
基于十字轴式万向轴的机械手设计
2019-09-10 07:22陈安琪贾仕铭何峥纬尹文锋
河南科技 2019年28期
陈安琪 贾仕铭 何峥纬 尹文锋


摘 要:自动机械手可用于工件的搬运、装卸,机器零部件的组装,在生产中已经得到广泛应用,但在特定工作环境下仍需要对机械手进行人工控制。传统的自动机械手的抓取手采取推杆式结构,无法满足大力矩输出要求。本文设计了一种采用步进电机与传感器相配合的万向轴式机械手。该机械手对传统推杆结构进行了改进,缩短了力矩,减小了力的损耗,从而增大了输出力矩,同时增设步进电机与传感器,便于调节角度,以满足不同工作环境的需求。
关键词:十字轴;机械手;步进电机;传感器
中图分类号:TH133.2 文献标识码:A 文章编号:1003-5168(2019)28-0050-03
Design of Manipulator Based on Cross Universal Shaft
CHEN Anqi JIA Shiming HE Zhengwei YIN Wenfeng
(Southwest Petroleum University,Chengdu Sichuan 610500)
Abstract: Automatic manipulator can be used for the handling and loading of workpieces, the assembly of machine parts, which has been widely used in the production, but it still needs to be controlled manually under the specific working environment. The traditional grab of automatic manipulator adopts push rod structure, which can not meet the requirement of large torque output. In this paper, a kind of universal shaft manipulator was designed, which used stepping motor and sensor. The manipulator improves the traditional push rod structure, shortens the torque, reduces the loss of force, and increases the output torque. At the same time, a stepping motor and a sensor were added to facilitate the adjustment of the angle, so as to meet the needs of different working environments.
Keywords: cross shaft manipulator;stepping motor;sensor
1 問题提出
传统自动机械手在生产流水线上已被广泛应用,但在特定工作环境下仍需人为控制机械手的运转。而通过操作机械手,能完成高强度、危险、腐蚀性的工作,减轻人类劳动强度,减少劳动危险。但传统机械手上的抓取手都采用固定运转模式,无法适应特殊工作环境,且有大量的调整程序,耗费人力与时间。因此,急需对现有的结构进行改进,提高控制灵活度与响应速度。
2 解决方案
考虑到传统机械手的运转存在角度调节固定、无法根据特有环境调整的缺点,本文设计了一款新的机械手设置。该装置主要包括操作杆、传感器、控制器和步进电机[1]。操作杆采用相对位移量给出机械手的运动量;传感器检测操作杆的位移量,并将信号传给控制器;控制器对信号进行处理,对步进电机发出控制指令,使电机协调转动,并驱动机械手完成抓放及搬运动作。步进电机的旋转是以固定角度一步一步运行的,可以达到准确定位的目的;同时,可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。操作杆未采用普通旋转铰链的连接方式,而是采用三个十字轴式万向轴,使操作更加灵活。
在操作机构中,集合机械臂三个主要运转自由度的控制于一个操作杆上,人为手动控制操作杆完成机械手的运转。电机使用步进电机并且配合单片机编程,通过传感器监测角度与位移关系,模拟人手抓取物料的运动方式。采用三爪式抓取手缩短了力矩,减小了力的损耗,从而增大了输出力矩,更好地配合整个机械臂的运行[2]。
3 机械手的结构
3.1 整体结构
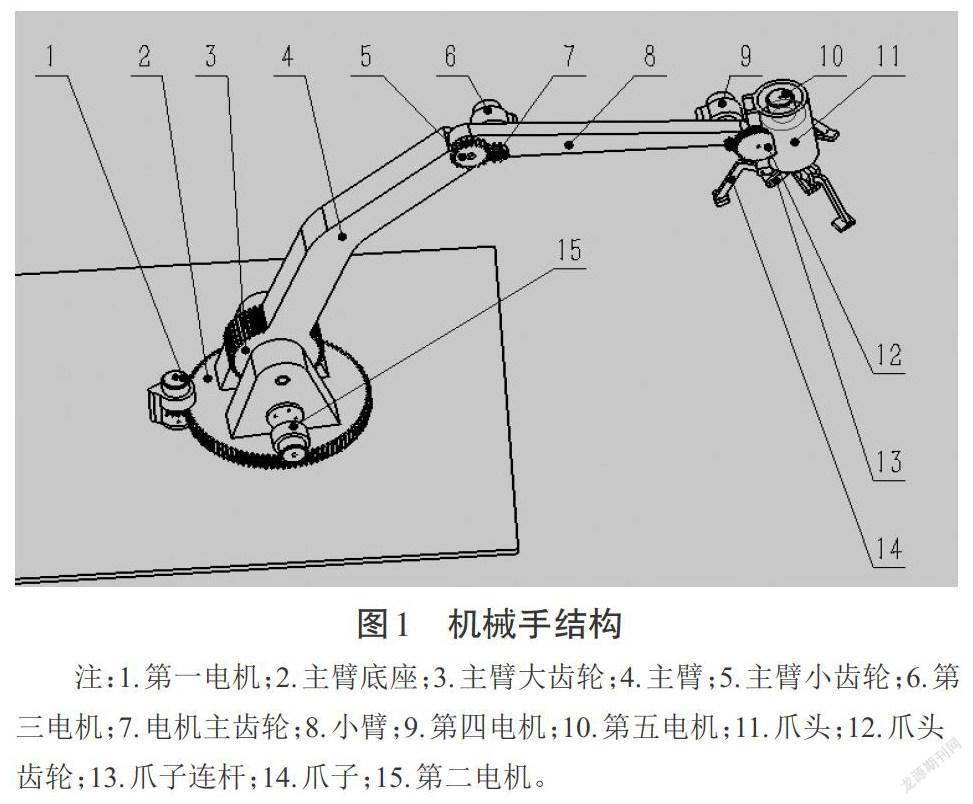
本设计方案提供一种十字万向轴的机械手。在底板前端开设多个定位孔以固定操作系统。使用螺柱与螺杆紧固件连接底板和操作系统多个十字万向轴的底座和第一转轴轴套。底板定位孔与工作台螺纹孔对齐后,可将整套系统固定在工作台上,满足工作所需的机械手稳定性、牢固性[3]。机械手结构具体如图1所示。
3.2 操作部分
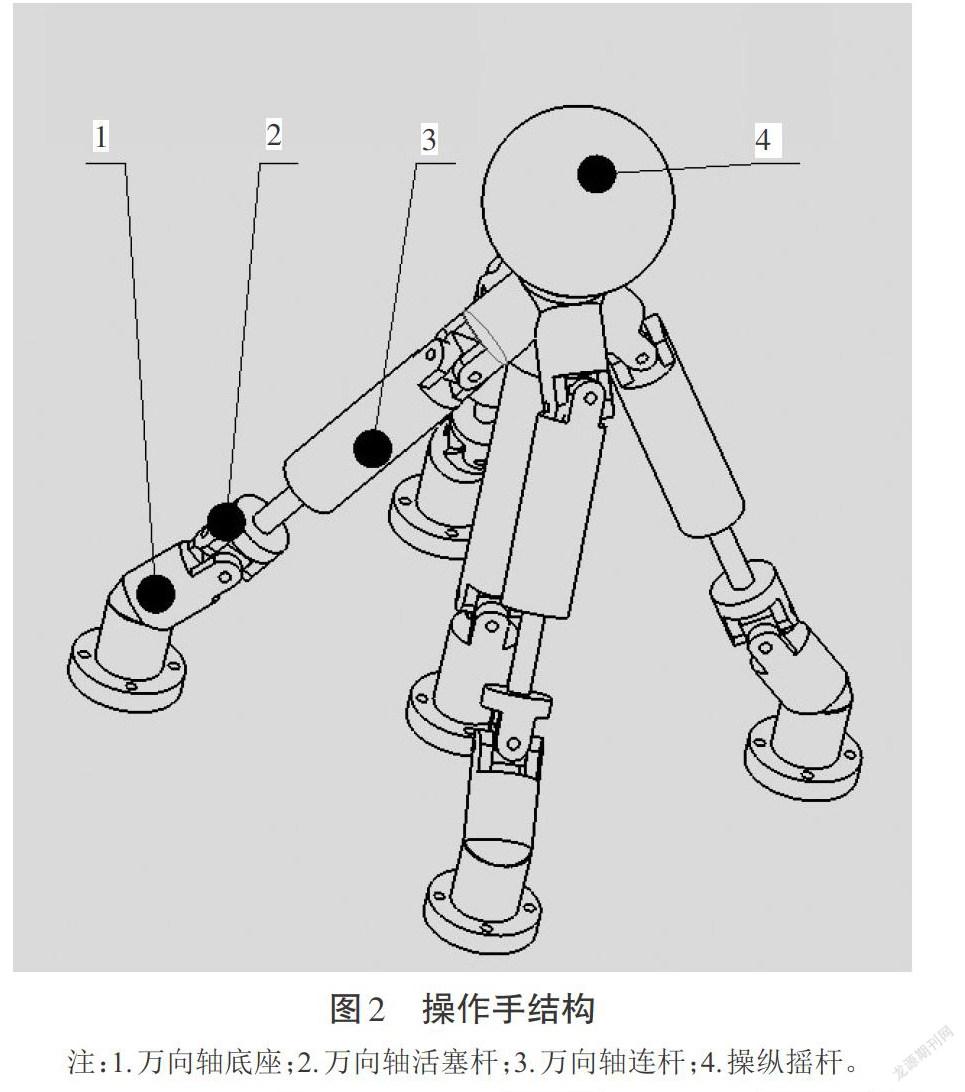
机械手的操作部分如图2所示,外围设置四个万向轴底座,中间有单一万向轴底座。外围的万向轴底座与万向轴塞杆连接,中间的万向轴底座与摇杆连接。塞杆插入万向轴连杆,两部件间可相对滑动。万向轴连接是典型的球铰,所以摇杆可以在空间内运动。随摇杆的运动,塞杆会在连杆里面滑动。塞杆与连杆间有距离传感器,距离传感器把连杆与塞杆的相对位置转化为信号传递给中央处理系统进行计算,计算机根据信号就可以知道摇杆的运动状态。通过算法编程,计算机将这些信号传递给电机,这样电机就在摇杆控制下运转。人手负责操作摇杆,这样操作系统就像一个遥控器一样,精确地将手的运动状态表现在机械臂运动上。操作手系统有两个如图2所示的摇杆系统,两只手分别控制。系统总共有5个电机,分别对应5个自由度,一个摇杆系统控制2个自由度,而另一个摇杆系统控制3个自由度。左手控制机械臂主臂底座的转动和主臂的摆动,右手控制小臂的摆动和爪头的摇动。由于右手的摇杆上多加了一个开关直接控制第五电机的启停,所以5个自由度完全得到控制。
3.3 传动部分
运转系统如图3所示。机械臂的每个电机都是采用步进电机,这能使系统的操作更加精确稳定。第一电机连接有电机主齿轮,主齿轮与底座上的大齿轮啮合,负责带动主臂底座转动。主臂底座转动带动整个机械臂在空间做水平旋转运动。第二电机上的主齿轮以同样的方式与主臂上的主臂主齿轮啮合,电机的转动带动主臂在竖直平面内做旋转运动。同样的设计理念,主臂与小臂用第三电机间接铰接,小臂与爪头之间是第四电机。第一到第四电机与系统的传动是通过轮系将电机的扭矩传递给机械臂。爪子的运动是螺杆与滑块带动的,电机的转动转化为滑块相对爪头的滑动。第五电机的传动是通过螺杆到滑块,再由滑块通过连爪子连杆传递给爪子[4]。
3.4 手爪部分
手爪部分如图4所示。爪子铰接在爪头上,同时也与爪子连杆铰接。滑块相对固定在爪头的滑道里面,可相对直线滑动。连杆在中间连接并传递扭矩[5]。滑块的滑动来源于螺杆,螺杆与第五电机轴固定连接,电机的转动直接转化为螺杆的转动。通过这样的连接,电机的转动扭矩转化为了爪子的摇摆扭矩,可以对一定重量的物品施加压力,从而夹取物品[6]。
3.5 控制部分
采用西門子单片机对摇杆的运动信号进行计算,通过塞杆和连杆之间的距离变化计算出摇杆在空间的位置。然后通过制定好的程序将信号放大,传递给各个电机,通过控制电机的旋转角度完成对机械手的控制[7]。
4 结语
本文所设计的自动机械手弥补了传统机械手的缺陷,用单个操作杆配合步进电机开关启停完成整个操作过程。同时,步进电机的旋转是以固定的角度一步一步运行的,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的,更便于调节机械手的运动行程。
参考文献:
[1]杨翠丽,陈思.六轴机械手设计[J].山东工业技术,2018(23):29.
[2]杨可桢.机械设计基础[M].北京:高等教育出版社,2013.
[3]濮良贵.机械设计[M].9版.北京:高等教育出版社,2013.
[4]吴宗泽.机械设计手册[M].北京:机械工业出版社,2002.
[5]蒋平.工程力学基础(Ⅱ):材料力学[M].北京:高等教育出版社,2009.
[6]毛昕,黄英,肖平央,等.画法几何及机械制图[M].北京:高等教育出版社,2010.
[7]成大先.机械设计图册[M].北京:化学工业出版社,2000.
猜你喜欢
机电工程技术(2021年3期)2021-09-10
中国电子报(2019年54期)2019-10-24
环球时报(2019-07-18)2019-07-18
时代英语·高一(2019年1期)2019-03-13
现代职业教育·中职中专(2018年7期)2018-05-14
中学物理·初中(2017年8期)2018-03-06
科学家(2016年3期)2016-12-30
电子技术与软件工程(2016年22期)2016-12-26
科技视界(2016年24期)2016-10-11
新高考·高一物理(2015年5期)2015-08-18
