
空间平行机器与平行制造*
2019-09-16 09:19:30商秀芹白天翔董西松宋晓光王飞跃
空间控制技术与应用 2019年4期
沈 震,罗 璨,商秀芹,5,白天翔,3,董西松,宋晓光,熊 刚,5,王飞跃
0 引 言
人类目前的活动空间主要局限在地球表面以及近地轨道空间, 随着人类活动疆域的进一步拓展, 星际航行以及行星际殖民将成为一个关于太空研究的主要发展方向. 而空间技术不断发展,研究和开发太空资源成为国家间合作与竞争的着力点, 也是人类文明发展的一个重要方向. 国际空间站将会延续到2024年, SpaceX的空间站也将逐渐成型,俄罗斯也有意发射下一代空间站, 特别是中国也将于2020年开始部署自己的空间站. 可以预见, 未来空间站的建立、维修、回收、释放卫星等工作将会越来越多, 对于空间机器人的需求越来越强烈. 更进一步,星际航行和星际殖民的一个重要基础是航天器本身要有自我循环和自我生产能力. 建立“太空工厂”, 实现“太空制造”, 是航天器具备在轨“自持力”的重要途径.
空间机器人(Space Robots)是用于代替人类在太空中进行科学试验、出舱操作、空间探测等活动的特种机器人[1]. 空间机器人主要由空间机器人基体及搭载在基体上的机械臂组成, 可以在太空中完成各种任务作业[2]. 空间机械臂更加局限, 是被空间机器人包含的概念, 单指在太空的环境下关节连杆结构的操纵机器人. 相比于空间机器人, 空间机器是更为广泛的概念, 泛指在太空的环境下所有通过驱动器和机械结构组成的工具. 空间机器人可以代替宇航员从事空间装配、空间维修、空间实验、空间制造等作业[2]. 空间机器人分为地表探测移动机器人、大型机械手、舱内机人和制造机器人等类别[3].
空间机器人的控制面临的主要挑战在于自由漂浮空间[4]带来的运动耦合性, 因此相对于地球上固定在基座的机器有许多特有的新特点[2]. 机器自身质量与转动惯量对机器的末端位置运动也会产生影响. 空间环境中的背景辐射和昼夜温差也对机器的稳定性提出考验. 另外, 能耗与遥控通信延迟也往往制约空间机器人的应用.
机器是制造的基础. 太空制造在回收空间废弃航天器的同时, 根据需要“制造”新航天器, 从而实现一定程度的“在轨物资循环”, 为长时间的星际航行奠定技术基础.太空制造往往依赖于增材制造(3D打印), 以便满足灵活性的要求. 太空制造不但面临地面制造系统的一般问题, 还面临和空间机器人面临类似的问题, 对于智能、自主的需求更加强烈. 可以说, 空间制造系统处于不确定性环境中, 是一个典型的复杂系统[5].
复杂系统的研究, 或对本质上复杂性的科学问题的研究, 往往不满足科学上“可实验”、“可重复实验结果”这两个要求. 综合以上两方面, 通常对复杂系统只能进行离线、经验性、粗粒度分析,难以满足精度、实时性要求. 这是由于对复杂系统的求解空间停留在实际系统本身所处的物理空间, 对复杂系统的求解方法也停留在解析方法上.复杂系统面临的问题定义为不确定性(Uncertainty)、多样性(Diversity)和复杂性(Complexity), 简称UDC问题[5].
1994年, 平行系统(Parallel Systems)的构想在智能系统的基础上开始萌芽[6]. 为了实现实际系统的智能控制, 王飞跃研究员提出嵌入式协同仿真方法, 将协同仿真(Co-Simulation)嵌入到实际系统中, 并将其命名为影子系统(Shadow Systems). 2004年王飞跃研究员针对UDC问题, 正式提出人工系统、计算实验、平行执行相结合的Artificial Systems-Computational、Experiments-Parallel、Execution(ACP)方法[7]. 基于ACP的平行系统方法,必须拓展复杂问题的求解空间, 在虚实互动的空间中寻求新的求解方法.
在2014年, 王飞跃研究员在报告[8]中第一次将ACP平行系统理论与机器人学结合, 提出平行机器概念. 平行机器是物理机器、软件定义的机器、物联网、知识图谱以及其他广义的人工智能技术相结合而成的机器控制与管理系统[9-10]. 在2014年, 王飞跃研究员提出智能制造的一种新范式——平行制造, 将社会物理信息系统(Cyber-Physical-Social System, CPSS)的概念, 综合物理系统、信息系统和社会系统的复杂性, 以ACP方法为理论指导, 结合工业智联网技术、软件定义技术和知识自动化技术, 构建平行演化、闭环反馈、协同优化的智能制造体系[8,11]. 本论文将平行机器和平行制造与空间机器、太空制造相结合, 提出“空间平行机器”和“空间平行制造”的概念, 用平行系统理论解决在太空中的机器、制造系统的控制与管理问题.
本论文下面将对研究现状进行介绍, 之后阐述空间平行机器和空间平行制造, 分析其方法和应用场景、能够解决的问题, 最后总结全文.
1 空间机器和空间制造技术研究现状
在国外对空间机器人进行研究开发的国家和机构主要有美国、欧空局、日本等, 这些国家和机构都已经具有在轨服务的机械手, 完成了一系列空间操作. 世界上第一个成功应用于飞行器的空间机器人为加拿大MD Robotic公司于1981年研制的SRMS系统[12], 如图1所示.它拥有6个自由度,其臂长15.2 m,质量415 kg,用于捕获目标,回收卫星,系统维修等任务, 目前已经完成的任务包括哈勃望远镜的维修, ISS在轨服务等60多项任务[13-15].
从20世纪80年代初, 美国就开展了对空间机器研究技术. 其中比较著名的有FTS (Flight Telerobotic Servicer), Robonaut, 轨道快车(Oribital Express, OE)计划, RTSX(Ranger Telerobotic Shuttle Experiment)计划和RRM(Robotic Refueling Mission)计划等[16-17]. 近年来NASA 提出了通过地面或在轨人员遥操作, 控制空间机器人进行燃料重复加注试验验证任务[14]. 欧空局各国在空间机器人的研究方面投入很大而且进展也很快, 成立了一些空间机器人研究机构专门从事机器的研究工作, 如荷兰的FOKKER SPACE & SYSTEM 公司等. 德国于1993年4月发射升空的 Rotex 空间机器人是世界上第一个远距离遥控空间机器人. 德国研制的空间机械臂Rokviss于2004年12月由俄罗斯运载火箭搭载发射上天,并于2005年1月安装在了国际空间站俄罗斯服务舱上, 如图2所示[18-19].

图1 加拿大SRMS系统空间机器人[12]Fig.1 Canadian SRMS system robot[12]

图2 德国的遥控空间机器人Rotex和Rokviss系统[18-19]Fig.2 German remote space machine Rotex and Rokviss system[18-19]
空间机器人可以代替人类从事星球表面探测,空间装配和维修以及空间实验等作业任务[4]. 例如: 卫星的释放和回收、空间站的维修以及飞行器燃料的加注等[20]. 近年来, 对于空间机器人的科学研究实验主要集中于空间机器人对于空间碎片任务的改进, 空间机器人的任务抓取以及姿态管控等多个领域.
2017年, ZHAO等提出并验证了对于系留空间捕获系统的控制方案可以避免正常滑模控制的抖振, 并且对于未知边界扰动具有鲁棒性[21]. 2017年, HUANG等提出了一种新的地球静止轨道空间碎片清除系统, 称为灵巧系留空间机器人, 并且进行了广泛的模拟和地面半实物实验, 验证了这是一种有效去除空间碎片的可行解决方案[22]. 2017年, HUANG等提出了一种仅使用卫星支架边缘线的空间机器人的单目视觉伺服控制方法, 实验表明该算法能够稳定地提取边缘线, 并调整机器的姿态以满足抓取要求[23]. 2017年, LU等针对空间机器人设计了一种具有双闭环的快速终端滑模控制方法, 用于灵活组合姿态接管控制, 仿真研究证明了所提出的控制器与传统滑动模式控制的有效性[24]. 2017年, ZHANG等提出了一种改进的自适应滑模控制算法, 用于降低目标的未知角动量, 采用新的符号函数和时延估计,保证快速收敛,实现良好的性能,抖振效果小[25].
国内于上世纪90年代开始开展空间机器技术研究. 国内多家科研单位对空间机器开展了大量研究, 取得了较多成果. 对于空间站建造与运营、月球探测、活性探测等工程科研任务要求, 我国自行研制了多套空间机器系统, 其中部分产品已实现了空间应用.
虽然关于空间机器已经有长时间的研究, 但是当前的研究主要集中于某一方面的具体任务的解决, 对于智能、自主等关注较少. 实际上, 早在1948年,图灵在其论文《Intelligent Machinenary》中提出“智能机器”的概念, 并且引入了人工智能的相关概念, 和遗传算法, 神经网络, 强化学习的思想. 近年来, 人工智能发展迅速,其研究涵盖了认知与推理(包含各种物理常识和社会常识)、计算机视觉、自然语言理解与交互(包含听觉)、机器学习等广泛的学科领域, 目的是让机器能够像人一样理解、思考和学习[26-27]. 2014年王飞跃研究员提出“平行机器”的概念, 人工系统是根据基于观察和知识的物理世界而生成, 进行计算实验以收集动作状态样本, 以平行执行的方式制定一系列解决方案并在线优化参数, 最终完成任务并达到期望的性能, 探索在复杂环境中管理机器并指导其完成任务的系统性方法[9-10].
机器是制造的基础, 随着空间技术的发展, 太空制造的重要性越来越大. 随着人类对太空研究的深入, 航天器的应用呈现的特点有航天器的种类和数量呈爆发式增长,对航天器的寿命和可靠度的要求越来越高和随着航天器功能性能的提高,航天器的造价居高不下等特点.与上述发展趋势相对应的,是航天器故障仍旧较高的故障率以及航天器故障后造成的巨大损失.如何在高密度的发射形势下,尽量降低卫星的研发和使用成本,延长卫星在轨使用寿命是国内航天产业面临的新课题.更进一步, 未来的深空探索对于太空制造有强烈需求. 建立“太空工厂”, 是航天器具备在轨“自持力”的重要途径.
3D打印技术是太空制造中一种重要的制造方式. 3D打印技术是一种采用逐层堆积直接进行零件成形的数字化增材制造工艺, 与传统减材或等材制造相比, 3D打印技术消除了加工过程对中间模具的需求, 能够进行快速需求响应, 具有单件小批量定制化快速制造的优势, 在太空中, 只要能够携带或者获取原材料, 就可以在空间直接制造失效零部件、备件和工具, 可以空间紧急维修及废物回收利用,可以推进深入研究载人深空探索. 该技术的研究将会推进未来太空居住地结构的开发、太空环境中零件的制造、航天零件的修复与替换以及生命支持或工作人员使用的设备等[28]. NASA兰利研究中心围绕金属零件的空间3D打印开展了研究, 开发了一套适用于空间飞行的轻型电子束熔丝沉积成形设备, 并通过两次微重力飞行试验验证了0 g条件下进行电子束熔丝沉积工艺的可行性,如图3和图4. 2014年, NASA在国际空间站的微重力科学手套箱(MSG)中进行了首次空间3D打印, 并在空间站制造了约20个结构样件, 对空间3D打印的可行性进行了充分的分析和验证, 证明了空间3D打印的可行性[29]. 2016年, 国际空间站上的一款名为“增材制造设备”(Additive Manufacturing Facility, AMF)的3D打印机, 打印出了第一个工具——扳手, 可用于宇航员对轨道实验室进行维护工作[30-31], 如图5.
太空制造技术是现阶段国内和国际的研究热点, 专利[32]将3D打印运用在航空航天领域, 提供了与地球相似的打印环境, 对于太空环境中的3D打印研究具有重要意义. 专利[33-34]通过设置胶水喷头和增压喷头, 解决了微重力环境下的3D打印问题. 2016年, 中国科学院空间应用工程与技术中心研制出了太空增材制造样机, 而且利用抛物线飞机成功完成了国内首次增材制造技术微重力环境验证试验[35].

图3 适用于飞行测试的轻型电子束熔丝成形系统[29-30]Fig.3 The electron beam freeform fabrication system for fight test[29-30]
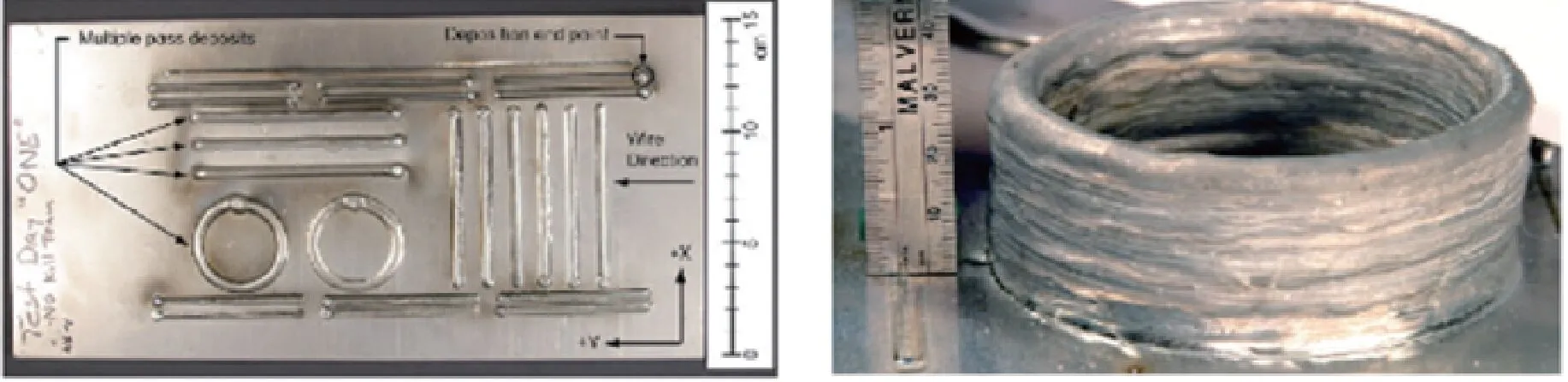
图4 电子束熔丝成形试样样件[29-30]Fig.4 Samples by the electron beam freeform fabrication[29-30]
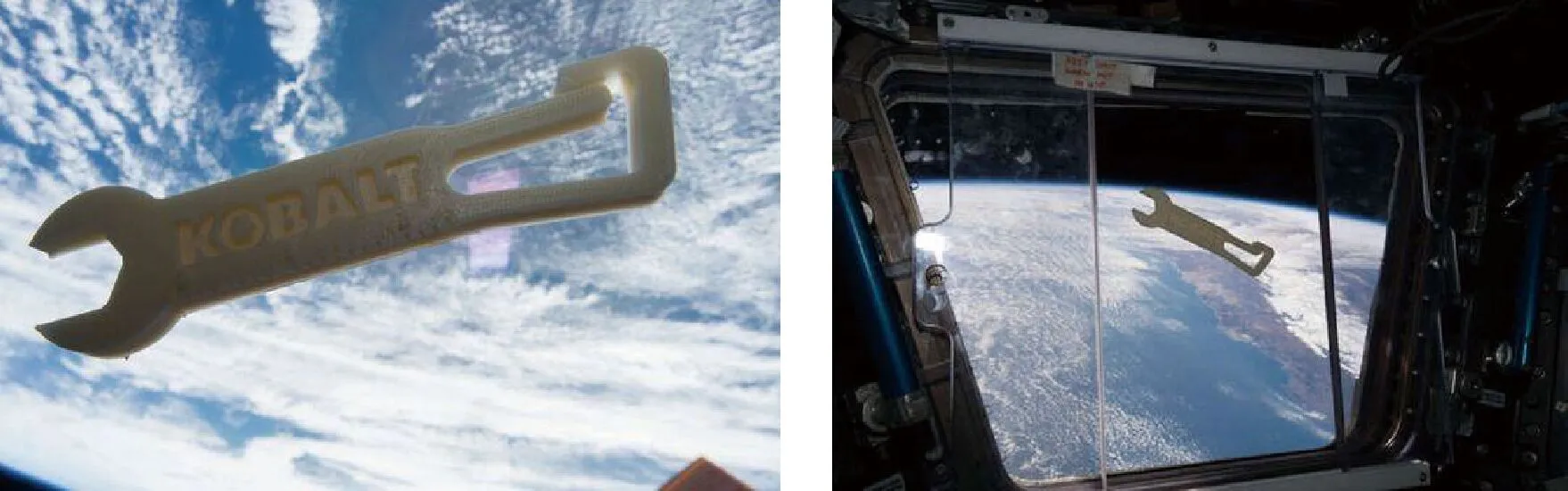
图5 国际空间站的3D打印机打印出第一个工具-扳手[31]Fig.5 The First Tool Printed by 3D Printer in the International Space Station-Wrench[31]
目前正以德国工业4.0和美国工业互联网为代表, 各国纷纷进军工业智能化领域. 上述提到的机器技术, 再加上3D打印、人工智能、机器学习等技术的普及为制造业的发展注入了新的活力[36]. 智能制造是可持续发展的新型制造模式,通过结合计算机建模仿真和信息通信技术的巨大潜力,可以达到优化产品的设计和制造过程的效果,大幅度减少物质资源和能源的消耗以及提高制造效率和质量.
数字化双胞胎技术是一项新兴技术, 在工业生产、智能制造等多个领域有着广泛的应用前景.这项技术最早由美国国防部提出, 主要用于航空航天飞行器的健康维护与保障. 前提是在数字空间建立真实飞行器的模型, 然后通过传感器完全同步与飞行器真实状态.根据现有情况和过往载荷,可以做到及时分析评估是否需要维修, 能否承受下次的任务载荷等. 2017年,GREVIES等提出了数字化双胞胎的障碍和机遇,例如系统的复制等,并且利用数字化双胞胎完成了NASA项目的近期工作[37].2018年,SHEN等研究了数字四胞胎应用于无人机的场景,通过虚实互动, 可以使四胞胎的四部分在滚动优化中不断优化, 从而实现复杂环境中的算法优化和控制执行[38]. 2019年, LIU等讨论了数字四胞胎系统结合平行驾驶在矿山、物流等场景中的应用实例[39].
平行制造作为一种新型的智能制造的体系, 在社会物理信息系统工业环境下, 可以利用工业智联网, 借助虚实系统的平行演化及闭环反馈, 协同优化管理系统内部流程执行、生产制造以及资源调度, 实现实时化、个性化、大规模的“灵敏” 移动 “智造”[8]. 平行制造有“本地简单, 远程复杂”的特点,即可以先在远程将复杂的任务进行设计和计算, 然后将结果发送到应用现场,可以弥补传送时间延时导致的操作不便等问题.平行制造的这个特点合适应用在对于人造卫星上生产设备的维修制造,以及用于月球, 火星上太空生产制造等场景.
2 空间平行机器
2.1 “本地简单, 远程复杂”控制思想及实现
随着控制理论的发展,现有的控制算法实现越来越依靠强大的计算系统的支持,而机器学习等人工智能算法除了强大的计算能力外还需要较大的存储空间.由于空间飞行器负荷和能源的限制,其计算能力和存储空间有限,因此可以采用“本地简单,远程复杂”的基本设计思想,这也是平行控制思想的具体实现.
这种思想的优点就是较高的性能价格比,在实现智能优化控制的前提下,大大降低空间平行机器和平行制造的控制成本.也就是说,将复杂的计算设备和存储设备安排到地球端的计算设备和存储设备上完成,而在空间站采用简单实现的控制器.地球端的计算设备可从当地存储设备收集数据进行学习优化,进行各种与控制算法相关的复杂的建模、学习、优化过程,充分利用其丰富的计算资源对各种信息进行有效和复杂的分析.在学习完成后,在将控制参数发送到空间站的控制器实现智能优化控制.总之,“远程复杂”原则之下,可以解决许多由于空间站本地控制器本身资源(比如存贮空间和计算能力等)限制而产生的经济性或技术性控制难题.
2.2 空间平行机器的含义与应用
文献[40]定义了平行机器框架,见图6, 其中,物理形态的机器与软件形态的机器在物理空间、社会空间和网络空间分别联通,构建出机器学习与培训、机器实验与评估和机器管理与控制3个主要功能.
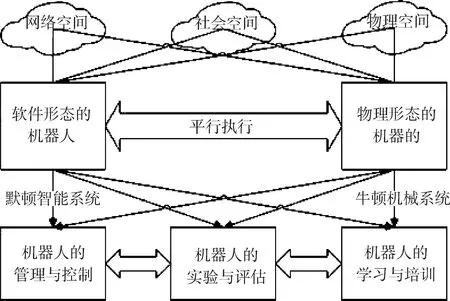
图6 平行机器基本框架Fig.6 Framework of parallel machine
可以认为,软件定义的机器是实际物理机器的“活”的本体知识描述[41]、可视化的信息中,它可以放在本地, 也可以迁移到云端, 又可以下载到终端, 是机器的具体化、个性化和专门化的体现. 赋予软件定义的机器这样的迁移性, 是为了我们可以实现“本地简单、远程复杂”的系统构成, 也是这个特点使得平行机器框架适用于空间机器.
空间平行机器是结合平行机器和空间机器的概念, 应用场景在太空中的平行机器系统. 空间机器面临的首要问题是不确定性.不确定性来源于主观测量和建模的不精确性、外部扰动的不确定性以及空间漂浮环境中的各种反作用力等,我们实际上无法得到机器系统的精确、完整模型[42-43].空间机器面临的第二个问题是信号问题, 从信号采集到返回地面控制台往往需要几十毫秒到几秒的时间, 高延时使得我们不可能通过遥控解决所有复杂操作问题,必须通过自动化. 空间机器面临的第三个问题是能源问题, 在空间中工作的机器的功率有限, 这不仅包括执行功率还包括计算和通信功率, 因而我们必须要优化控制的总能耗.
为应对以上问题, 我们需要一种数据驱动的方法, 使空间机器可以在运行中不断更新和优化控制,这便是空间平行机器的平行学习[44]方法.使用平行学习方法, 我们将传统控制循环中的状态、观测与控制过程转变为描述、预测、引导的迭代过程.
描述步骤是为机器建立获取当前系统状态的方法.这个步骤被称为“描述”,因为所获得的模型应该能够描述机器系统的完整模式及其工作场景.在实践中,机器和环境的描述模型在整个生命周期中都是有效的.然而,由于参数快速变化和一些未建模的环境动力学因素,准确的描述模型只能维持很短的时间.因此,我们应该使数据驱动模型适应最新收集的数据样本分布.这是描述学习中的自我进化过程.
预测步骤是计算机对于外部控制与扰动的短期响应的步骤. 在实践中, 我们难以获取可以对系统响应预测的长期可靠的模型, 然而我们可以比较容易获得一个模型来预测机器和环境的短期状态. 这样就可以缓解漂移和偏置问题. 为了更好地理解机器的工作场景, 我们应该考虑环境的多模态, 并处理未建模的随机干扰.
引导步骤是获取鲁棒的短期控制方法的步骤.引导是将系统闭环的一步. 在这一步中, 我们基于预测数据优化得到引导策略, 以保证机器即使遇到各种不同的意外情况也能实现目标. 换句话说,在遇到多模态情况时, 引导步骤决定高级策略, 而不仅是像普通控制器在任何时刻直接计算出控制信号. 基于高级策略制定底层策略, 在此基础上推导出低阶控制指令, 以实现策略优.
针对以上三步, 我们需要描述学习、预测学习、引导学习三个数据驱动的学习过程. 在构建平行空间机器的过程中, 我们需要从物理实验与仿真实验两个方向入手. 为搭建软件定义的空间机器, 我们首先要构建物理实验的空间机器. 对于物理实验, 我们需要模拟失重环境, 一般采用基于自由落体的实验系统、基于抛物线飞行的实验系统、气浮式、水浮式系统等,详见[45],这里不再赘述. 但是, 这些系统的实验过程繁琐、昂贵,因而还需要一种仿真系统以进行大量计算实验.
使用仿真方法试验机器算法已是非常热门的技术. 仿真是机器设计、测试和评估中最重要的方面之一, 数学评估工具和仿真工具的使用在机器研究中起着至关重要的作用. 特别是随着机器学习技术的兴起, 仿真不仅可以保证安全运行,也可以极大提升探索和学习效率. 目前, 机器仿真器可划分为3类, 即计算仿真器、专用仿真器和通用仿真器, 每一类分别起到不同的作用.
对于空间机器, 计算仿真器可针对动态系统进行初步评估, 特别是用于数学建模和设计合适的系统, 例如 Matlab/Simulink, 它支持用于动态系统建模和分析的图形化编程环境, 通过其与物理控制器或其他仿真软件的接口, 可以方便进行控制器设计调参. 对于专业仿真器, 其系统设计往往考虑领域知识并创建专门的物理环境, 用以模拟机器在真实环境中运行时各个方面的整体性能. 一些飞行软件, 如X-Plane[46], FlightGear[47]等, 可以为空间机器提供良好的空间力学分析功能. 对于通用仿真器, 用户可以构建丰富的交互环境, 从而实验空间机器在更复杂的环境中的控制策略, 例如基于Gazebo[48]仿真器, DARPA开发了DRCSim[49]仿真系统, 并举办了DARPA挑战赛, 用以测试不同型号机器在太空环境中执行多种任务的能力.
另一方面,基于现有仿真器,为了使仿真环境以及其中的机器能够与现实中的物理机器更加贴切, 我们需要联动物理实验平台与仿真系统, 通过数据驱动的学习方法建立系统描述, 这便是描述学习.
当构建了高保真的人工系统, 我们可以基于此产生运行过程大数据, 将此数据与少量运行实测数据相结合, 我们便可以基于此预测系统对于输入的响应, 此过程即为预测学习.
随着我们可以产生输出-输入响应的精准预测, 我们可以采用强化学习方法, 或最优控制方法求取对于期望响应的数值解. 在此基础上,构建多模态控制策略, 对策略优化便可得到我们期望的控制方法, 这便是引导学习.
3 空间平行制造
3.1 空间平行制造的含义与应用
在应用ACP方法解决实际问题时, 其步骤为: 第一步, 建立与实际系统相对应的人工系统,可视为传统数学解析方法建模的扩展, 是广义的知识模型, 是落实灵捷性(Agility)的基础. 第二步, 在人工系统中利用计算实验对所研究复杂问题进行分析与评估, 可视为仿真模拟的升华, 是在人工系统中通过计算推演得到复杂系统特性的手段, 确保复杂系统能够聚焦(Focus). 第三步,实际系统与人工系统通过虚实互动的平行执行方式实现二者的管理与控制. 平行执行是自适应控制等思想的推广, 在虚实平行系统中构成大闭环反馈机确保执行结果收敛(Convergence)[50-51], 如图7. 由此三步,我们可以说将复杂系统的UDC复杂问题转化为ACP问题. 平行系统的思想与方法已经在智能交通、军事体系、以及社会制造等多个领域得以研究和应用.
图7 ACP方法Fig.7 ACP Method
为了深入研究制造业中社会系统、物理系统与信息系统之间的交互作用, 将工业4.0中的CPS进一步发展, 充分融合工业与人类社会, 形成了更为复杂的社会物理信息系统CPSS(如图8所示)[52-53].对于生产生活中复杂系统,一般的控制方法和仿真不能解决实际的系统问题,所以需要构建虚拟人工系统,与实际系统构成平行系统,进行虚实互动的平行执行,来实现实际系统的引导智能.
空间平行制造是基于平行智能理论的太空制造技术, 也是一个物理实际系统和虚拟系统交互的智能联网系统. 其中融合了社会物理信息系统CPSS思想, ACP方法与知识自动化技术, 将空间机器,空间工业需求与设计人员及制造单位统一在同一个框架内. 该系统在空间站或者卫星行星表面的应用平台上建立数字化的生产制造系统, 并且贯穿整个设备生产的生命周期, 包括检测、标记、立项、设计、生产、应用、反馈检测等环节.
平行太空制造的基本框架由实际制造系统与软件定义的虚拟制造系统所支撑, 通过两者平行互动实现管理与控制、设计与生产、检测与反馈等基本的运行模式. 图9是空间平行机器和平行制造的整体结构图.

图8 CPS与CPSSFig.8 CPS and CPSS
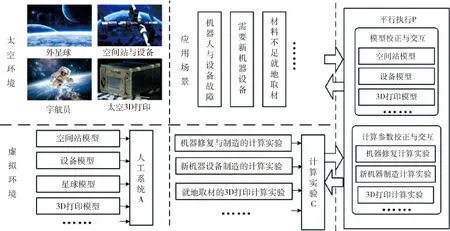
图9 空间平行机器和平行制造的整体结构图Fig.9 Structure for space parallel machine and parallel manufacturing
对空间平行制造的智能化体现在以下方面:
1)对太空制造以及所处太空复杂工作环境的描述与建模体现了空间平行制造的描述智能.
2)基于虚拟模型实现空间平行制造的故障检测, 设备模型设计, 计划生产, 应用反馈等任务展开具备可控性、可观性、可重复性的计算实验, 分析并优化其制造性能表现, 这体现了平行太空制造的的预测智能.
3)通过实际制造系统与虚拟制造系统间的平行执行, 通过虚拟系统模拟出修复或者生产空间零件设备的策略, 引导实际制造系统沿着该方案运行, 进行生产制造零件或者设备, 提高生产制造的稳定性和可执行性, 从而以一种科学计算的方式达到平行太空制造系统管理与控制的目的, 这对应于引导智能的特性.
3.2 空间平行增材制造
太空3D打印又被称为太空增材制造技术, 是太空制造的一个主要分支. 相比于模具制造,3D打印大大简化了其生产流程和周期. 由于地球上的重力作用, 在进行3D打印成品时, 同时需要打印出支撑成品的支撑结构, 最后这些支撑必须被摘除或融化, 从而增加了3D打印的时间成品和工作负担. 而在近地轨道, 低重力环境中可以直接打印3D物体, 不依赖于支撑或者较少依赖支撑. 空间平行增材制造是以CPSS、ACP方法、知识自动化技术和3D打印技术为基础的应用于太空环境的智能制造技术, 可以实现空间站或者卫星行星表面的零件补给, 修复以及设备的生产等任务.从而使得不再使用或者减少备件的准备, 仅仅携带3D打印机和原材料即可.
由于空间遥控和信号信息传输的延时性, 更加增加了空间平行增材制造系统在本身复杂结构的基础上的难控制性和操作性, 所以传统的数学模型仿真方法很难应用. 因此针对空间平行增材制造的描述过程, 人工系统建模的方法较为合适. 除了对3D打印系统建模, 还需要对工作环境和在空间的生产需求进行智能体建模.
空间平行增材制造系统包括实际系统、 软件定义的系统以及知识服务系统. 知识服务系统伴随3D打印成品的研发、设计、生成制造全过程, 在数据库中维护对应3D打印成品的数字模型, 用于之后再一次需要时快速生成需求的3D打印成品模型.
通过在虚拟环境中进行描述、预测、引导滚 动优化, 得到该任务的优化可行解, 并将行为策略以及控制算法下载到实际3D打印系统中. 由此, 在实际系统中执行观测、估计、建模、预测、设计、生产、应用、观测的循环, 控制3D打印系统完成既定任务; 在虚拟3D打印系统中执行检测、描述、计算实验预测、引导、执行的循环,再结合与控制参数调优. 由此可得, 整个虚实系统与知识系统紧密结合, 接受其数据服务以及计算服务等[36].
对于目前面临的空间站零件修复或者补给的问题, 首先, 通过软件定义的空间3D打印确定其描述智能, 构建空间3D打印的人工虚拟系统;基于人工系统, 实现情报分析、生产计划优化与智能预测的计算实验优化, 建立预测智能;最后, 通过空间3D打印的人工系统与实际系统构建的平行系统, 进行虚实互动的平行执行, 实现系统的引导智能, 打印出需要补给或者修复的空间3D零件或者设备.
对于未来太空设备和建筑等的生产需求, 太空建筑物的生产需求在CPSS的基础上, 太空平行3D打印利用工业智联网, 借助虚实系统的平行演化及闭环反馈, 协同优化管理系统内部流程执行、生产制造以及资源调度.并且借助物联网、互联网、移动互联网的无缝连接,人类在未来也可以表达太空机器、建筑的生产需求,满足大规模、个性化的应用需求.
4 结论与展望
近年来,太空技术与应用大踏步发展, 登陆火星已经提上日程. 人类未来肯定不止局限于地球,太空是远远更为广阔的活动空间. 在太空中将需要更多的机器, 以及依赖于机器的制造系统. 本文将平行机器、平行制造等和空间技术相结合, 为智能、自主的机器和制造系统提供可能的解决方案和途径, 以应对太空中的不确定性和意外情况. 尤其是空间平行增材制造, 能够智能地解决太空中补给和维修困难. 在将来, 随着信息技术和制造技术的深度融合, 空间平行机器和平行制造将有越来越大的应用空间.
猜你喜欢
环球时报(2022-07-13)2022-07-13 17:18:39
新高考·高一数学(2022年3期)2022-04-28 07:02:46
思维与智慧·上半月(2022年4期)2022-04-08 21:24:29
环球时报(2022-03-14)2022-03-14 18:19:44
家教世界·创新阅读(2021年10期)2021-10-23 05:13:43
小哥白尼(神奇星球)(2021年4期)2021-07-22 03:17:22
电影(2018年8期)2018-09-21 08:00:06
汽车观察(2016年3期)2016-02-28 13:16:36
小猕猴智力画刊(2015年4期)2015-04-28 23:55:53
红领巾·探索(2014年7期)2014-10-10 02:13:56
