
基于AHP 的车辆半主动悬架LQG 控制方法研究*
2019-09-21 03:45:04孙宇菲陈双姜强
汽车实用技术 2019年17期
孙宇菲,陈双,姜强
(辽宁工业大学汽车与交通工程学院,辽宁 锦州 121000)
前言
针对半主动悬架来说,控制方法的选择和设计,是确保车辆性能良好的关键。本文建立了2 自由度1/4 车辆模型,并基于层次分析法确定加权系数[1-2],从而完成对LQG 控制器的搭建,利用Matlab/Simulink 软件仿真验证该控制器的有效性,然后完成对其结果的分析。
1 建立车辆模型及路面模型
首先建立2 自由度1/4 车辆模型[3],运用牛顿运动定律,得到单轮车辆模型的运动方程为:

路面输入采用滤波白噪声模型:

2 半主动悬架系统LQG 控制器设计
通过LQG 线性最优控制,将车体加速度、悬架动行程、轮胎动位移及控制力输入作为评价标准[4]。则指标泛函为:

由各个时间点X(t)反馈,可得出t 时最佳控制律U,即:

2.1 基于层次分析法确定加权系数
(1)构造比较矩阵H
比较规则如表1。若在两个比值间,取2,4,6,8。

表1 各评价指标重要性比较值
先求乘积向量 M,为比较矩阵H 各行元素的乘积正则向量W,。W 为评价指标的权重系数。
(3)验证指标比较一致性
(4)主观加权比例系数

确定最终加权比例系数:
设车身垂向加速度的同尺度量化比例系数为1,其他指标加权系数βi为,则最终加权系数为:

3 仿真实验与分析
应用层次分析法可求得比较矩阵H 为:

确定加权系数矩阵为:

调用Matlab 中LQG 工具箱,求出最优反馈控制率K。

在Matlab/Simulink 中搭建车辆模型,并以80 km/h 的车速在B 级路面上行驶,图1-图2 分别是被动悬架和基于层次分析法的半主动悬架性的仿真对比曲线。

图1 车体垂向加速度对比
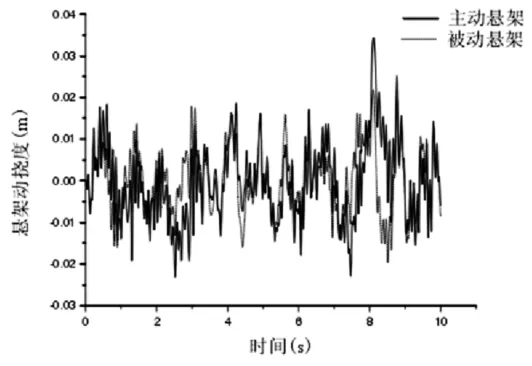
图2 悬架动挠度对比
经仿真得到被动悬架、Zsu分别为0.92m/s2、16.7mm;半主动悬架 、Zsu分别为0.78m/s2、13.89mm。可以看出:
(1)对比被动悬架,基于AHP 的半主动悬架,其控制效果都得到了改善,评价指标也得到了一定程度的优化,证明了这种方法的适用性。
(2)应用AHP 确定LQG 控制器加权系数的半主动悬架,其评价指标均方根值改善了15%、16%;综合考虑,应用AHP 的LQG 控制器有良好的控制效果,提高了汽车行驶平顺性和舒适性。
4 结论
应用AHP 确定LQG 控制器的加权系数,实现对半主动悬架LQG 控制器的设计,与被动悬架进行仿真对比分析。仿真结果表明:采用上述方法确定加权系数的LQG 控制器,能够综合改善悬架各项性能,抑制车体加速度及悬架动挠度效果尤为明显,改善了汽车行驶平顺性和舒适性,适用性较强。
猜你喜欢
防爆电机(2022年4期)2022-08-17 05:59:06
装备制造技术(2020年11期)2021-01-26 00:38:58
中国交通信息化(2017年9期)2017-06-06 07:14:54
北京汽车(2016年6期)2016-10-13 17:07:50
项目管理技术(2016年8期)2016-05-17 05:39:14
现代制造技术与装备(2015年4期)2015-12-23 10:20:18
中国石油大学学报(自然科学版)(2015年2期)2015-11-10 06:08:17
中国交通信息化(2015年3期)2015-06-05 03:53:39
振动、测试与诊断(2014年6期)2014-03-01 01:14:59
汽车维护与修理(2014年10期)2014-02-28 12:15:00
