消化道磁悬浮胶囊机器人模型及控制系统
2019-09-12 02:56郑齐冯久奎
医疗装备 2019年17期
郑齐,冯久奎
1 福州大学至诚学院 (福建福州 350002);2 福州大学物理与信息工程学院 (福建福州350108); 3 锐捷网络股份有限公司 (福建福州 350002)
目前我国慢性消化系统疾病发病率为24.9%,其中消化道肿瘤是高发病种。《柳叶刀》上的报告显示2010—2014年中、日、韩3国胃癌患者5年生存率分别为35.9%、60.3%、68.9%,我国胃癌患者5年生存率远低于周边国家。消化系统疾病的筛查工作不便开展,其主要因素是传统插管式胃镜检查让患者痛苦不堪。胶囊内窥镜可大幅度减少消化道检查引起的不适感,但普通胶囊内窥镜不适用于胃部检查,漏检率较高。本研究设计的磁悬浮微型机器人定点释药导航系统适用于胃部、小肠等消化道疾病的检查及治疗。
1 研究现状
2000年在美国加利福尼亚圣地亚哥的消化疾病周会议上,来自以色列的Given Imaging公司,宣布研制了世界上第一个无创可吞咽胶囊式肠镜拍摄检查系统“M2A”[1],可实现小肠 “无痛”检查。但是胃肠道梗阻患者使用该胶囊内窥镜时存在胶囊滞留现象。胶囊滞留是指胶囊在胃肠道内滞留时间长达2周以上[2],小肠胶囊内窥镜的滞留率为1.4%~2.6%[3]。因此Given Imaging公司开发了一种能够自我分解的胶囊AgileTM Patency System用于小肠检测[4]。2004年重庆金山科技集团开发出国内第一款小肠胶囊内窥镜“OMOM”,并于2005年3月获得原国家食品药品监督管理局颁发的医疗器械注册证。2006年日本奥林巴斯公司发布了一款小肠胶囊内窥镜,具有0~20 mm的景深和自动照明亮度控制功能,可持续工作8 h,每秒可实时发送2张图像到体外采集器上。SmartPill公司推出一款可检测pH、温度和压力的胶囊内窥镜,并于2006年获得美国食品药品管理局(U.S. Food and Drug Administration,FDA)批准上市。2009年杭州华冲科技有限公司在国家“863计划”的支持下,用自主知识产权专用芯片开发出胶囊内窥镜,并于2011年获得原国家食品药品监督管理局颁发的医疗器械注册证。图1为目前市场常见的几种胶囊内窥镜,主要分为可控和不可控两大类。胶囊内窥镜可一次拍摄几万张消化道照片,医师需花费大量时间仔细对比,查找可疑病灶图像,严重影响工作效率,导致检查的时间成本增加,且与传统软管式胃肠镜对比,胶囊内窥镜无法进行活检取样等操作。

图1 市场常见的几种胶囊内窥镜
当前,胶囊内窥镜的智能驱动已经成为一个热门研究课题。2003年日本东北大学Sendoh和Ishiyama[5]提出一种类似三轴亥姆霍兹线圈提供旋转空间磁场,使胶囊能够旋转起来,依靠胶囊表面设计的螺旋纹结构推动旋进。2004年奥林巴斯公司提出由3对电磁铁构建一个均匀的电磁场驱动胶囊内窥镜旋转,借助外表面螺纹结构,实现胶囊的前进后退,同时内置了无线能量传输技术[6]。日本长野县RF SYSTEM实验室的Norika团队提出一款具有无线充电、活检采样仓、定点释药仓、无线图像传输、可变波长发光二极管(LED)等技术的磁控胶囊,外部3个方向的磁场变化可带动胶囊做类似电机内转子的旋转运动,实现胶囊的旋转运动[7],目前该方案仅是构想,未实现商业化。2010年Gao等[8]设计、构造了一种多自由度磁场驱动胶囊内窥镜推进系统,采用一个永磁铁柱状外壳包覆胶囊表面,通过两组钕铁硼永磁铁提供的磁场驱动胶囊内窥镜,每组包含1个矩形和1个圆柱形永磁铁,应用有限元方法仿真磁场分布和力学特性,并通过试验模拟胶囊在肠道内运动,表明了该方法的可行性。安翰科技(武汉)股份有限公司开发出一款Navicam磁控胶囊胃镜检查系统,可通过控制C型机械臂实现胶囊旋转、翻转[9-10],并于2013年获得原国家食品药品监督管理总局三类医疗器械注册证。2015年徐建省等[11]采用电机带动螺旋桨的驱动方式,由外部3对亥姆霍兹线圈产生指定大小和方向的导向磁场,实现了对胶囊运动方向的控制。赵振亮等[12]于2018年提出一种采用复合磁场的闭环主动控制方法,将霍尔传感器放置于胶囊内部,通过无线通信方式,将胶囊内部磁场传感器测量到的信号发送给外部控制设备,进而调节磁场,实现闭环控制。上述国内外研究成果推动了胶囊内窥镜的发展,并为该领域研究提供了重要的借鉴和指导。然而这些驱动方式还存在着控制精确度差、空间状态锁定及无法实施活检取样等方面的不足。
2 胶囊磁悬浮系统设计
2.1 胶囊设计
目前的胶囊内窥镜普遍存在以下不足:(1)操控精度较低;(2)续航受限;(3)功能单一;(4)无法定点释药和活检取样等。
为解决以上问题,现提出一款上推式磁悬浮胶囊机器人,其内部结构如图2所示。该胶囊由具有生物相容性的透明有机材料制成,胶囊内部主要由摄像头、可调波长照明LED、超级电容、无线电发射电路、活检取样装置、药仓、永磁体、无线供电线圈等组成。永磁体设计成类半球体形状,使整个胶囊的重心靠近胶囊垂直方向的底部,受重力作用,胶囊在没有其他外力作用下可保持竖立状态。

图2 上推式磁悬浮胶囊机器人内部结构
底部安装无线充电感应线圈,用于接收来自悬浮底座的无线能量传输,整流稳压后存储于胶囊内的超级电容,供摄像头、LED、给药器、取样装置、无线图传电路等使用;永磁铁采用钕铁硼永磁材料,置于重心位置,外形经过设计可产生特定的磁场配合上推电磁铁,同时锁定永磁铁的空间位置,使其保持固定,保证摄像清晰、稳定;药仓采用电控微阀门设计,内部气压高于外界,当微阀门打开时内部的药剂便会喷射、粘附于患处;照明采用可调节波长的发光二极管,以扩展检测范围,提高病变检出率;通信电极由两片环绕胶囊的金属环构成,用于数据通信传输及体内电刺激治疗;活检取样装置采取电控微弹片刀结构,当外界发送控制信号时,紧贴患病部位的微弹片瞬间切取小块病变组织,并收入活检取样仓。
2.2 检测平台设计
检测平台如图3、4所示。磁悬浮底座安装在平台底部的机械臂上,平台呈弧形结构贴合人体,缩短磁悬浮控制底座与体内胶囊的距离。该平台通过中间的支撑轴可实现水平方向旋转和垂直方向位移,同时还可实现前后滑动,用于调节胶囊在人体内的纵向位置。磁悬浮控制底座在多轴机械臂的控制下可进行平移和多角度旋转运动,配合平台的简单平行运动可实现体内胶囊不同空间状态的控制,并可采集消化道内各视角的图像,任意调节胶囊的角度和距离,均可保证图像的清晰度。
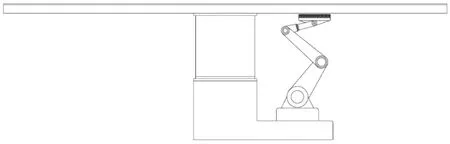
图3 平台正视图

图4 平台左视图
2.3 磁悬浮控制底座设计
磁悬浮控制底座内部结构如图5所示。中间安装1个高精度三维磁敏霍尔传感器,霍尔传感器采用基准恒流源提供偏置电流。在胶囊内永磁铁的磁场作用下,霍尔传感器输出端产生微弱的电势,经放大器放大后送至AD采样电路,高精度传感器产生的电势转换为对应的磁感应强度,从而可判断胶囊的实时相对位置。霍尔传感器的8个方向上各安装1个电磁铁,可根据胶囊实时位置调节电磁铁中的电流,控制电磁铁产生的磁场,推动胶囊悬浮在目标位置。
胶囊的磁悬浮控制系统是一个不稳定的非线性系统,线性化拟合数学模型的建立较为困难,因此采用PID算法,联合python语言编写的神经网络算法进行PID参数整定,通过霍尔传感器检测信号换算成位置信息,实现闭环控制,具有较强的鲁棒性和良好的动静态性能。磁悬浮控制底座的结构设计保证了胶囊受力平衡、悬浮稳定。磁悬浮控制底座安装于机械臂上,机械臂由连接计算机的操纵摇杆进行控制,可实现磁悬浮控制底座的移动和旋转。

图5 磁悬浮控制底座内部结构
2.4 磁悬浮控制流程
胶囊磁悬浮控制流程如图6所示。胶囊与磁悬浮控制底座的相对位置及空间状态由计算机设置、锁定;胶囊相对人体的倾斜角度由机械臂旋转进行控制;胶囊与磁悬浮控制底座的距离微调可通过调节电磁铁的电流实现。
当胶囊进入人体内时,缓慢移动磁悬浮底座,实时监测霍尔传感器采集到的电压信号,确定胶囊在体内的空间位置及状态。由于胶囊内部的重心设计,在有足够空间的器官内,胶囊受重力作用始终处于竖直状态;通过观察胶囊传送回的图像,可确认胶囊的位置;计算机自动运算并输出控制信号到功率放大器,以控制电磁铁校准胶囊空间位置至平衡状态。
操作摇杆时,计算机通过计算摇杆的输入信号判断水平、垂直方向的位移量,进而控制平台可进行相应的水平移动、垂直升降;当需要胶囊倾斜旋转时,平台下方的机械臂根据计算机计算结果,可进行相应角度的倾斜、旋转。
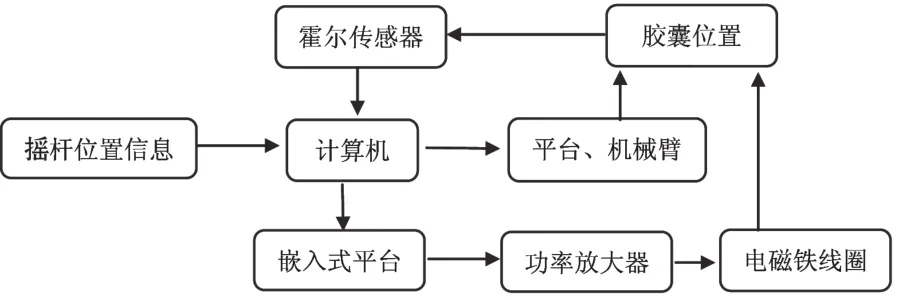
图6 胶囊磁悬浮控制流程
3 结语
目前胶囊机器人的能耗、精确控制成为其功能拓展的瓶颈。更低的能耗可带来更多的功能,同时可节省电池占用空间,增加更多的装置。例如提高CMOS相机的像素以及拍摄的帧率,清晰的图像有利于医师快速定位和后期图像的人工智能筛检、分析;改进为可变波长的LED照明装置,可用于特殊检查;增加胶囊体内精确定位装置;设计活检取样装置进行病变部位样本采集;增加释药仓用于体内定点释药等。本系统可解决能耗及精确运动控制问题,相信在不久的将来,这款多功能胶囊机器人的普及可以让广大患者更加舒适地体检,并可应用于临床体内微创治疗等。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
小猕猴智力画刊(2022年4期)2022-05-23
现代仪器与医疗(2022年1期)2022-04-19
一重技术(2021年5期)2022-01-18
现代仪器与医疗(2021年6期)2022-01-18
现代仪器与医疗(2021年4期)2021-11-05
小学科学(学生版)(2021年4期)2021-07-23
中学生数理化·八年级物理人教版(2019年4期)2019-05-20
装备制造技术(2018年10期)2018-12-24
中学生数理化·八年级物理人教版(2017年6期)2017-11-09