
基于干扰观测器的机械臂改进趋近律的滑模控制
2019-09-20 02:04:38
测控技术 2019年1期
(兰州交通大学 自动化与电气工程学院,甘肃 兰州 730070)
机械臂因其独特的灵活性,已在农业采摘、安全防爆、医疗卫生等领域得到了普遍的应用,但由于机械臂是一类多输入多输出、存在参数不确定性、外界干扰及未建模动态等不确定性的非线性系统,这些因素增加了精确控制的难度[1-2]。因此,提高机械臂控制系统的稳定性和精确性有现实的需求。
滑模变结构方法可以较好地克服系统参数变化以及外界干扰带来的影响,实现对机械臂的有效控制,但其在控制过程中产生的抖振现象会对机械臂的安全性、稳定性、精确性产生较大影响,因此抖振削弱问题引起众多学者的关注[3-5]。文献[6]提出一种改进的幂次趋近律,对其趋近性能进行分析,有效抑制系统抖振,但没有考虑摩擦与外界干扰的影响。文献[7]提出一种多幂次滑模趋近律,该趋近律通过3个幂次项系数在系统趋近过程的不同阶段进行针对性调节。文献[8]采用状态观测器对系统外部的干扰进行实时估计,利用模糊控制策略对非线性误差反馈控制加以改进,从而实现误差反馈增益的优化整定。文献[9]对引入干扰观测器的机械臂系统采用滑模反演法设计控制器,提高了跟踪性能,但设计过程略显复杂。
本文综合考虑上述问题,针对存在抖振问题和外部干扰等不确定因素影响下的机械臂轨迹跟踪控制,提出了一种改进指数趋近律,并将干扰观测器与滑模控制策略相结合。改进趋近律可以有效削弱抖振;干扰观测器对系统的不确定因素和外界干扰进行观测和补偿;利用滑模控制器对未观测到的干扰进行补偿。仿真结果验证了该控制策略的有效性和优越性。
1 机械臂数学建模
由拉格朗日运动学可以建立机械臂的N关节动力学方程:

(1)

式(1)所描述的机械臂系统具有如下动力学特性。

特性2 惯性矩阵M(q)是对称正定矩阵,其逆M-1(q)存在,并且存在正数m1、m2满足如下不等式:
m1‖x‖2≤xTM(q)x≤m2‖x‖2


由于系统存在外部干扰信号,在设计过程中为使观测器能够较好地跟踪期望的输入角度qd,在设计时做出如下假设:
假设1 期望角度qd及其n阶导数存在且有界。
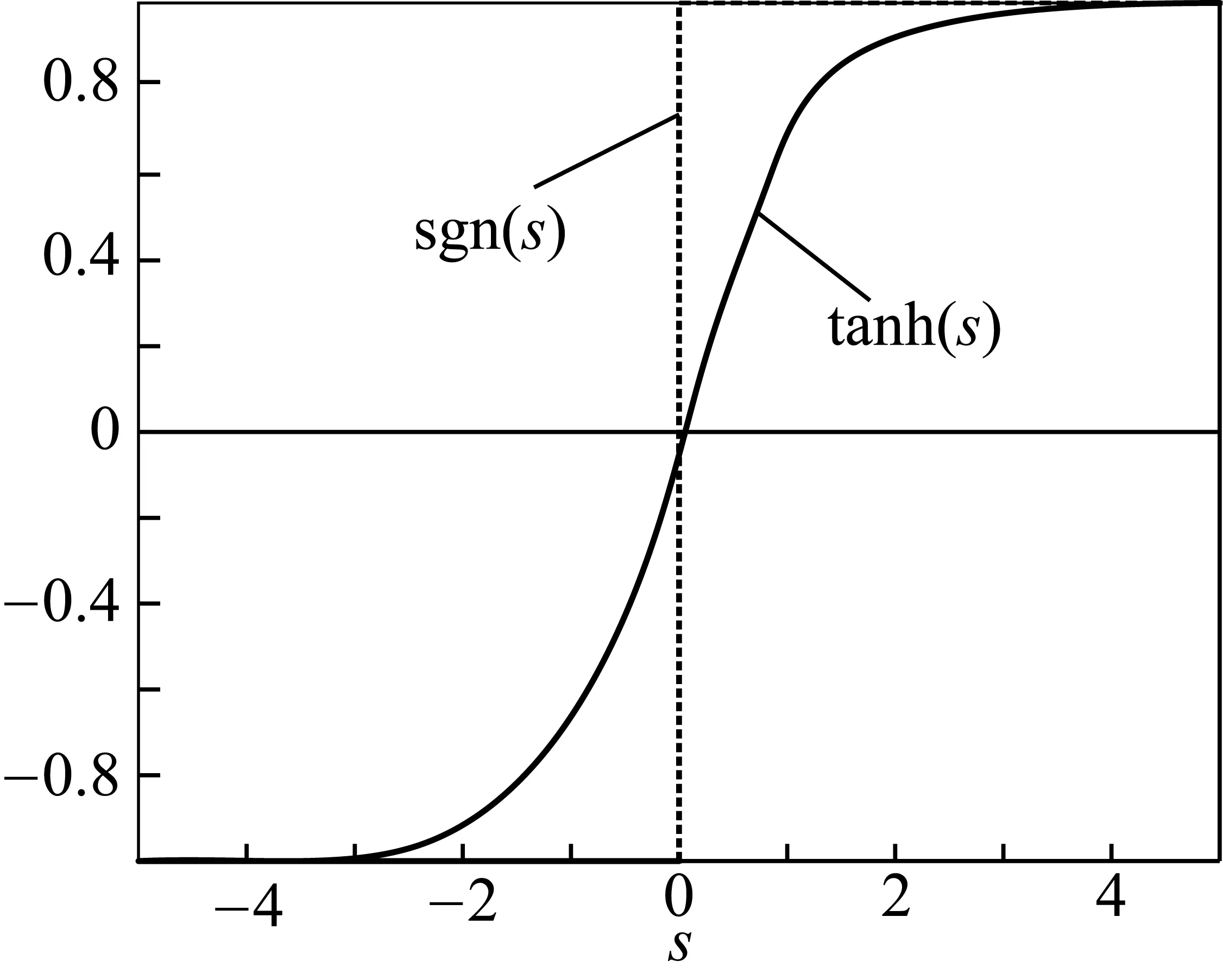
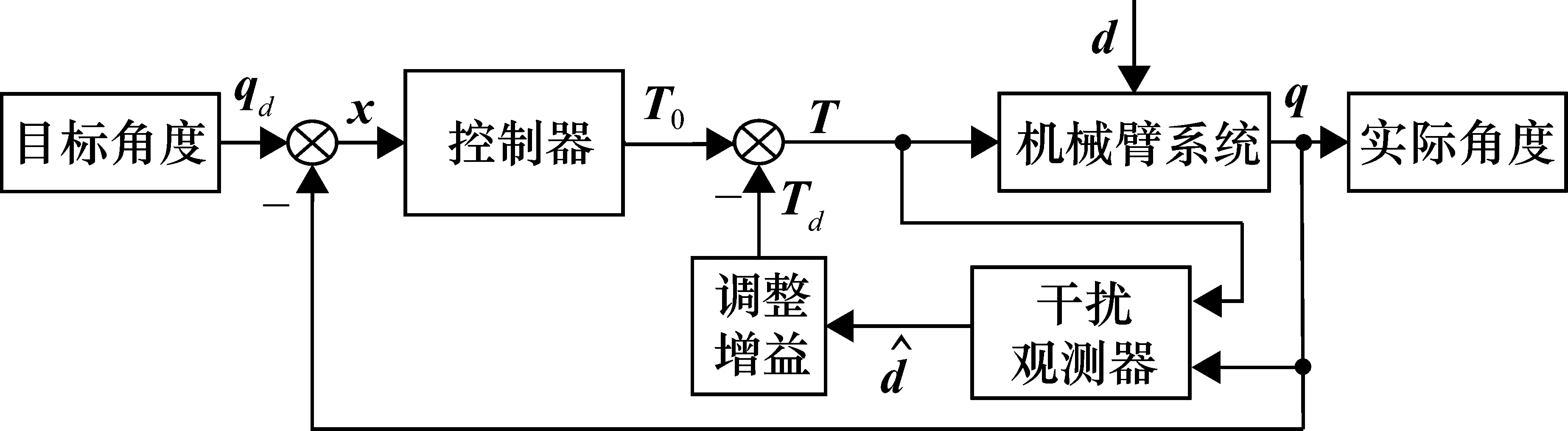
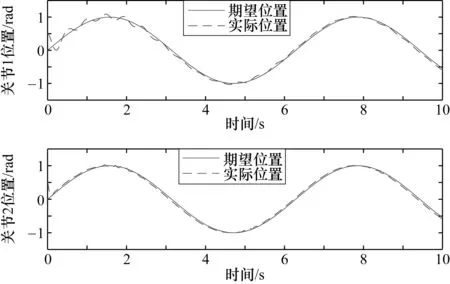
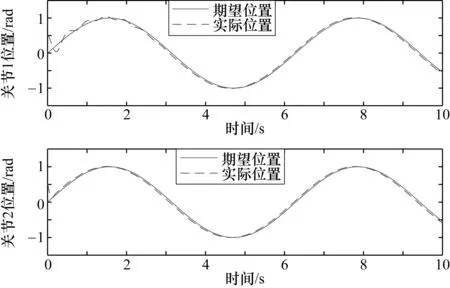
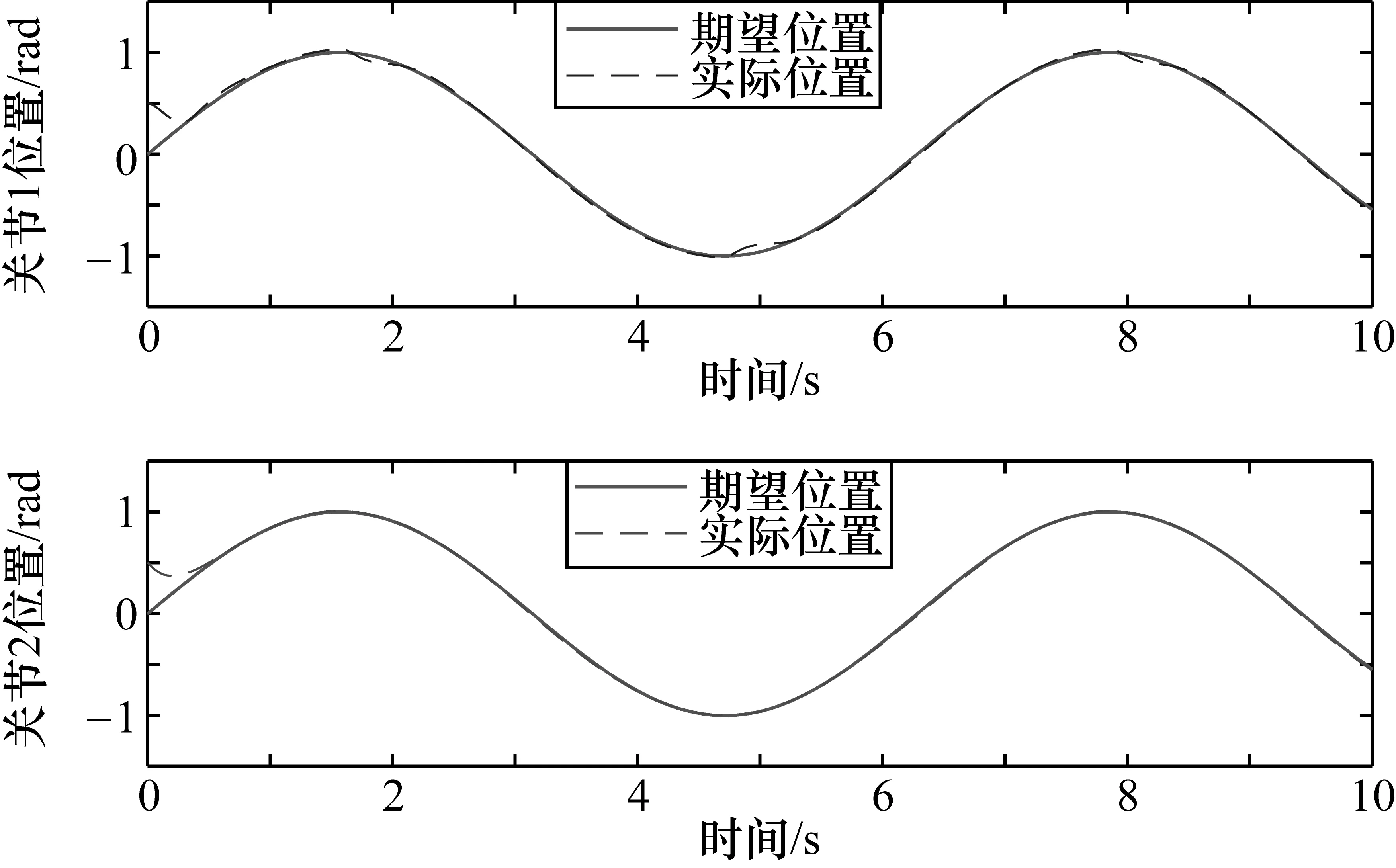
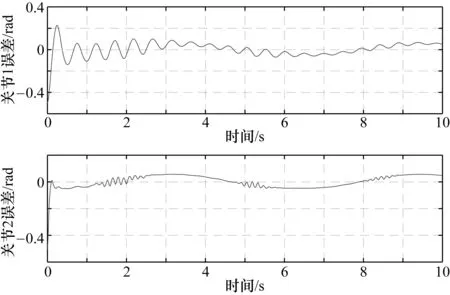
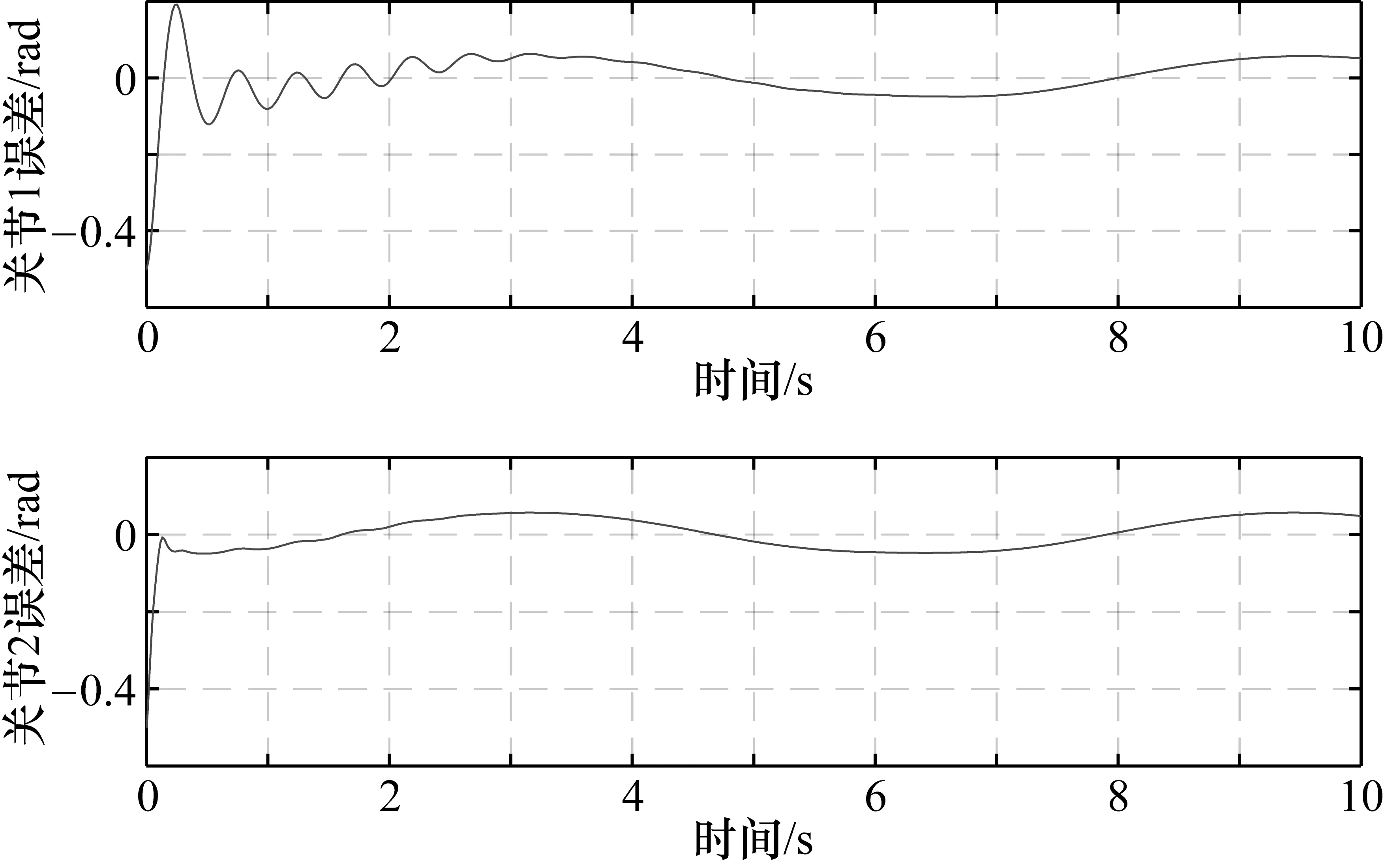
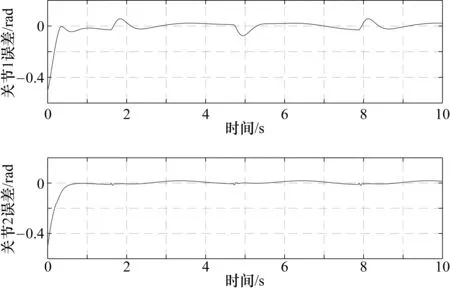
假设2 外部干扰信号d有界且界在机械臂系统可承受范围,即|d| 由于指数趋近律具有参数可调节,趋近速度快,可在有限时间内收敛的优点,所以在此基础上进行改进。 指数趋近律为 (2) 式中,k、ε均为常数;s为滑模面。 指数趋近律可以加快趋近滑模面的速度,但是由于其为带状,系统在向原点运动的过程中,不能趋近于原点,而是在原点两侧做抖振运动,会对机械臂造成损伤,对系统的跟踪精度造成一定影响。因此,对指数趋近律进行了改进,如式(3)所示: (3) 由式(3)可以看出,式中加入了s2,在趋近运动的开始阶段,由于离滑模面远,运动速度快,系统误差较大,但可以快速接近滑模面;随着运动的进行,控制器的调节,系统误差将逐渐变小,s2也随之减小,系统逐渐趋于平稳,抖振有效减小。 由于式(3)中含有符号函数,符号函数实质上是分段函数,其切换具有不连续性,控制输出一定会出现抖振现象;而饱和函数为连续函数,可使输出平滑有界。因此,在改进控制律设计中采用双曲正切函数来取代符号函数,双曲正切函数为 (4) 其中,e为自然常数。 图1为sgn(s)与tanh(s)的比较曲线,从图中可以看出,tanh(s)连续且平滑,一次性穿越0点,这对趋近过程中的抖振现象有较好的抑制效果。 图1 双曲正切曲线与符号函数曲线比较 因此,改进后的趋近律为 (5) 由于 (6) 式(6)满足趋近律到达条件,改进趋近律可以到达滑模面。在引入双曲正弦函数抑制抖振的同时,系统的跟踪速度会有所降低,为了保证系统的动态性能,在系统允许的范围内,增大式(6)中的k值并相应减小ε可以使趋近过程变快,同时有效削弱系统抖振。 在机械臂控制系统中,给定一个输入信号qd作为期望角度,输入期望角度qd与实际角度q作差输出误差信号x,将该信号输入到滑模控制器中,经过滑模控制器处理会输出一个控制力矩T0与干扰观测器经调整增益后输出的力矩Td作差,产生最终的控制力矩T(即T=T0-Td),将T输入机械臂系统中,从而实现对整个系统的控制。 由于存在外部干扰信号d,在控制器具体设计中将其分为两部分:一部分为可观测部分(如系统摩擦);另一部分为不可观测部分(随机外部干扰)。在具体设计中,可观测的部分由干扰观测器进行观测,未观测到的部分由滑模控制器进行补偿,系统控制框图如图2所示。 图2 基于干扰观测器的机械臂滑模控制框图 根据机械臂的数学模型,采用如下干扰观测器: (7) (8) (9) 假设相对于干扰观测器的动态特性,干扰的变化是缓慢的,即 (10) 由式(8)、式(10)可得干扰观测器的动态方程为 (11) 将式(7)和式(8)代入式(11): (12) 综合式(1)和式(7),可将式(12)变为 (13) 因而得到 (14) 干扰观测器的输出传输到增益调整模块,将观测到的干扰转化成相应输入通道的控制量,结合式(1)可知增益调整矩阵为单位阵,则 采取干扰观测器后,可将式(1)的数学模型变为如式(15)所示: (15) 由式(15)可知,经干扰观测器补偿后,外界干扰由d减小为e,有效地减小了外界干扰对系统的影响。 假设机械臂期望关节角为qd,x=qd-q为误差信号。设计滑模面为 (16) 当系统到达滑模面时,对于任意给定的初始点x(0),系统将稳定运行并在有限时间内到达平衡点。此外,通过设计常数矩阵B,可使控制系统具有较好的动态品质。 下面进行控制律的设计。由于误差为x=qd-q,滑模面为 (17) 将滑模面求导,可得 (18) 将式(15)带入式(18)中可得 (19) 由式(5)和式(19)可得控制律为 (20) 机械臂系统的动力学模型为[10]: 式中, p=[p1,p2,p3,p4,p5]=[0.29,0.076,0.087,0.304,0.087] 为了验证所提控制策略的正确性和有效性,分别从轨迹跟踪、位置跟踪误差以及干扰观测结果3个方面比较传统滑模控制策略与改进趋近律的控制策略。 图3 传统滑模控制轨迹跟踪曲线(无干扰观测器) 图4 传统滑模控制轨迹跟踪曲线(含干扰观测器) 比较图3、图4曲线可以看出,两曲线在关节1处抖振明显,跟踪效果差;观察关节2处的跟踪曲线可以看出图4中曲线的波动较小,可以大致跟踪给定的轨迹,但其效果并没有达到最优。说明干扰观测器有效减小外界干扰对系统的影响,但系统仍然存在抖振现象。 图5 改进趋近律的轨迹跟踪曲线(含干扰观测器) 对比图4、图5跟踪曲线可以看出,采用改进趋近律的滑模控制策略,关节1处抖振明显减小,关节2处在大约0.3 s时轨迹基本重合,说明改进趋近律可以有效减小抖振。 图6 传统滑模控制轨迹跟踪误差曲线(无干扰观测器) 图7 传统滑模控制轨迹跟踪误差曲线(含干扰观测器) 从图6、图7可以进一步看出,两图都有较大的跟踪误差,当采用干扰观测器后,关节1在3 s以后误差波动逐渐平稳,关节2的最大误差减小到0.057 rad左右,说明干扰观测器可以削弱外界干扰对系统的影响。 图8 改进趋近律的轨迹跟踪误差曲线(含干扰观测器) 比较图7、图8曲线,从图7曲线可以看出未改进趋近律时跟踪误差较大,抖振幅度大,很难进行有效跟踪;图8曲线可以明显看出采用改进控制律后,在0.6s以后,跟踪误差几乎为0,跟踪速度快且抖振小。 图9为干扰观测器观测结果曲线,虽然在关节1转折点处难以较好地跟踪,但在关节2处可以实现对干扰的观测。曲线表明采用干扰观测器能够快速准确地估计干扰信号,从而进一步对观测到的干扰进行消除,减小干扰对系统的影响。 针对多关节机械臂滑模控制存在抖振与外界干扰的问题,设计了一种基于干扰观测器的改进趋近律的滑模控制策略。在设计控制器的过程中,趋近律可以有效减小抖振,干扰观测器对外界可观测的干扰进行观测,然后采用滑模控制器对其余的不确定部分进行补偿,从而使系统输出能跟踪期望轨迹,保证系统的安全性和稳定性。仿真分析表明,与传统滑模控制策略相比,该策略不仅能够减小外界干扰对系统的影响,而且可以有效削弱抖振,加快系统响应速度,增强系统稳定性。2 趋近律设计

3 基于干扰观测器的滑模控制器设计
3.1 干扰观测器的设计








3.2 滑模面设计
4 仿真分析



5 结束语
猜你喜欢
能源工程(2020年6期)2021-01-26 00:55:22
山东冶金(2019年3期)2019-07-10 00:54:04
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
消费导刊(2018年10期)2018-08-20 02:57:02
通信电源技术(2016年1期)2016-04-16 04:57:26
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
