
液压高速冲击模拟系统
2019-09-17 11:26:26
液压与气动 2019年9期
(海装武汉局, 湖北 武汉 430064)
引言
高速冲击模拟试验是研究材料疲劳特性或极限参数的重要试验手段,主要利用惯性撞击的基本原理,利用物体之间惯性碰撞产生冲击,从而在碰撞物体之间产生动能和重力势能或者其他形式能量瞬间传递和转化[1]。常用的高速冲击模拟方法有重力冲击、液压冲击和爆炸冲击等[2]。重力冲击是将物体的势能转化为冲击动能,该方法容易实现,控制方式简单,装机功率小,但是能量利用率低,可控性差,速度难以精确控制[3];常见的爆炸冲击包括化学物爆炸冲击和高压气体释放爆炸冲击2种形式,它可以提供最大瞬态冲击能,结构简单,但因冲击能难以准确控制,操作过程危险而应用较少[4]。
液压冲击是利用液压能形成强大的冲击能,一般是选用阀控缸系统作为能量转换器,速度能无极调节,程控性好,试验操作安全方便,但是对控制系统的要求也比较高。在许多冲击模拟应用中,例如汽车零部件冲击试验、弹体撞击试验,对冲击点与速度的可控性和试验过程的安全性与便捷性都提出了越来越高的要求,因此液压冲击是比较理想的冲击试验方式。
本研究设计了一套液压式高速冲击模拟系统,采用高压蓄能器供油,通过伺服阀控缸系统将液压能转换为冲击能,模拟弹体冲击速度和加速度的动态变化过程,并且具有冲击角度调整功能。
1 液压冲击原理
液压冲击的工作原理是将具有一定压力和流量的液压能通过阀控缸系统转换为具有一定速度和冲击力的机械动能[5],原理图如图1所示。它由伺服阀控缸系统、换向阀控缸系统、套筒及支座等组成。伺服阀控缸系统安装在套筒内,用于产生冲击动能;换向阀控缸系统安装在套筒和支座之间,用于调整套筒的俯仰角,从而改变冲击角度。这2套阀控缸系统可以共用1套油源。
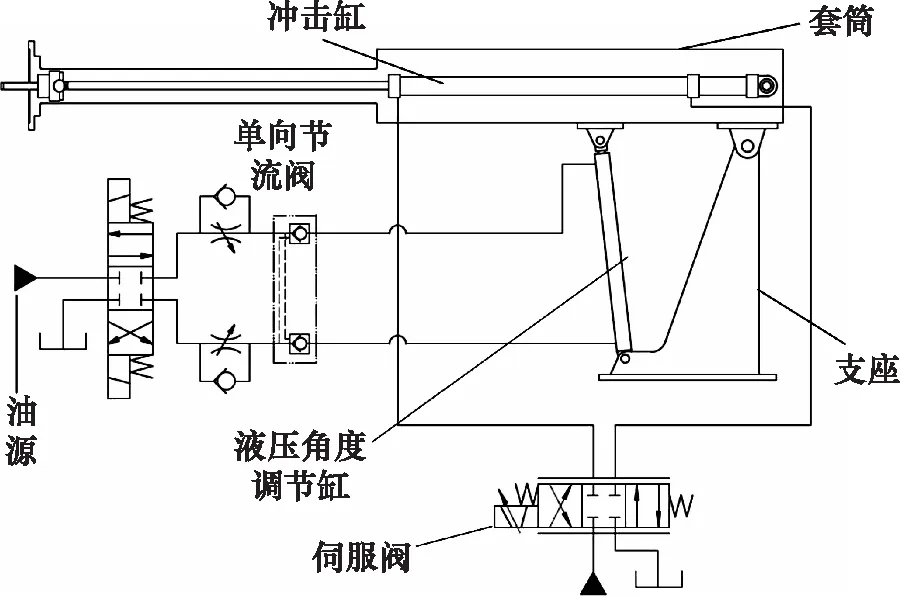
图1 液压冲击机构工作原理图
伺服阀控缸系统是实现液压能到冲击动能转换的核心动力单元,它包括伺服阀、冲击缸和冲击头3部分。其中伺服阀为大通径流量型控制阀,通过调节液压油的流量和流向来控制冲击缸的运动速度和方向;冲击缸为单出杆非对称缸,采用间歇密封形式和节流缓冲结构来实现高速冲击运动和末端缓冲减速运动;冲击头与冲击缸的活塞杆末端连接,作用在被试件上,产生冲击动能。
冲击缸的结构示意图如图2所示,它不仅能实现高速冲击运动,而且具有优异的末端缓冲性能,能够在极短的行程和时间内吸收巨大的冲击动能。为了最大限度减小运动摩擦力,冲击缸的活塞杆和缸筒之间没有密封圈,而是采取间隙密封[6]。活塞杆上靠近活塞的一端设计有一定长度的缓冲台阶,它配合节流缓冲口来实现末端机械缓冲效果,通过改变节流缓冲口内节流孔通径,可灵活调整期望的缓冲效果[7]。冲击缸内置磁致伸缩式位移传感器,提供活塞杆位移反馈信号。
冲击缸实现高速冲击过程如下:高压油通过无杆腔油口进入无杆腔,推动活塞杆高速伸出;在缓冲台阶到达节流缓冲口位置之前,节流缓冲口不起作用,有杆腔内油液通过有杆腔油口流出;当缓冲台阶到达节流缓冲口位置之后,节流缓冲口发挥作用,缓冲行程区域内油液通过节流缓冲口流出。

图2 冲击缸结构原理图
大流量伺服阀和冲击缸构成了典型的伺服阀控缸系统,它具有速度开环控制和位置闭环控制2种控制模式。速度开环控制用于实现高速冲击运动,通过控制伺服阀电流信号来调节冲击缸的运动速度;位置闭环控制用于实现慢速的伸出或缩回运动,用于精确调整起始冲击位置。
换向阀控缸系统包括电磁换向阀、单向节流阀、液控单向阀和液压缸4部分,用于调整套筒的俯仰角度。电磁换向阀为三位四通H机能,用于控制液压缸伸出或缩回,液压缸直接驱动套筒改变俯仰角度;单向节流阀有2套,分别用来调节液压缸伸出和缩回的速度;液控单向阀用于闭锁液压缸的两腔油液,当电磁换向阀处于中位时,液控单向阀控制油压为零,液压缸处于锁定状态,从而使套筒在冲击运动中的俯仰角度保持不变。
2 冲击模型分析
伺服阀控缸系统的动态特性直接决定了试验系统的高速冲击性能,在冲击过程中,其绝大部分供油来自蓄能器,因此系统的工作压力是动态变化的,这与常规的伺服阀控缸系统供油压力保持恒定是有区别的[8]。为了分析系统中各元件参数对于冲击性能的影响,从而实现参数优化,应首先建立高速冲击模型,即建立基于蓄能器供油的伺服阀控缸系统动态模型。基于蓄能器供油的伺服阀控缸系统原理图如图3所示。
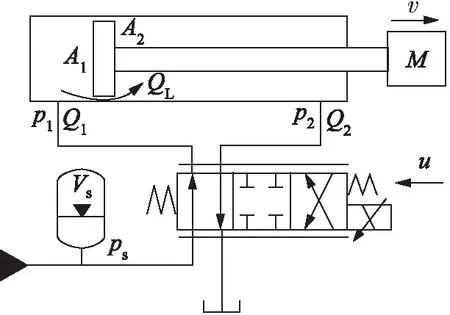
图3 基于蓄能器供油的伺服阀控缸系统原理图
系统中使用的伺服阀的工作频率较高,因此可以简化一个比例环节[9],即:
xv=Ksu
(1)
式中,Ks—— 伺服阀信号增益
u—— 伺服阀控制信号
xv—— 阀芯位移
在冲击过程中,高压油通过伺服阀进入冲击缸的无杆腔,设无杆腔的流量为Q1,压力为p1,伺服阀相应节流口的流量线性化方程为:
Q1=Kvxv+Kc(ps-p1)
(2)
式中,Kv和Kc分别为阀口的流量增益和压力流量增益,ps为供油压力。冲击缸有杆腔的油液通过伺服阀流回油箱,有杆腔的流量为Q2,压力为p2,设系统回油压力为0,则伺服阀相应节流口的流量线性化方程为:
Q2=Kvxv+Kcp2
(3)
设冲击缸的无杆腔和有杆腔有效面积分别为A1和A2,若忽略油液压缩量,仅考虑冲击缸的内泄漏量QL,则活塞杆的运动速度v可表示为:
(4)
冲击缸的内泄漏量是从高压的无杆腔泄漏到低压有杆腔的油液,设其正比例于两腔压力差,即:
QL=Ct(p1-p2)
(5)
式中,Ct为内泄漏系数。
根据式(1)~式(4)可以推导得到冲击缸两腔压差的表达式为:
(6)
式中,Ksv=KsKv为伺服阀总流量增益。由于冲击缸为间隙密封,可仅考虑惯性负载和阻尼负载,其受力平衡方程可表示为:
(7)
式中,M为包含活塞杆和冲击头在内的运动部件总质量;B为阻尼系数。
将式(1)~式(7)联立起来,可以得到:

(8)
上式为冲击速度的动态方程,它描绘了冲击速度v与供油压力ps和伺服阀控制量u之间的关系。根据式(8)可以得到稳态冲击速度的表达式为:
vs=[(A1Kc-(A1-A2)Ct)Kcps+
(9)
由式(9)可以看出冲击速度为一阶惯性环节,其时间常数Tv可表示为:
(10)
设蓄能器中的气体在冲击过程中迅速膨胀,冲击过程满足绝热方程,即:
(11)
式中,V0和p0分别为蓄能器的有效容积和预充气压力;Vs0和ps0分别为蓄能器冲液后的气体体积和气压;Vs和ps分别为冲击过程中蓄能器的气体容积和气压;r为气体的比热容;Ca为绝热常量。对式(11)进行线性化后可得:
(12)

(13)
设冲击行程为Lm,将式(13)和式(1)~式(7)联立,并经过拉氏变换后可得:
(14)
(15)
上式为供油压力的动态方程,它描绘供油压力ps与冲击速度v和伺服阀信号u之间的关系,等式右边的负号表明,供油压力ps随着冲击速度v和伺服阀信号u的增大而降低。Ka为压力-速度衰减系数,它表征了压力相对于冲击速度的衰减速率。
根据冲击速度和供油压力的动态方程,即式(7)和式(15),可以绘制出以伺服阀控制量为输入和以冲击速度为输出的系统方框图,如图4所示,它描绘了基于蓄能器供油的伺服阀控缸冲击系统的动态模型。

图4 基于蓄能器供油的伺服阀控缸系统结构方框图
从图4可以看出,基于蓄能器供油的伺服阀控缸系统与传动的伺服阀控缸系统在模型结构上存在较大的差异:它包含了1个前馈环节和1个反馈环节,开环为一阶惯性环节。
3 冲击特性分析
从图4所示的基于蓄能器供油的伺服阀控缸系统动态模型可以看出,冲击速度v由伺服阀控制信号u和供油压力ps共同确定,而供油压力ps受冲击速度v的反馈作用和伺服阀控制信号u的前馈作用,是一个动态变化的状态参数。因此,与供油压力恒定的伺服阀控缸系统相比,基于蓄能器供油的伺服阀控缸系统的动态特性更加复杂,它不仅取决于伺服阀和冲击缸的参数,而且与蓄能器的参数密切相关。
3.1 伺服阀控缸系统参数的影响分析
伺服阀控缸系统的结构参数和负载参数直接影响冲击性能,这包括无杆腔面积A1、冲击行程Lm、惯性负载M、伺服阀的流量增益Kv和压力流量增益Kc,此外,由于冲击缸采用间隙密封,缸筒的内泄漏以及阻尼力的影响也有必要进行分析。
首先讨论内泄漏量Ct对冲击特性的影响。忽略阻尼系数和有杆腔面积的影响,式(8)可以简化为:
(16)
根据式(16)可知,随着泄漏系数的增大,稳态冲击速度减小,考虑到Ct≤Kc,Ct对于稳态速度的影响非常有限;根据式(10)可知,随着泄漏系数的增大,冲击速度的时间常数Tv增大,冲击速度的响应变慢。总体来说,内泄漏量远小于进入无杆腔的流量,几乎不会对冲击过程造成显著影响,因此其作用可以忽略。
根据式(9)和式(10),阻尼系数B在理论上影响着冲击速度的时间常数和稳态速度。随着阻尼系数B的提高,冲击速度的时间常数增大,动态响应变慢,而稳态速度则有所降低。
根据式(8)和式(15),冲击缸的无杆腔面积A1直接影响了冲击速度和供油压力的动态过程。对冲击速度而言,随着的无杆腔面积A1增加,冲击速度的时间常数减小,响应加快,而稳态速度减小;对供油压力而言,随着的无杆腔面积A1增加,压力递减的变化率增大,即压力下降速率增大。
根据式(15),冲击行程Lm直接影响着供油压力的变化率,从而间接影响冲击速度的动态过程。具体来说,随着冲击行程Lm的增大,供油压力的下降速率增大,而冲击速度也随之降低。
根据式(9)和式(10),惯性负载M在理论上不影响冲击速度的稳态值,但是影响其时间常数,它们称线性比例关系。随着惯性负载M的增大,冲击速度的时间常数比例增大,动态响应过程变慢。
伺服阀的流量增益Kv和压力流量增益Kc也将直接影响冲击速度的动态响应和稳态值。具体来说,随着流量增益Kv和压力流量增益Kc的增大,冲击速度的稳态值增大,但是压力流量增益Kc的增大将使冲击速度的时间常数增大,响应过程变慢。
3.2 蓄能器参数的影响分析
蓄能器的基本参数主要包括有效容积V0、预充气压力p0和预冲液压力ps0,它们共同决定了压力-速度衰减系数Ka,从而影响了冲击过程中供油压力的下降速率。为了最大限度的提高冲击速度,期望供油压力相对于冲击速度的敏感度越低越好,即压力-速度衰减系数Ka尽可能小。
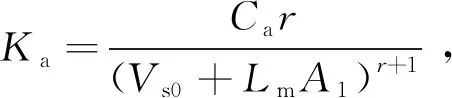
为了更加清晰的表征蓄能器有效容积V0、预充气压力p0和预冲液压力ps0与压力-速度衰减系数Ka的关系,需要对式(10)描绘Ka的进行形式上的变换。根据式(13)和式(10)可以得到:
(17)
式(17)表明,增大V0和p0,都能够有效减小Ka,由于p0的指数要小于V0的指数,理论上p0的影响效果要明显强于V0。ps0决定了供油压力变化的起始值,提高ps0能够直接有效的提高冲击速度的稳态值,增大ps0后,Ka随之增大,供油压力下降速率增大,冲击速度进入稳态后的衰减速率也增大。
4 实验研究
液压冲击原理样机的主体包含1个套筒和2套阀控缸系统。其中伺服阀控缸系统内置在套筒内,用于模拟质量体高速运动的冲击力,其主要元件参数如表1所示。
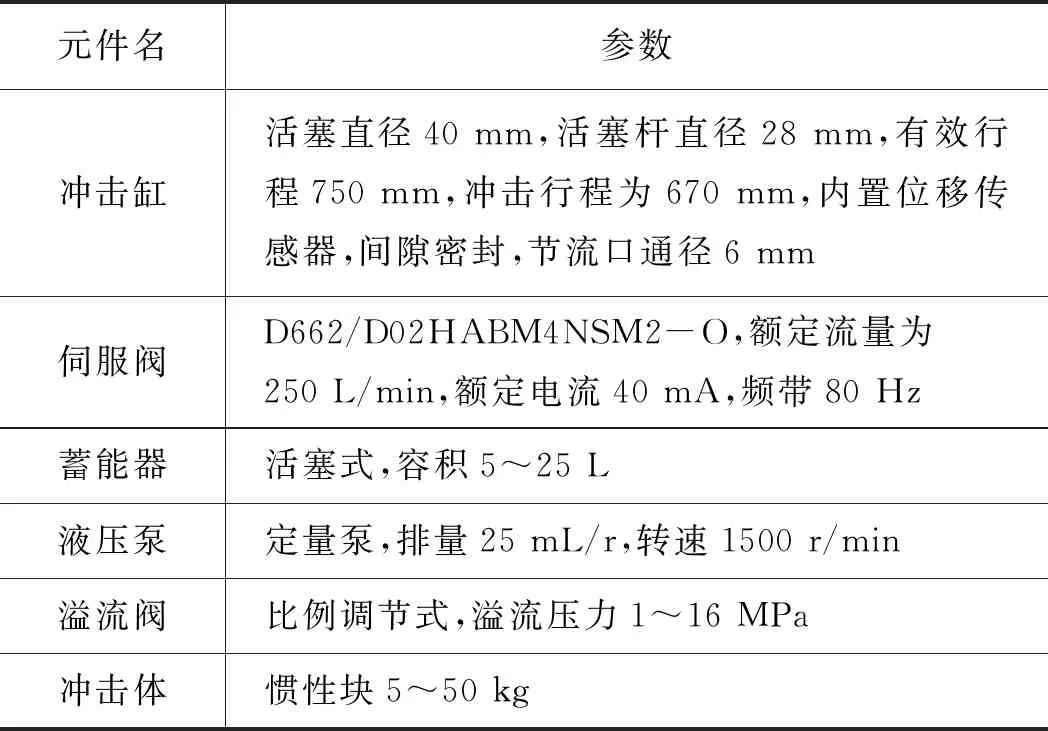
表1 液压冲击机构的主要元件参数
4.1 仿真实验
考虑到整个液压冲击原理样机在安装设置好之后,改变元件的参数不便,因此采用在AMESim软件中搭建仿真实验平台,进行仿真实验来验证伺服阀控缸参数和蓄能器参数的改变对高速冲击过程的影响。
分别设置惯性负载分别为10, 20, 30 kg,进行仿真实验,实验结果如图5、图6所示。从图中可以看出,惯性负载并不影响冲击速度的稳态值,但是影响动态响应过程,随着惯性负载增大,冲击速度的动态响应变慢;惯性负载的变化基本上不影响供油压力的变化过程。
改变伺服阀的电流,设置输入电流分别为30, 35, 40 mA,进行仿真实验,实验结果如图7、图8所示,可以看出,伺服阀电流与冲击速度的稳态值和供油压力的衰减速率基本上成正比例关系,伺服阀控制信号越大,冲击速度的稳态值越大,供油压力的衰减越快。因此,伺服阀电流能够精确调节冲击速度变化。

图5 不同惯性负载冲击试验冲击速度曲线
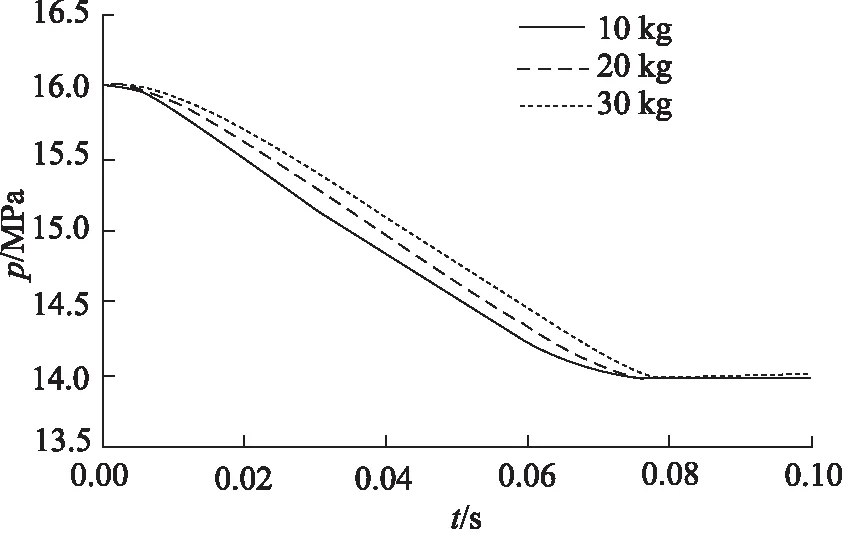
图6 不同惯性负载冲击试验供油压力曲线
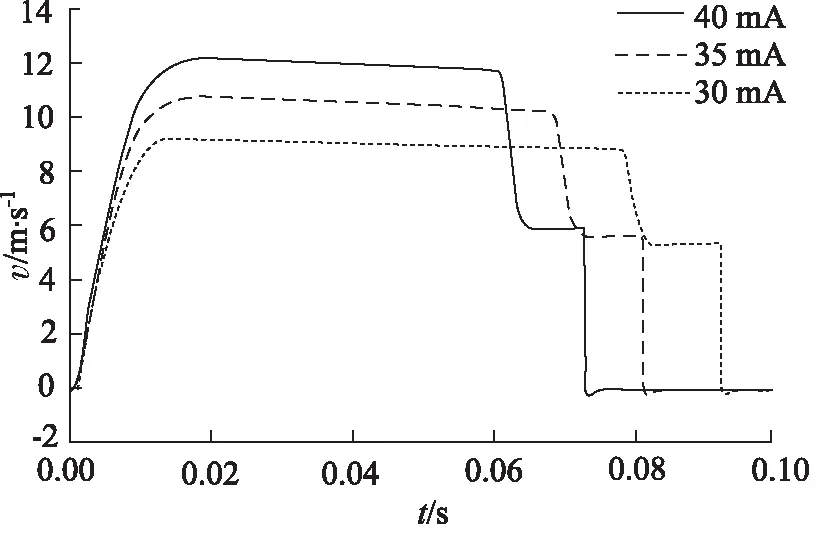
图7 不同伺服阀电流冲击试验冲击速度曲线图

图8 不同伺服阀电流冲击试验供油压力曲线图
设置蓄能器的有效容积分别为10, 15, 20 L,进行仿真实验,实验结果如图9、图10所示,可以看出,蓄能器有效容积对供油压力的衰减速率有较大的影响,有效容积越大,供油压力的衰减越慢,冲击速度到达稳态后的下降速率也越慢。
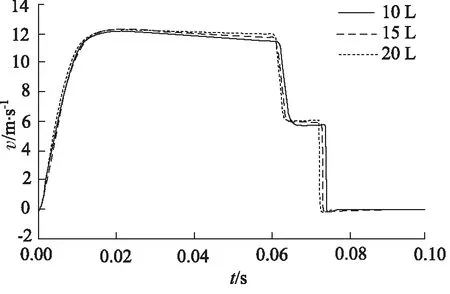
图9 蓄能器不同有效容积冲击试验冲击速度曲线
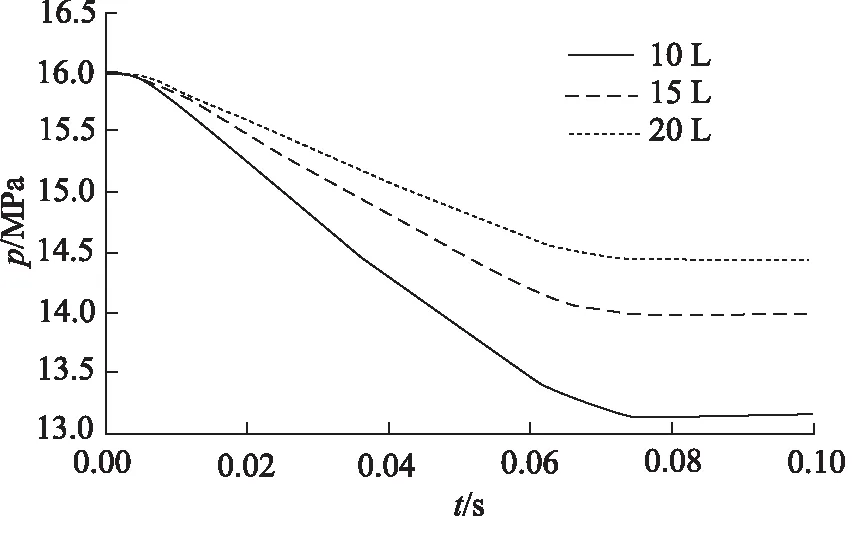
图10 蓄能器不同有效容积冲击试验供油压力曲线
设置蓄能器的预充气压力分别为4, 8, 12 MPa进行实验,实验结果如图11、图12所示。可以看出,蓄能器预冲气压力增大后,供油压力和稳态冲击速度的衰减速率均随之减小,但稳态冲击速度的变化并不显著,对供油压力的衰减速率影响较大。
设置供油压力分别为12, 14, 16 MPa进行实验,实验结果如图13、图14所示,可以看出,初始供油压力增大后,冲击速度的稳态值基本上等比例增大,因此,提高蓄能器冲液压力是提高冲击速度的有效方式之一。初始供油压力的增大也会使供油压力的衰减率减小,从而使稳态速度的衰减率减小。

图12 蓄能器不同充气压力冲击试验供油压力曲线

图13 不同供油压力冲击试验冲击速度曲线
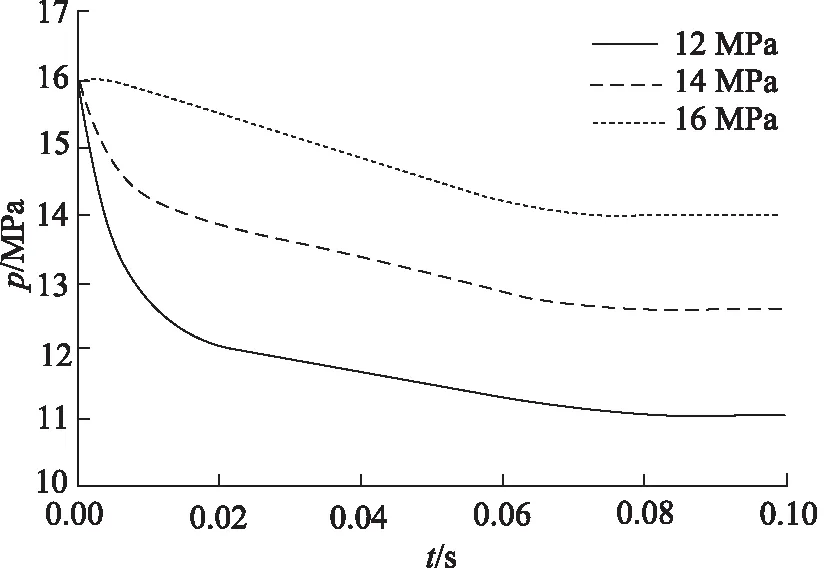
图14 不同供油压力冲击试验冲击速度曲线
设置节流口的开口大小分别为1.25, 1, 0.75 mm进行实验,实验结果如图15、图16所示,从图中可以看出,节流口开口越小,缓冲减速时间越长,残余速度越小,但开口过小,则可能产生震荡。节流口的开口大小对供油压力的变化基本没有影响。

图15 不同节流口开口大小冲击试验冲击速度曲线
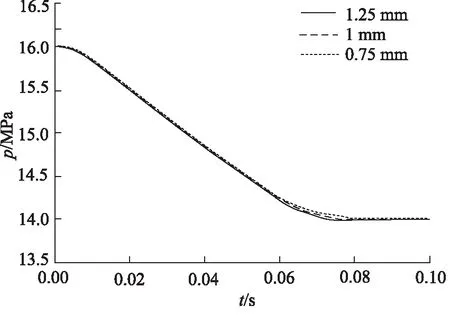
图16 不同节流口开口大小冲击试验冲击压力曲线
由以上试验结果可以看出,液压冲击过程很大程度上受到伺服阀电流和蓄能器工作参数的影响;加速段主要由惯性负载决定,惯性负载越小,加速时间越短;平稳段主要由伺服阀电流和供油压力决定,速度值与阀电流基本成线性关系;减速段特性由节流口决定,并存在速度振荡,节流口越小,缓冲减速时间越长,残余速度越小。
4.2 实物样机试验
液压高速冲击实物样机如图17所示,其惯性负载为10 kg,蓄能器有效容积为15 L,预充气压力为8 MPa,初始供油压力为16 MPa。伺服阀的控制信号设置为40 mA,即全部打开伺服阀,冲击速度、位移和供油压力的试验曲线如图18所示。可以看出,冲击过程实质为速度控制过程,可划分为加速段、平稳段和减速段。加速段持续了约18 ms,冲击速度迅速提高,最高达到了12.3 m/s;在平稳段,随着供油压力逐步降低,冲击速度也随之缓慢降低,在冲击行程末端,速度降低为11.9 m/s;进入减速段后,受到节流缓冲口影响,速度迅速降低,此时节流口开口大小设置并不是很小,因此基本不存在震荡,最终的残余速度为6 m/s。在整个冲击阶段,供油压力成线性规律从16 MPa降低为14 MPa,下降速率约为28.6 MPa/s。

图17 液压高速冲击实物样机
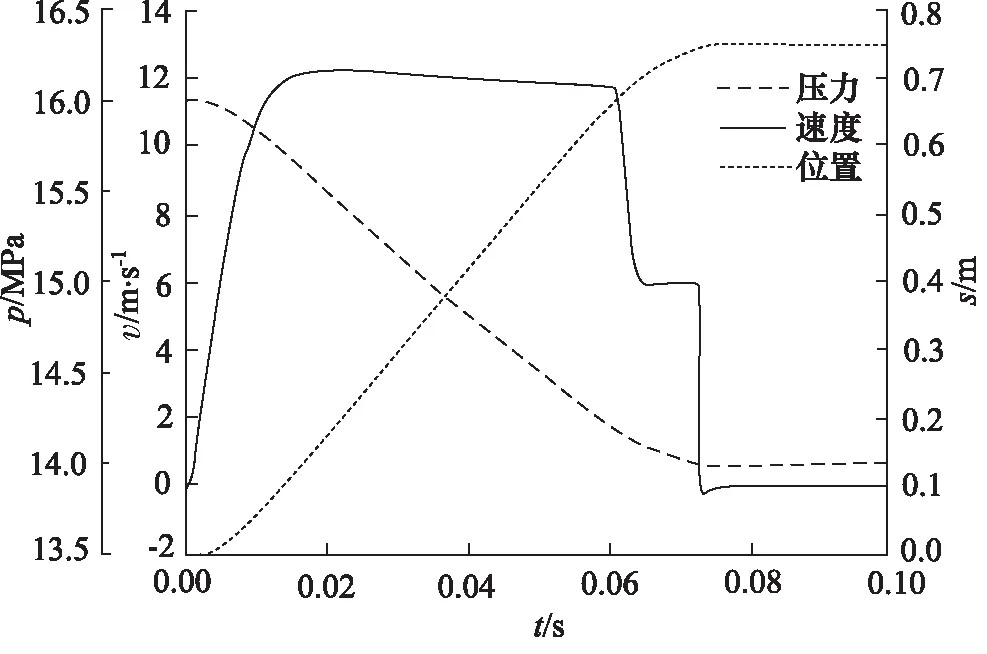
图18 冲击试验曲线图
5 结论
液压高速冲击试验系统采用高压蓄能器供油,它通过伺服阀控缸系统将液压能转换为冲击能,能够模拟冲击速度与加速度的动态变化过程,并且具有冲击角度调整功能。通过分析液压冲击机构的数学模型可知,冲击速度主要由伺服阀电流和供油压力共同确定,而供油压力受冲击速度的反馈作用和伺服阀电流的前馈作用,是一个动态变化的状态参数。因此,基于蓄能器供油的伺服阀控缸系统的动态特性更加复杂,它不仅取决于伺服阀和冲击缸的参数,而且与蓄能器的参数密切相关。
基于原理样机的试验结果表明:液压冲击试验系统是合理可行的,实现了最高12 m/s的高速冲击过程;液压冲击过程很大程度上受到伺服阀电流和蓄能器工作参数的影响,这也进一步验证了理论分析的正确性。
猜你喜欢
石油矿场机械(2022年5期)2022-10-25 12:27:02
天然气与石油(2020年6期)2021-01-04 07:57:24
山东化工(2019年12期)2019-07-05 08:44:26
中国卫生(2016年12期)2016-11-23 01:10:08
湖北农机化(2014年1期)2014-12-29 00:42:50
航运交易公报(2014年10期)2014-04-02 01:23:28
航运交易公报(2014年10期)2014-04-02 01:22:53
中国新技术新产品(2013年6期)2013-05-12 09:39:26
河北农机(2012年4期)2012-08-15 00:46:00
中国海上油气(2010年5期)2010-09-08 05:58:34
