
四轴飞行器改进型串级姿态控制算法仿真研究
2019-09-19 07:33翔王彦柱赵红亮
测控技术 2019年6期
姜 翔王彦柱赵红亮
(1.西安建筑科技大学 建筑设备科学与工程学院,陕西 西安 710055;2.西安建筑科技大学 信息与控制工程学院,陕西 西安 710055)
四轴飞行器因其具有结构简单、灵活性强、可实现垂直起降和扩展功能多样化等优势成为航空领域的研究热点之一[1],在电力巡检、抢险救灾等民用领域和战场破坏评估、敌情侦察及监视等军事领域具有广阔的应用前景[2]。
四轴飞行器具有欠驱动、非线性、多变量、强耦合的特点[3],常见姿态控制方法有PID控制[4]、滑模控制[5]、反步控制[6]、鲁棒控制[7-8]和自适应控制[9]等。
非线性控制较依赖于模型准确性,而实际中四轴飞行器受空气动力和陀螺效应等多种物理效应的作用,同时还受到气流等外部环境因素干扰,难以获取其准确的气动性能参数,建立的动力学模型与实际系统有较大偏差[10];非线性控制算法结构比较复杂,较难用于实际控制。
本文采用只需要输入输出模型的PID控制[11],针对PID控制中存在的“理想微分高增益”和“偏差微分”问题,设计了四轴飞行器改进型串级姿态控制算法。仿真实验结果表明,提出的控制算法具有收敛速度快、超调小、抗干扰性强等特点。
1 四轴飞行器动力学模型
四轴飞行器的结构如图1所示,可通过调整4个驱动旋翼的无刷电机的转速来调节其飞行姿态角和位置运动,是一个典型的欠驱动系统。

图1 四轴飞行器系统结构示意图
目前,四轴飞行器的建模多采用Newton-Euler法,对四轴飞行器进行受力分析和建模[12-13],在此基础上,本文进行简化分析假设如下:
① 飞行器为刚体运动,结构对称,质量均匀;
② 不计空气阻力、忽略陀螺效应;
③ 飞行器的重心与机体坐标系原点重合。

(1)
式中,R为机体坐标系到惯性坐标系的旋转矩阵[14]。
(2)
式中,Sφ,Cφ分别表示sinφ和cosφ,同样应用于θ,ψ。将式(1)展开得到飞行器的平动方程:
(3)
将四轴飞行器视作刚体,刚体除了线运动之外,还存在角运动。令Mx、My、Mz表示各个轴所受力矩,Ix、Iy、Iz为飞行器各轴转动惯量,在机体坐标系下,由欧拉公式得
(4)
即
(5)

(6)
为了便于四轴飞行器控制系统的设计及表示,引入高度控制量U1、横滚控制量U2、俯仰控制量U3、偏航控制量U4,得到四轴飞行器的动力学方程:
(7)
U1、U2、U3、U4与四轴飞行器旋翼转速之间的关系如下:
(8)
2 四轴飞行器改进型串级姿态控制算法
设计
2.1 四轴飞行器串级姿态控制
在研究中发现单级PID姿态控制调节时间长、超调大,并且跟踪稳态误差较大。而串级控制具有超调小、调节时间短、抗干扰能力强等特点。根据四轴飞行器动力学方程将姿态控制系统设计为图2所示串级控制结构,系统分为俯仰、横滚、偏航、高度4个独立控制子系统[15]。

图2 四轴飞行器串级姿态控制框图
图2中内环(副回路)是控制线速度和角速度的随动系统,采用PD控制提高其快速性;外环(主回路)是控制高度和姿态角的定值控制系统,采用PID控制。
根据动力学模型和串级姿态控制框图,建立四轴飞行器串级控制Simulink仿真模型如图3所示。

图3 四轴飞行器串级控制仿真模型
在串级PID姿态控制仿真模型上进行实验发现:
① 在高度跟踪控制实验中,随着高度设定值快速变化,在“偏差微分”作用下,造成四轴飞行器控制量的超调也逐渐增大,使其稳定飞行存在较大的安全隐患(如图8所示)。
② 在抗干扰实验中,因“理想微分高增益”使四轴飞行器不能抑制高频机体振动,各子系统控制呈发散状态,无法实现飞行稳定控制(如图9所示)。
2.2 改进型串级姿态控制
针对PID控制算法存在的“偏差微分”和“理想微分高增益”问题做出如下改进。
① 引入“不完全微分”对“理想微分高增益”的幅度加以限制。改进后PID控制器传递函数的频率特性见式(9),频率特性曲线如图4所示。
(9)
式中,Ti>Td>Td/N。
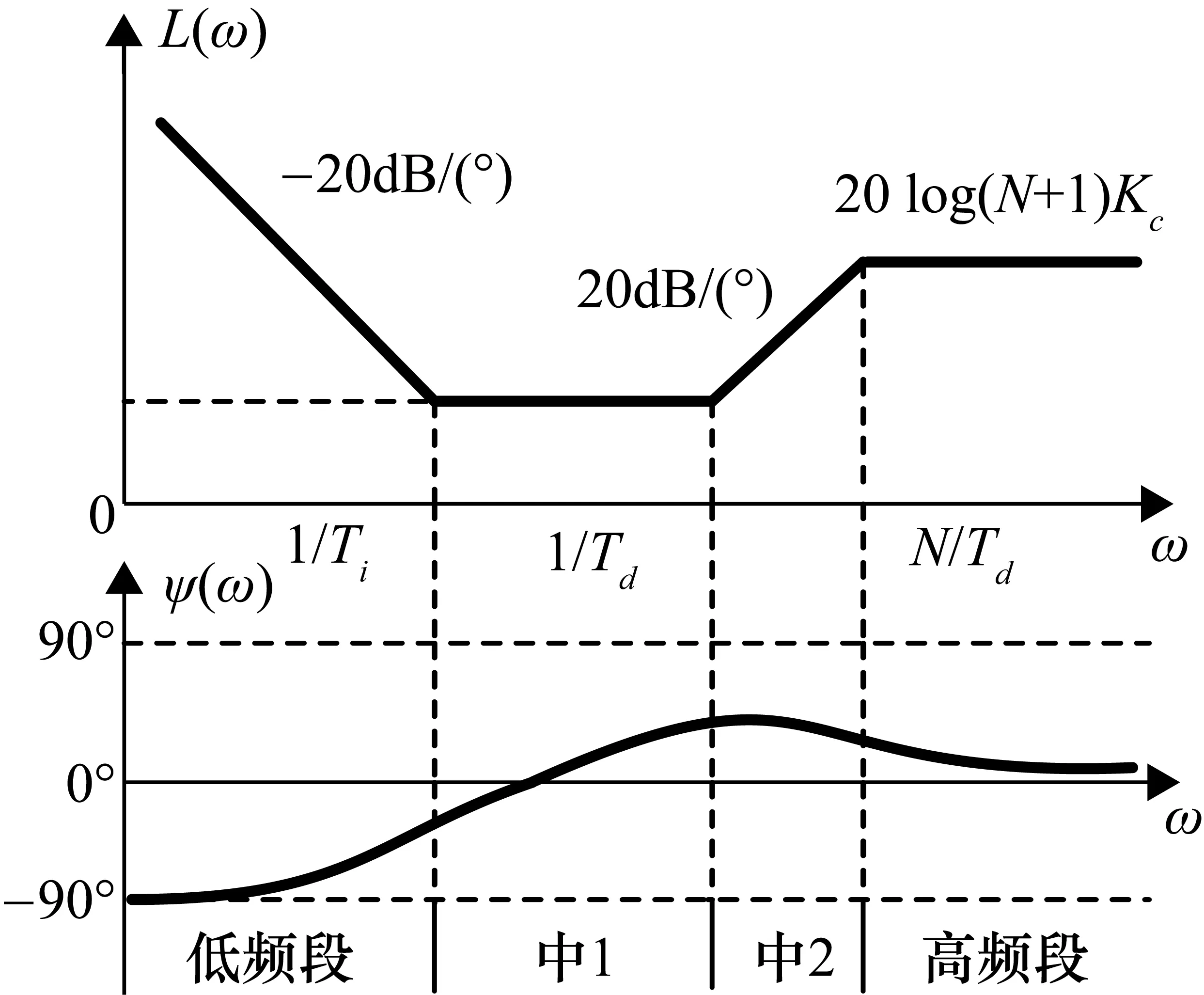
图4 PID控制器的频域特性曲线
改进后,低频段反映积分特性,增益大有利于减小稳态误差;中频段1的幅频特性曲线为一段直线,体现了“比例动作”;中频段2是微分作用;高频段反映“不完全微分”特性,限制过高增益对高频噪声的放大,同时相位超前作用有利于加快系统响应速度。
② 针对“偏差微分”问题,采用“微分先行”的方法,对测量值进行微分,避免给定值快速变化对系统的冲击,增强飞行系统的稳定性。
最终得到改进型PID控制器见式(10)所示,内部结构如图5所示。
(10)

图5 改进型PID控制器内部结构图
并得到改进型四轴飞行器串级姿态控制仿真模型如图6所示,其中对改进型PID控制器进行了封装。
3 仿真实验及结果分析
在Matlab/Simulink平台上对图6所示模型进行仿真实验,四轴飞行器仿真参数见表1。
按照高度、偏航、横滚、俯仰的顺序,整定每个子系统的副回路和主回路的控制参数,按先比例、后微分、再积分的整定步骤,最后进行联调,确定改进型串级控制器参数见表2。
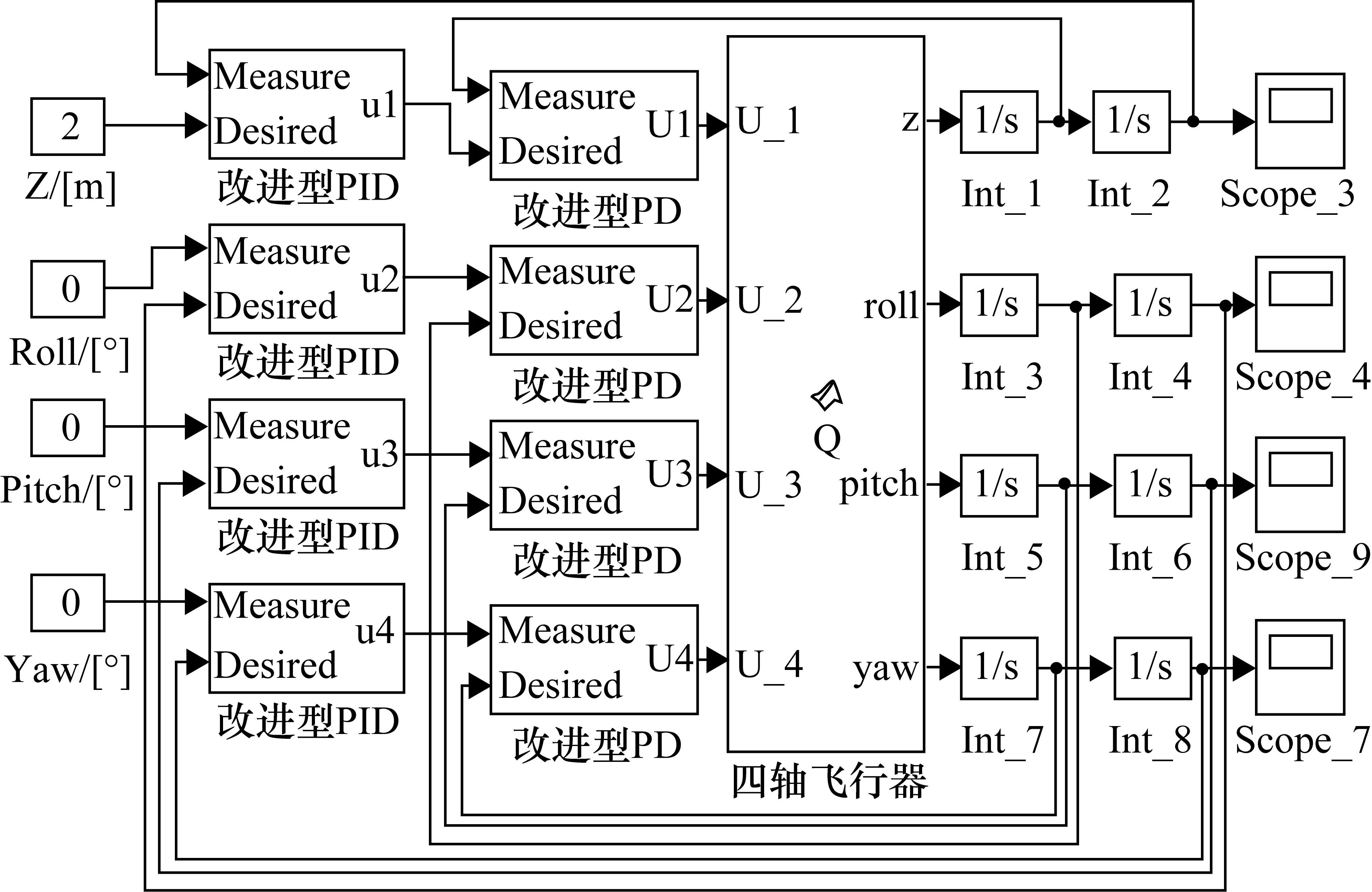
图6 改进型串级姿态控制系统仿真图

符号物理意义数值单位m四轴飞行器总质量1kgIxx轴的转动惯量8.1×10-3kg·m2Iyy轴的转动惯量8.1×10-3kg·m2Izz轴的转动惯量1.42×10-4kg·m2l质心与旋翼中心距离0.24mλ升力系数5.42×10-5m/s2μ阻力系数1.1×10-6N·s2g重力加速度9.81m·s2

表2 改进型串级控制器参数
3.1 姿态稳定控制实验
设定初始值:高度横滚角φ0=5°,俯仰角θ0=5°,偏航角ψ0=5°。控制目标:四轴飞行器从0 m初始高度飞行到5 m,同时保持姿态稳定。仿真结果如图7所示,性能指标见表3。
由图7知,串级控制和改进型串级控制都实现了四轴飞行器的平稳飞行控制。由表3可见改进型串级控制可实现四轴飞行器无超调姿态控制,调节时间仅需0.5 s;串级控制也可实现较好的姿态控制效果,但高度控制有1.4%的超调量,且各子系统收敛时间为1.5 s。改进型串级控制收敛时间减小,且平稳性增强。
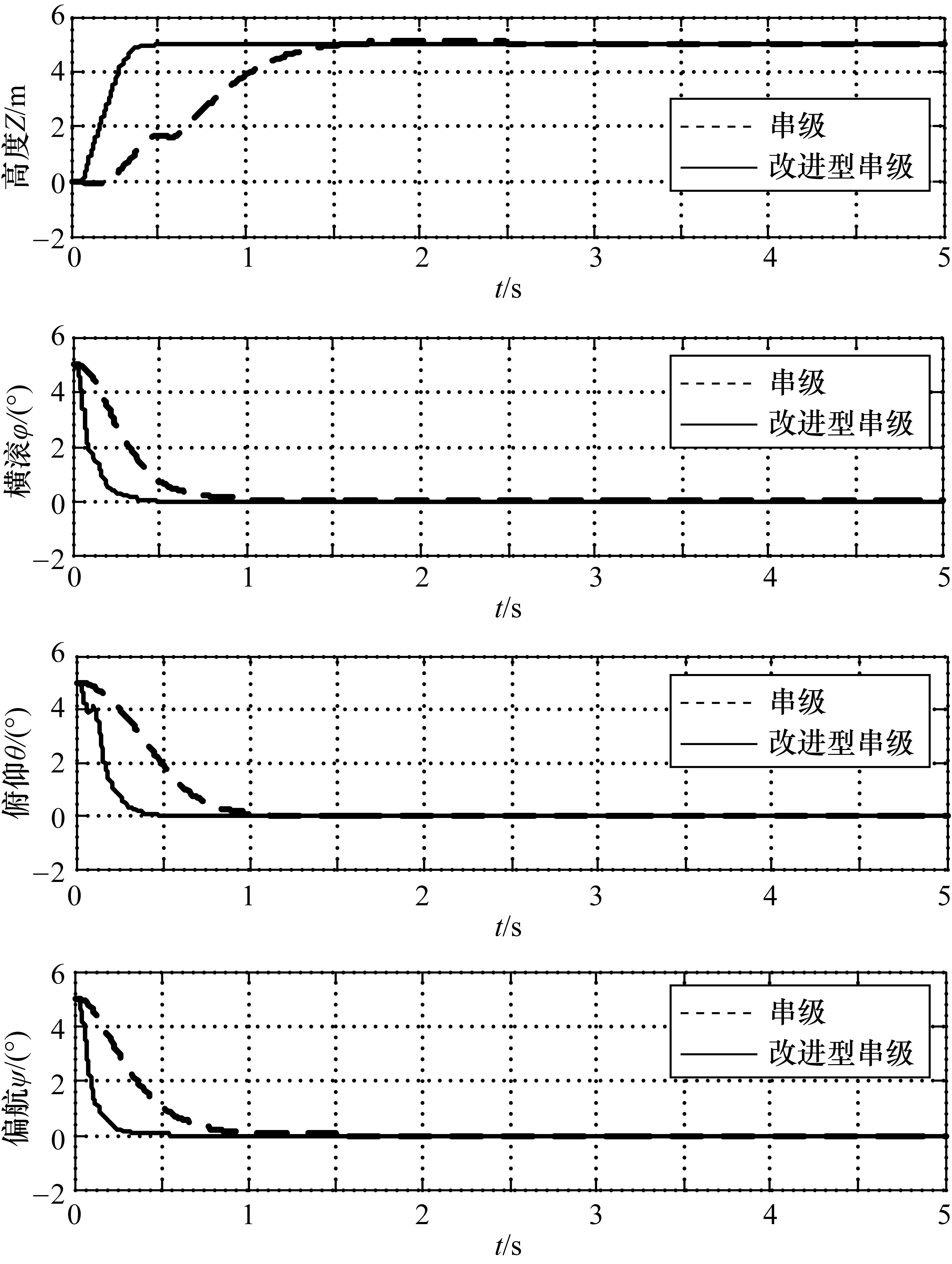
图7 高度响应曲线和姿态控制响应曲线
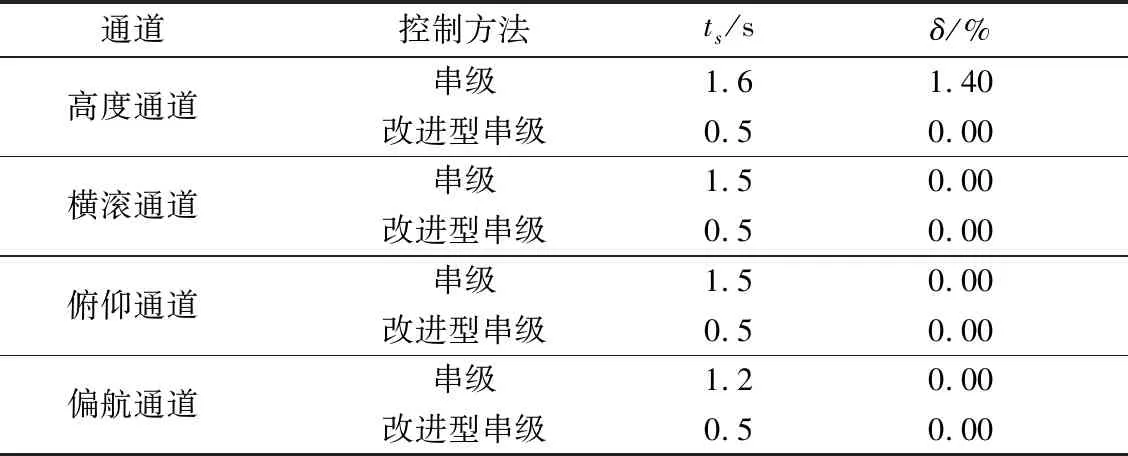
通道控制方法ts/sδ/%高度通道串级1.61.40改进型串级0.50.00横滚通道串级1.50.00改进型串级0.50.00俯仰通道串级1.50.00改进型串级0.50.00偏航通道串级1.20.00改进型串级0.50.00
3.2 高度跟踪控制实验
四轴飞行器实际飞行中,高度跟踪飞行是较为常见的飞行要求。飞行要求:四轴飞行器从0 m飞行上升到5 m,5 s后设定飞行期望高度为10 m,跟踪斜率K分别为1、10、100,使四轴飞行器从5 m飞行上升到10 m,实现高度跟踪飞行控制。实验响应曲线如图8所示。
从图8中可知,随着跟踪斜率逐渐增大,串级控制的超调也逐渐增大,这是由于串级控制器的微分项是根据偏差计算的,给定值从5 m变化到10 m,跟踪斜率越大,偏差微分作用越大,使飞行系统出现较大的超调量。改进型串级控制器采用微分先行,对测量值进行微分作用,从而避免给定值快速变化对系统的冲击,实现了快速且无超调的高度跟踪控制。

图8 高度跟踪控制实验
3.3 姿态抗干扰实验
四轴飞行器在实际飞行中,无刷电机的高速转动产生高频振动噪声,会影响无人机控制的稳定性。下面实验将高频噪声加入到四轴飞行器的反馈通道中,利用Simulink中的“Bank-Limited White Noise”模块产生高斯白噪声来模拟高频噪声,其中Noise power=0.001,Seed=[23321],频率ω为2 kHz。
在姿态抗干扰实验中,控制系统加入高频噪声干扰后,串级控制无法克服高频噪声干扰,姿态角和高度控制都呈发散失控态,不能实现稳定控制的要求,响应曲线如图9(a)所示。改进型串级抗干扰实验响应曲线如图9(b)所示,各个通道误差见表4。

表4 姿态抗干扰终值误差带范围参数
从图9和表4可以看出,改进型串级控制误差保持在±5%以内,可以实现在高频干扰下四轴飞行器的稳定姿态控制,抗干扰较好。
4 结束语
针对四轴飞行器的PID姿态控制存在的问题,设计了“不完全微分”和“测量微分先行”的改进型串级控制算法来克服PID控制器的“理想微分高增益”和“偏差微分”问题。通过仿真实验发现,姿态稳定控制中各子系统收敛时间比串级快0.7 s以上且无超调;高度跟踪控制可有效抑制给定值快速变化引起的冲击,实现快速无超调的跟踪控制;高频噪声干扰下姿态控制误差保持在±5%范围内。改进型串级控制算法满足四轴飞行器稳定飞行的控制要求,收敛速度快,同时具有良好的动态和稳态性能。

图9 抗干扰实验响应曲线
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
一重技术(2021年5期)2022-01-18
北京航空航天大学学报(2021年9期)2021-11-02
自动化学报(2018年2期)2018-04-12
电子制作(2017年20期)2017-04-26
轻兵器(2016年20期)2016-10-28
科技视界(2016年8期)2016-04-05
通信电源技术(2016年4期)2016-04-04
湖南大学学报·自然科学版(2016年2期)2016-03-15
北京航空航天大学学报(2016年3期)2016-02-27
