基于最值平均的人脸识别LBP算法
2019-09-13 03:38:20赵熙临
计算机应用与软件 2019年9期
付 波 徐 超 赵熙临 郑 璇
(湖北工业大学太阳能高校利用及储能运行控制湖北省重点实验室 湖北 武汉 430068)
0 引 言
随着技术发展,人脸识别已成为当前计算机技术领域的一个研究热点[1],并逐渐融入社会生活,目前已经广泛应用到安全监测、目标跟踪等方面。该技术通过提取人的脸部特征点,利用统计学原理获得特征表达,建立人脸特征模板与被测者的人脸进行特征匹配,从而确定被测者的身份信息。
对于人脸部特征的提取,当前较成熟的技术是LBP算法。LBP算法最早由 Ojala等[2-3]在1994年提出,通过比较3×3模板中心像素与其邻域像素的大小,得到邻域像素的二进制代码,从而得到LBP特征,该算法原理简单、计算量小,但容易缺失局部纹理细节。赵建民等[4]在局部二值模式的纹理提取基础上,引进一种新型局部三值模式(LTP)纹理特征提取方法,此方法对光照变化和噪声更加鲁棒,但其编码存在不确定性,在其灰度范围内不具有严格的单调不变性。王宪等[5]提出了基于分块的完备局部二值模式 (CLBP)人脸识别算法,该算法对原始人脸图像进行分块处理,对每一分块的图像进行局部差异值和中心像素灰度值分析,加强了中心像素与邻域像素的联系,但计算复杂、耗时长。
本文提出的最值平均LBP算法,取3×3模板九个像素值的方差,若方差在限定范围内,将中心像素周围八个像素的最大值与最小值的平均值作为阈值进行比较,否则取九个像素的中值作为阈值进行比较,避免了LBP出现部分因中心像素值偏大或偏小以致湮没细节的现象,保留更多局部细节。然后运用PCA对特征矩阵维数进行降维,提取有效信息,利用K近邻分类算法对不同人脸进行识别分类,实验结果证明了该算法的有效性。
1 局部二值模式
如图1所示,局部二值模式将图像中某像素点灰度值与其邻域像素点灰度值逐一比较。
图1中灰色区域为阈值, Δ为起始点,→为方向。图1(a)是某像素点3×3移动模板,将中心像素灰度值设定为阈值,若邻域8个像素值大于等于阈值,将该邻域像素值设置为1,反之为0。设置起始点后,可得一个8位二进制数,如图1(b)所示。从起始点按(顺时针方向)设置后各像素权重,如图1(c)所示,将中心像素点周围的11110001二进制数转化为十进制数,即是该中心像素点的LBP值(LBP=1+16+32+64+128=241),如图1(d)所示。其公式为:
(1)
式中:s是标记中心像素周围八个近邻像素点,Ps代表其像素值,Pj代表中心像素点的像素值,LBPpj表示LBP码,t(r)是符号函数。提取人脸的LBP特征图像如图2所示,其中图2(a)为原始人脸灰度图像,图2(b)为LBP特征图像。

(a) 原始灰度图 (b) LBP特征图图2 特征提取
为了提取更多有效的特征信息,将人脸图像进行均等分块,并将每个分块的LBP特征进行直方图统计[6],然后串连成特征向量,得到直方图矢量,本文使用3×3分块模式,如图3所示。
LBP算法原理简单,计算量较小,并且在各像素相对位置不发生变化的情况下,LBP值对于像素值单调变化具有不变性,有利于特征纹理描述。
2 最值平均法
为了了解细节特征,利用方差[7]测试了3×3模板像素值的波动范围。当波动较小时,特征较平缓,容易出现中心像素偏大或偏小;当波动较大时,特征变化加大,容易形成噪声。为此提出了最值平均法。最值平均法取3×3模板九个像素的方差,若方差在限定范围内,将中心像素周围八个像素的最大值与最小值的平均值作为阈值进行比较,避免因中心像素值偏大或偏小以致湮没细节的现象,否则取九个像素的中值[8]作为阈值,与周围八个像素值进行比较,减少噪声的影响,重新计算LBP码,以更新中心像素值。
该算法流程如下:
1) 针对某像素构造3×3模板,计算模板中九个像素的方差V,其公式为:
(2)
式中:M为九个像素的平均值,Pj为模板九个像素值;
2) 设定阈值a,判断V是否小于阈值a;
3) 若步骤2返回为真,取中心像素邻域8像素的最大值Ymax,最小值Ymin,将Ma=(Ymax+Ymin)/2设为3×3模板的阈值;
4) 若步骤2返回为假,将九个像素的中值作为阈值Ma;
5) 将模板中的8邻域像素值与Ma比较得到二进制图像;
6) 将该二进制图像转化为LBP码,得到新的LBP特征图。(步骤5、步骤6)的计算与式(1)的计算相同)
对图2(a)采用最值平均法计算LBP特征如图4所示。

图4 最值平均法特征图
与图2(b)对比可见,图4的纹理特征较图2(b)更清晰,保留了更多的图像局部的细节特征,提高了纹理特征的提取效果,有利于实现对微小纹理特征的识别。
3 最值平均的人脸识别算法
3.1 算法流程图
基于将PCA与K近邻相结合,本文提出了基于最值平均的人脸识别LBP算法,其算法流程如图5所示。
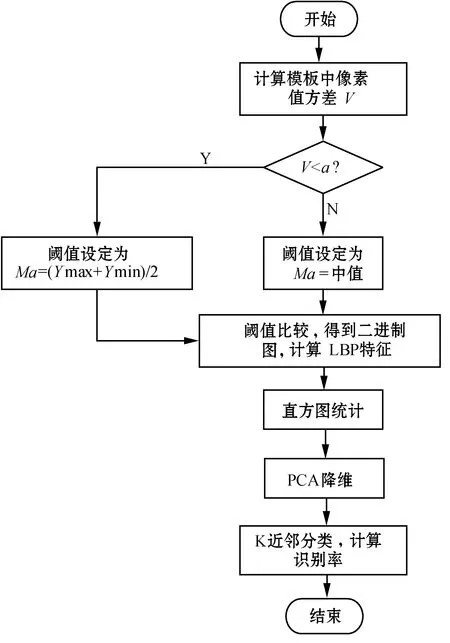
图5 流程图
3.2 特征提取
本文的特征提取算法是将LBP进行改进的最值平均算法,其算法编程如下所示:
for i=2:m-1
//排列3×3模板像素
for j=2:n-1
k=1;
p=i-1;
for q=j-1:j+1
y(k)=img(p,q);
k=k+1;
end
p=i;
y(k)=img(p,j+1);
k=k+1;
p=i+1;
for q=j-1:j+1
y(k)=img(p,q);
k=k+1;
end
d=y(k-1);
y(k-1)=y(k-3);
y(k-3)=d;
p=i;
for q=j-1:j
y(k)=img(p,q);
k=k+1;
end
y1=y(1:8);
W=var(y);
//计算方差
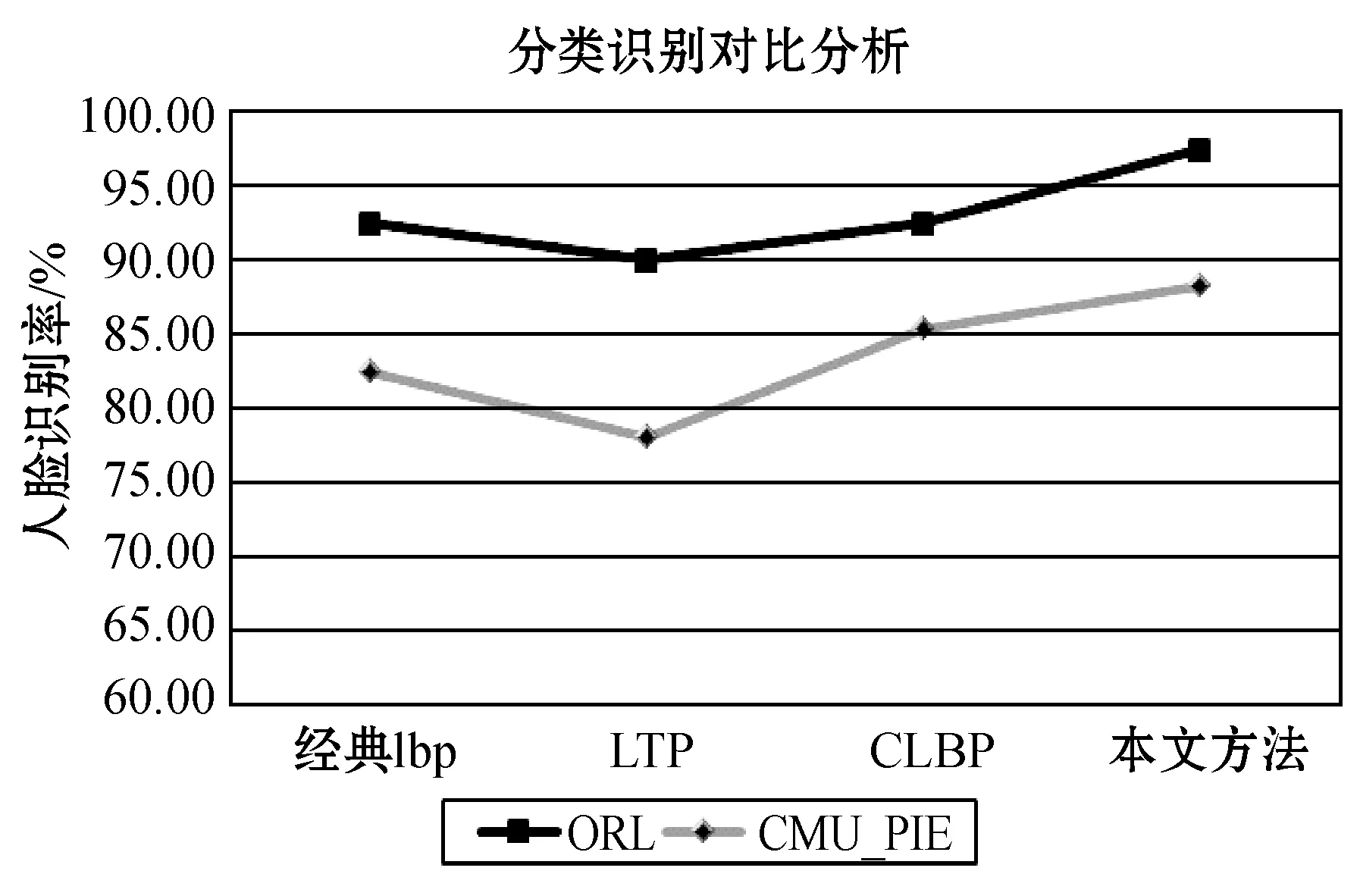
if W //比较方差与阈值的大小 a=max(y1(:)); //计算中心像素周围8 //像素的最大值与最小值 b=min(y1(:)); c=(a+b)/2; //计算最值平均 else c=median(y); //计算3×3模板的中值 end s=0; for r=1:8; if y(r)>c //将模板中的8邻域像素值与 //阈值比较得到二进制图像 s= s+2^(r-1); //计算LBP码,得到新的LBP特征图 else s=s; end end imgn(i,j)=s; //提取特征图 end end 主成分分析是降低高维数据并提取有效信息的分析算法,它是在误差最小的条件下获得数据降维的最佳方式[9],且不受模式分布的影响,它能简化LBP直方图特征的计算量以及存储空间问题。LBP算法等都是提取图像的特征向量,然后串联成一个特征向量矩阵。在分析的时候,因为矩阵维数偏大,对于识别效果有一定的影响,所以需要对向量矩阵进行降维处理。PCA首先对样本图像进行归一化处理,然后求出归一化后的协方差矩阵,计算出特征值与特征向量,并根据特征值对特征向量依次进行排序,然后选择输出维度。 K近邻[10]是基于统计学的分类算法。它是由最近邻的基础发展而来,是分类算法中比较容易理解的算法之一。与其他分类识别方法相比,该方法预先建立分类器,不需要估计参数,从而极大地降低了计算的复杂程度,并且分类精度较高。其基本原理是计算测试样本与每个训练样本之间的距离,然后挑选其中最近的K个训练样本的编号,通过这K个编号对测试样本进行预测,得到测试样本的编号,以此推算出识别率。 本次实验操作平台由i3-4030U,(GPU)Intel(R) HD Graphics Family,Windows10操作系统(64位)构成,仿真软件是MATLAB 2013。用到ORL数据库的400张人脸图以及CMU_PIE数据库的1 632张人脸图,人脸图分别设置为92×112以及64×64的灰度图像。ORL数据库由40个人,在10幅不同的光照、不同角度摆拍情况下的图片组成;CMU_PIE数据库由68个人,在24幅不同的光照、不同角度摆拍情况下的图片组成。从ORL数据库中选用每人的8幅图片作训练样本,CMU_PIE数据库中选20幅作训练样本,其余图像分别作测试样本。PCA算法经过本样本空间实验证明,降到30维效果最佳,维数过高会增加特征的稀疏空间,过低会影响特征的细节提取,偏大偏小都会影响识别效果。K近邻算法的K值设定为5,K的值偏小,会减小近似误差,但是预测的结果会对近邻的实例点非常敏感,容易拟合成噪声点,出现偏差,K的值偏大会增加近似误差,会对输入实例较远的训练实例起到比较作用,使预测发生错误。 为了分析最值平均算法的识别效果,本实验用不同的数据库测试了不同的特征提取算法的识别效果,将它们的实验结果进行了对比,如图6、表1所示。 图6 两个数据库分类识别对比分析 表1 实验结果数据分析 由图6与表1可知,在ORL数据库中经典LBP方法和CLBP的识别率为92.5%,LTP为90%,而本文方法可以达到97.5%;在CMU_PIE数据库中,经典LBP的识别率为82.35%,LTP只有77.94%,CLBP有85.29%,本文方法的识别率依然有88.24%。不管在ORL数据库,还是在CMU_PIE数据库中,本文方法都有最好的识别效果,由此可见,基于最值平均的改进LBP算法有助于提高人脸的识别率,有很好的使用价值。 为了对比不同方法的计算速度,分别计算了四种方法提取一幅人脸图片的时间,如表2所示。 表2 计算时间对比表 从表2中可以看出,除了经典LBP算法特征提取时间小于0.1 s,其余三种算法都在0.1 s之上,而本文算法优于其他两种算法。由此可见,本文算法不仅有很好的识别率,同时运算速度比较高效。 为了提高人脸识别的识别效果,本文提出了基于最值平均的改进LBP算法。首先利用最值平均法将人脸图片的局部纹理特征提取出来,通过直方图统计,形成特征向量矩阵;然后利用PCA对其进行降维,提取主要信息;最后利用KNN对降维后的特征矩阵进行分类,计算出识别率。实验表明,在本文样本空间内,本文算法对人脸的识别效果是最好的,运算时间较少,具有较高的使用价值。3.3 主成分分析
3.4 K近邻
4 实验分析


5 结 语
猜你喜欢
中学生数理化(高中版.高二数学)(2022年3期)2022-04-26 14:03:32
少儿美术·书法版(2021年9期)2021-10-20 06:35:00
中学生数理化(高中版.高考数学)(2021年12期)2021-03-08 01:28:48
河北理科教学研究(2020年3期)2021-01-04 01:49:38
中学生数理化(高中版.高二数学)(2020年11期)2020-12-15 22:17:33
吉林大学学报(理学版)(2020年3期)2020-05-29 06:32:16
动漫星空(2018年9期)2018-10-26 01:17:14
自动化学报(2018年7期)2018-08-20 02:59:04
周口师范学院学报(2016年5期)2016-10-17 06:36:47
发明与创新(2015年33期)2015-02-27 10:40:09