
基于无线充电的无人机充电平台研究
2019-09-10 07:22金昭夏国华王澜
河南科技 2019年31期
关键词:无人机
金昭 夏国华 王澜





摘 要:由于无人机电池储能的不足及充电的复杂性,本文提出了一种基于无线充电的无人机充电平台。首先,对比了多种充电方案的优缺点;其次,搭建了该平台的模型并解释了充放电的具体实现方法;最后,详细说明了互感耦合理论的具体实现方法。
关键词:无人机;无线充电;互感耦合
中图分类号:TP3919;V279;V242 文献标识码:A 文章编号:1003-5168(2019)31-0011-03
Research on UAV Charging Platform Based on Wireless Charging
JIN Zhao XIA Guohua WANG Lan
(State Grid Hubei Electric Power Co., Ltd. Xianning Power Supply Company,Xianning Hubei 437100)
Abstract: Due to the lack of energy storage and charging complexity of the UAV battery, this paper proposed a charging platform based on wireless charging. Firstly, the advantages and disadvantages of various charging schemes were compared; Secondly, the model of the platform was built and the specific implementation method of charging and discharging was explained. Finally, the realization of mutual inductance coupling theory was explained in detail.
Keywords: UAVs;wireless charges;mutual coupling
由于无人机电池续航能力差影响无人机的运行,且充电步骤又比较烦琐,影响工作效率,由此,本文结合系统负载时无人机的性能特点和悬停状态下拾取使用电能的独特性,对无人机充电平台内的无人机悬停的无线充电部分进行针对性设计。
本文通过对各种充电方案进行对比分析,建立了充电平台模型,并对线圈进行了研究分析,从多方面验证该方案的可行性。
1 無线充电技术
1.1 电磁辐射式无线充电技术
目前,这类技术通常采用微波功率传输(MPT)和激光功率传输(LPT)两种方式实现,能以较小功率远距离传输电能[1]。然而,这类技术在传输路径中找不到障碍物,且局限性较大,应用面较小,本文不讨论此类技术。
1.2 电磁感应式无线充电技术
电磁感应式无线充电技术基于电磁感应定律,通过形成于原级和次级线圈之间互相耦合的电磁场来进行电能传输,是一种属于电磁场近场耦合的无线电能传输技术[2]。但是,该技术的传输距离较短,因此只能适用于小型家电及便携电子设备的充电。
1.3 电磁共振式无线充电技术
与感应式无线电能传输技术相比,电磁共振式无线充电技术增加了两个共振线圈,这两个共振线圈自身品质因数[Q]值很高,并且相互耦合[3]。这两个[Q]值极高的共振线圈,在空间中形成更高强度的磁场,电能可在更远的距离进行高效传递,对人类的影响相对较小,十分可靠和安全[4]。
2 无线充电平台
2.1 无线充电平台特征
无线充电产品充电时都需要保持充电原级和次级线圈的相对静止。而无人机自重较轻,且受环境、人为因素的制约,因此,其内部充电原级很难保持与电能发射线圈的相对静止。由此,对于无人机无线充电系统,需要考虑无人机自身的特征,进行有针对性的设计,并对悬停情况下的无线电能传输进行重点分析[5]。
2.2 无线充电平台模型
该无线充电平台主要由三部分组成:电能变换装置、能量发射线圈和高压线缆。电能变换装置直接从高压线缆取电,先将发电机的交流电用整流器变成直流电给蓄电池充电,再将直流电用逆变器变换成电压和频率稳定的交流电输出供给负载使用。耦合机构的互感模型如图1所示。
无人机悬停充电时电路会表现出如下特征。
第一,动态负载。在空中,无人机必须与发射装置保持相对位置静止。此时,系统负载的电动机输出功率会发生改变,对于基于无线电能传输技术的充电系统,则等效为负载发生变化,即是一个具有动态负载特性的系统。
第二,动态互感。悬停情况下的无人机会不断进行姿态调整,与能量发射装置产生位移,这种位移可能是多方向的。这将直接导致耦合机构间的互感发生变化,使系统具有动态互感特性。
第三,耦合机构弱耦合。两个线圈的耦合程度,即耦合系数[K]由原级线圈自感系数[LP]、次级线圈自感系数[Ls]及原级、初级间的互感系数[M]共同决定,[K]的表达式为:
[K=MLPLS] (1)
笔者希望无人机悬停充电时与能量发射线圈的距离越大越好。但是,距离变大,耦合机构间的互感系数将会变小,当距离为耦合机构尺寸的若干倍时,耦合机构间的互感系数会变得十分小,导致线圈耦合程度较弱,即基于无线充电的无人机充电平台是一个具有弱耦合特性的无线电能传输系统。
3 互感耦合理论
3.1 互感现象
由电磁感应定律可知,感应电动势会随着穿过线圈的磁力线的变化而变化。某一线圈的磁通会随着自身电流的变化而改变,从而在线圈中产生自感电动势,若两个线圈相距很近,前一线圈的磁力线会穿过另一个线圈。当电流改变时,相邻线圈中的磁力线也会跟着改变,从而在该线圈中形成感应电动势,该现象称为互感现象。
图2为耦合机构的互感模型,其中[Lp]是原级线圈,[Ls]是次级线圈,[Ip]和[Is]是原级及次级线圈中的电流值,[M]是原级和次级线圈的互感。当原级线圈通入频率为[ω]的高频交流电时,线圈周围会形成高频的电磁场。当次级线圈感应到原级线圈发出的电磁场后,便会产生高频感应电压,这个电压由[Ip]决定,大小等于[jωMIp]。同理,原级线圈的电压由[Is]决定,大小等于-[jωMIp]。通过改变输入高频电流的频率可以提高传输电压及效率。
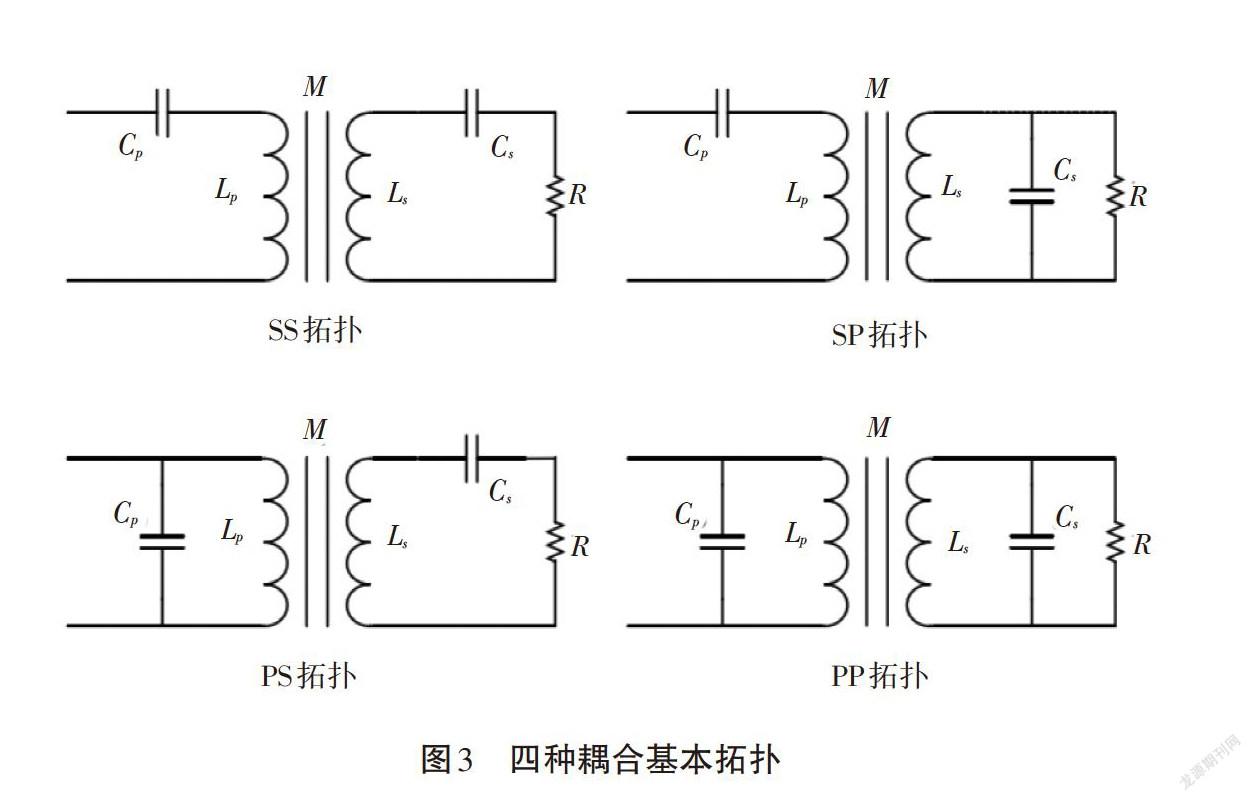
3.2 谐振补偿方式
角频率会随着线圈阻抗的增加而增加,从而增加线圈的无功损耗,无功损耗又会影响传输功率。为降低无功损耗,增大传输功率,需要增加电容进行补偿,让整个耦合机构在谐振状态下工作。谐振补偿方式有两种,即并联补偿和串联补偿。当原级和次级线圈采用这两种补偿方式时,可构成四种耦合基本拓扑:SS拓扑、SP拓扑、PS拓扑、PP拓扑。四种耦合基本拓扑如图3所示。
带反射阻抗的原级电路主要包含原边串联谐振和原边并联谐振两种。其中,次级作用在原级上面的等效阻抗,即反射阻抗,通常用[Zr]表示。
反射阻抗[Zr]是由原级线圈中交流电压的角频率和原级线圈与次级线圈之间的互感[M]共同决定的,其关系式为:
[Zr=ω2M2ZS] (2)
其中,[Zs]是次級线圈的等效阻抗,可根据式(3)计算得出。
[Zs=jωLs+1jωCs+R 次级串联谐振jωLs+1jωCs+1/R 次级并联谐振] (3)
将式(2)代入式(1),可以得到反射阻抗[Zr]的实部[ReZr]和虚部[ImZr]分别为:
[ReZr=ω2C2SM2R2(ω2CSLS-1)2+ω2C2SR2 次级串联谐振ω2M2R2R2(ω2CSLS-1)2+ω2L2S 次级并联谐振] (4)
[ImZr=-ω3CsM2(ω2CsLs-1)(ω2CsLs-1)2+ω2C2sR2 次级串联谐振-ω3M2[CsR2(ω2CsLs-1)+Ls]R2(ω2CsLs-1)2+ω2L2S 次级并联谐振] (5)
当角频率为1/[LSCs]时,次级线圈的等效阻抗[Zs]为纯阻性,初级线圈传递到次级线圈的能量均为有功功率。
4 结语
为了简化无人机充电模式,本文提出了一种无人机无线充电平台。首先对比了三种无线充电方案,并对充电平台的特征进行分析,发现无线电能传输具有三个特征:弱耦合、动态负载及动态互感。最后,对充电线圈的互感耦合理论进行重点分析,归纳无人机无线充电所表现出来的特征。
参考文献:
[1]边俊,潘庭龙.谐振式无线电能传输系统线圈优化与实验验证[J].电力电子技术,2019(3):38-41.
[2]朱韬.基于无线充电技术的无人机长续航方案[J].中国高新科技,2019(5):61-63.
[3]张红生,田晓威,刘忠诚,等.无人机无线传能技术[J].无人系统技术,2018(2):49-54.
[4]赵昕.基于无线电能传输模式的无人机悬停无线充电技术研究[D].重庆:重庆大学,2015.
[5]马秀娟,武帅,蔡春伟,等.应用于无人机的无线充电技术研究[J].电机与控制学报,2019(8):1-9.
猜你喜欢
电脑知识与技术(2016年28期)2016-12-21
新教育时代·教师版(2016年27期)2016-12-06
农机使用与维修(2016年10期)2016-11-10
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
企业导报(2016年9期)2016-05-26
