
(1.北京信息科技大学 传感器重点实验室,北京 100101;2.云南师范大学 物理与电子信息学院,云南 昆明 650500)
0 引 言
石英晶体谐振式传感器是压电谐振式传感器中的一种,因其具有输出频率稳定、重复性好、线性度好等优点,已被广泛应用于数字式惯性传感及姿态检测系统[2~5]。随着传感器集成化[6],当器件尺寸不断减小时,其内部的石英晶片设计难度也变得越来越大,可借助有限元分析及数值计算等方法提高器件研发的效率[7]。
根据石英晶体压电效应及各向异性的特点,本文基于Comsol Multiphysics仿真软件对石英晶片内部应力分布进行仿真,通过仿真结果得到电极在石英晶片上的位置分布。并选用2个几乎完全相同的六电极石英晶体谐振器通过粘接、焊接技术制作成水平姿态传感器转换结构。利用压电石英晶体谐振器的力—频敏感特性,通过检测转换结构在不同倾斜角度下谐振器受力时的谐振频率变化量,来检测载体的姿态变化。
1 工作原理
1.1 力—频效应
1966年,Ratajski J M[7]总结出石英晶体力—频特性的变化规律[8],即
(1)
式中 Δf为石英晶体谐振器谐振频率变化量;Kf为拉氏(Ratajski)系数;n为谐波次数;f为石英晶体谐振器的谐振频率;D为传递力F的截面宽度;对于结构一定的石英晶体谐振器D,n,Kf,f均为常值,所以,Δf与ΔF呈线性关系。
1.2 石英晶片内部应力分布
石英晶体是弹性介质,具有压电特性。石英晶体的压电特性可用四类压电方程进行描述。对于利用石英晶体压电特性的力敏谐振器,晶体一般工作于高频谐振状态,压电方程选应变S和外加电场E为自变量,应力T及电位移D为因变量。所以,石英晶体的压电方程为
(2)
式中c为弹性刚度常数,e为压电应力常数,ε为介电常数,et为e的转置矩阵。
对于长、宽、厚分别为a,b,d的薄圆片石英晶体(a,b≫d),在电场激励作用下,晶体谐振频率为
(3)
式中m,n为奇实数,c55,c66为弹性刚度常数分量,ρ为晶体密度。由式(3)知,晶体谐振频率主要由厚度、晶体密度及刚度常数分量决定。
对于薄圆形晶片,在直径方向施加径向力F作用时,晶体内P点的应力与F间的关系可用如图1所示的模型来描述。

图1 径向力作用下薄圆片石英晶体的应力模型
图1中,xoz为力作用坐标系,ox轴与力F共线;xoozo为晶体坐标系。对于AT切石英薄片,oxo轴为晶体的电轴,ψ为力作用方位角(即作用力方向与oxo轴的夹角)。在F的作用下,晶片内P点产生的两个分应力σ1,σ2为
(4)
式中λ,μ为由边界及力平衡条件决定的应力参数;α,β,γ,δ为由晶体弹性柔顺常数张量矩阵元素决定的材料常数(晶体弹性的各向异性就体现在这些材料参数上)。
1.3 压电谐振式水平姿态传感器转换结构工作原理
压电谐振式水平姿态传感器敏感结构及工作原理,如图2所示。
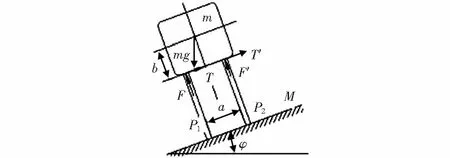
图2 六电极姿态传感器敏感结构及工作原理
图2中,将石英晶片P1,P2对称安装在质量为m的敏感质量块m和传感器基座M之间,a为两晶片的间距,b为质量块的重心到质量块底面的距离,gn为重力加速度,φ为传感器敏感结构处于工作状态时基座相对于水平面的倾斜角度。晶片P1,P2上的谐振器分别与各自的谐振电路组成振荡器产生谐振,振荡器产生的频率信号经差频处理和放大电路,再经补偿及输出电路处理后直接输出数字信号,如图3所示。

图3 姿态传感器工作原理
本文的姿态传感器工作原理:根据如图2所示,当基座M相对于水平面倾斜φ时,两石英晶片的受力分别为
(5)
(6)
由此可得,相对于水平位置,基座倾斜φ时晶片受力的改变量分别为
(7)
(8)
由式(1)、式(7)、式(8),得
(9)
(10)
两晶片上谐振器的差频为
Δf=Δf1-Δf2=Ksinφ
(11)
(12)
式中K为传感器的与结构和工作状态有关的常数,若φ较小,sinφ≈φ,则Δf=Kφ,由此可见石英晶体谐振器的频率变化量Δf与姿态倾斜角一一对应,即测量出两晶片上谐振器的差频值Δf就可得到姿态倾斜角度。
2 仿真分析
利用Comsol Multiphysics有限元分析软件,对直径为14 mm、厚度为0.08 mm、密度为2 650 kg/m3的AT切圆形石英晶片沿x轴方向施加一对5N径向力作用时石英晶片的内部应力分布进行仿真,如图4所示。根据石英晶体内力分布特点,在应力变化差异较大的位置设置电极可得到力—频系数差异较大的石英晶体谐振器[9,10]。
由石英晶体内部应力分布特点,设计制作了六电极石英晶体谐振器。晶片表面经抛光、老化,且边沿做宽为1 mm的倒边处理,在x轴正向与圆周相交点倒一个垂直于x轴的小口,弦长2~3 mm。在此圆形石英晶片上均匀设计6对金属电极,电极直径为1 mm,电极金属引线宽为0.5 mm。
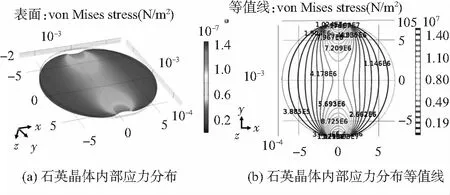
图4 石英晶体内部应力分布仿真
3 实验结果分析
选取2只完全相同的基频为20 MHz的六电极石英晶体谐振器,选用固化后刚性较好的“TS813结构胶”,把石英晶体谐振器和敏感结构部件粘结在一起形成姿态传感器转换结构样品,如图5(a)所示。把转换结构初样固定到倾斜台上,将两晶片上不同位置的谐振器与对应的激励电路连接,接通电源及频率计(Agilent—53132A),如图5(b)所示。并使各个谐振器独立工作于基频状态,旋转倾斜台,从-90°~+90°,用频率计每隔10°测量并记录各谐振器的谐振频率值。
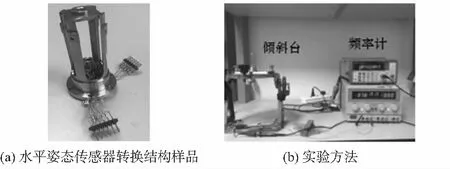
图5 水平姿态传感器样品与实验
基于以上的实验步骤,得到晶片P1,P2的各电极对应的谐振器的谐振频率,再通过对数据的整合,得到图6。可看出,姿态传感器转换结构初样在不同倾斜角度时的输出频率不同,并且随着倾斜角度的变化成正(余)弦变化,在-90°~+90°范围内,输出频率与倾斜角度一一对应。
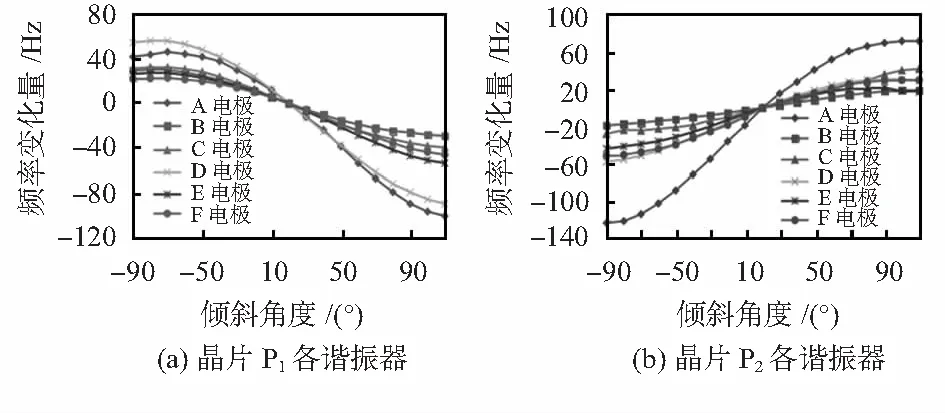
图6 两晶片谐振器输入—输出特性
4 结 论
通过对原理的分析以及基于Comsol Multiphysics有限元软件的仿真,得到在径向力作用下石英晶片内部应力分布特点。基于应力分布结果设计制作了六电极石英晶体谐振器,并通过粘接、焊接技术将谐振器晶片(P1、P2)和转换结构部件结合在一起制作成水平姿态传感器转换结构初样,样品固置于倾斜台上,旋转倾斜台至不同角度时的对谐振器谐振频率进行测量,对数据进行处理与分析可得,转换结构初样在不同倾斜角度时的输出频率不同,且随倾斜角度的变化成正(余)弦变化,在-90°~90°范围内,输出频率与倾斜角度一一对应。因此,本文设计制作的基于六电极石英晶体谐振器的姿态检测转换结构可作为相关姿态检测系统的敏感元件,对以后设计制作完整的水平姿态传感器等具有一定的指导意义。
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14 03:36:28
压电与声光(2019年1期)2019-02-22 09:46:06
测控技术(2018年8期)2018-11-25 07:42:16
传感器与微系统(2018年7期)2018-08-29 00:44:34
电子制作(2018年14期)2018-08-21 01:38:10
铜仁学院学报(2018年6期)2018-07-05 09:47:40
电子制作(2018年1期)2018-04-04 01:48:28
电子世界(2016年22期)2016-03-12 22:15:32
超硬材料工程(2016年1期)2016-02-28 22:20:04
振动、测试与诊断(2014年6期)2014-03-01 01:14:55
