无人机航拍球面全景图技术研究与实现
2019-09-25 06:14周文涛陈心雨张旻刘晓杰
江苏理工学院学报 2019年2期
周文涛 陈心雨 张旻 刘晓杰

摘要:球面全景圖技术是一种基于图像配准和拼接的技术,主要利用的是光学图像构建数据模型绘制虚拟场景,相比传统的三维建模绘制,其主要的优势表现在效率和效果上。近年来,球面全景图技术随着无人机技术和航拍技术的发展有了更大的应用平台,同时,更多相关的研究,如基于图像绘制的图像配准和拼接技术也将进一步受到重视。通过无人机拍摄获取图像,对拍摄的多张图像使用 SIFT 或SURF算法来提取图像中的特征点,同时,对这些特征点进行初步计算匹配时加入序贯相似性检测算法,由此完成图像拼接工作。通过研究和实验证明,采用算法既能提升匹配速度,又能得到较好的无缝拼接效果图。
关键词:无人机;航拍;球面全景图;图像拼接
那些通过常用的无人机拍摄平台拍摄获取的高分辨率影像,受到无人机飞行高度、所携带的数码相机焦距、成像效果以及高空间分辨率的限制,导致获取的单张图片的视野范围有限。为了获得区域的整体影像,并且以更加艺术和美观的球面方式展示出来,我们通过配准与拼接多张具有重叠区域影像的方式得到全景效果图。通过测试,比较SIFT算法和SURF算法的优势以及存在的问题,在保证画质优良的情况下,尽可能提升图像处理的速度和减少运算的时间,从而实现将无人机拍摄的多张影像快速自动拼接,达到自动且快速获取高分辨率和超大视角的球形全景影像的效果。
1 基于特征检测的算法
基于特征检测的算法不会因为传感器参数、无人机周围环境等因素的变化而变化,且能够对拍摄的图像快速完成配准和拼接工作,所以特征检测的方式在图像的配准和拼接研究、实验中得到广泛的应用。
特征检测是将图像上检测得到的特征当作配准单元,其主要由图像特征配准和区域配准两大类别组成。点、线、区域以及一些具有特殊结构的元素组成了匹配的关键元素,其中,点特征能够在旋转平移时保持不变,同时具有稳定性高、配准精度高、运算速度快的特点;因此,利用图像中的点特征来实现图像的配准和拼接,是如今应用最广泛且有效的方式。
1.1 SIFT算法
SIFT算法是一种选择与描述图像特征的算法,即使在画面缩放移动、方向角度变化以及明暗改变后,也能进行特征匹配。其具有稳定性高、匹配精度高、特征多量化、运算速度快、特征向量联合方便的特点;但是,在提取边缘光滑目标特征点时,体现出其能力较弱和实时性不足的缺点。[1]
1.2 SURF算法
SURF算法相较于SIFT算法,进行了一些算法的优化,使得运算更加高效,同时,也为使算法能够应用在计算机视觉系统中提供了一种可行的解决方法。SURF的优势在于使用的检测特征点为海森(Hesseian)矩阵的行列式值,辅以积分图加速运算,从而达到提升其效率的效果。
1.3 SIFT尺度空间
如图1所示,为了获得SIFT中的尺度空间,可以采用金字塔模型对图像滤波的缩放方式。为了获得若干组初始图像,需要SIFT算法对一幅图像进行下采样。为确保图像金字塔的连续性,每一组的初始图像都要以不同的[σ]进行高斯滤波,从金字塔的每一组图像中得到若干滤波后的图像,再将其分为若干组(Octave),进而再将组分为若干层(Layer)。由此可见,影响图像金字塔计算量的两大要素是金字塔的组数和层数。
1.4 SURF尺度空间
如图2所示,相较于SIFT算法,SURF算法不会进行下采样。SURF算法采用了一个初始尺寸为9×9的盒子滤波器,在SIFT算法的计算过程中,盒子滤波器的尺寸也会随之扩展,当高斯二阶微分函数的[σ]为1.2时,经过离散和减裁后9×9盒子滤波器便是滤波模板。[2]在SURF运算中,图像本身并不发生改变,为了获得不同尺度的图像,通过改变高斯滤波窗口的大小,也就能获得SURF算法的尺度空间。
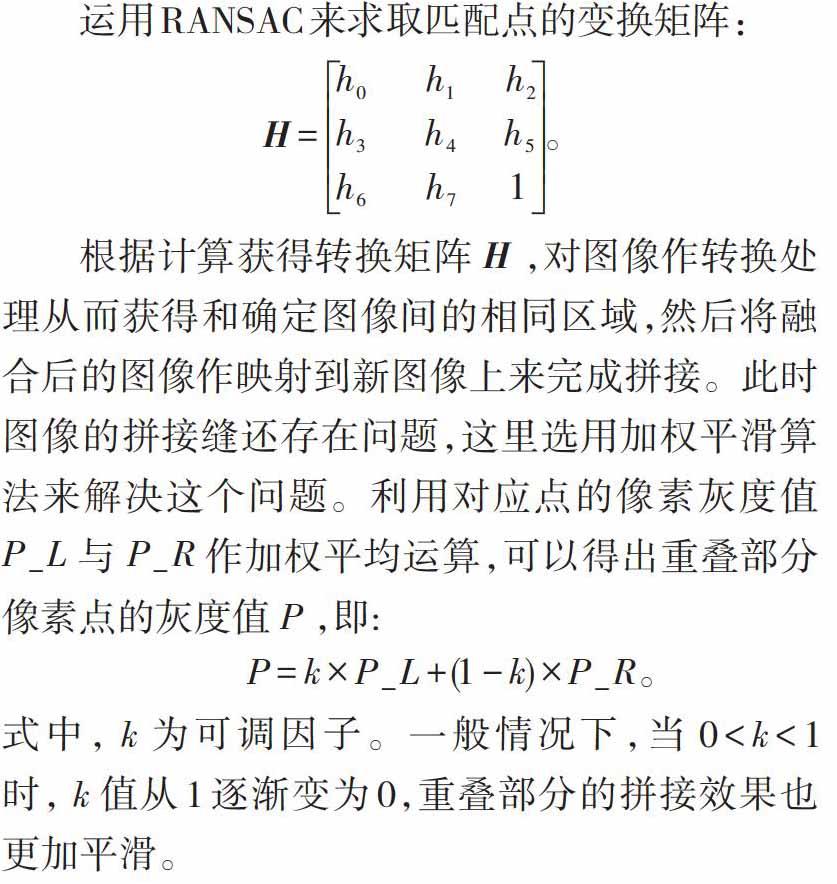
1.5 RANSAC 匹配算法
为了有效解决关键点匹配错误引起的问题,我们采用了RANSAC匹配算法,RANSAC匹配算法拥有不错的鲁棒性和容错性质,其核心理念是
使用相对较少的初始数据,使用一致的数据扩展这个数据集。当矩阵中匹配特征点最多时,为了获得最优单应性矩阵[H],需要使用RANSAC进行匹配。因为h33=1,所以单应性矩阵[H]存在8个未知的参数,这时需要由8个方程来求解。[3]在将这些数据代入到点位置时,一组特征匹配点可以得到两个方程,那么通过4组特征匹配点对就可以求解单应性矩阵[H]。
实际上,图像平移、方向及角度改变、光照变化等问题,都能通过SIFT算法和SURF算法得到较好的解决;因此,无人机在不同时间、不同角度拍摄多幅含有重叠区域的图像后,依然能够获得好的配准、拼接效果,从而大大减小了在时间和地点上的局限性。
参考文献:
[1] Surf算法特征点检测与匹配[EB/OL].[2019-04-17].https://blog.csdn.net/dcrmg/article/details/52601010.
[2] CV学习5 SURF算法详解[EB/OL].[2019-04-17].https:// www.cnblogs.com/gfgwxw/p/9415218.html.
[3] RANSAC 特征匹配算法解析[EB/OL].[2019-04-18].https://blog.csdn.net/Chenyukuai6625/article/details/75282 404.
[4] 孙俊.基于视频的目标运动轨迹提取系统的研究与实现[D].武汉:武汉理工大学,2013.
[5] SIFT特征和SURF特征比较[EB/OL].[2019-04-18].https://blog.csdn.net/blateyang/article/details/76512398.
猜你喜欢
时代邮刊·下半月(2020年9期)2020-09-23
计算机与网络(2019年6期)2019-09-10
照相机(2019年4期)2019-09-10
航空模型(2017年12期)2018-05-08
海峡摄影时报(2016年10期)2016-11-16
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
企业导报(2016年9期)2016-05-26
数码影像时代(2015年2期)2015-07-07