船舶用自动控制智能辅助系统设计
2019-09-10 07:22靳辉
科学导报·科学工程与电力 2019年39期
靳辉
【摘 要】随着我国航运事业的发展和计算机信息、网络、集成电路技术上的突破,船舶控制系统也日趋智能化。原有技术采用的PLC等通用控制器在结构简化、实时性、安全性等方面已不能满足日益发展的自动控制智能系统的技术要求。数字信号处理器DSP是一种高速专用微处理器,其精度高、可靠性好、实时性强,可以为机舱自动化控制辅助系统提供高效、可靠的平台。为了确保船舶的安全与快速通信,高智能化的船舶需要传输快、传送量大的通讯方式及实时监测的嵌入式系统。基于现场总线的CAN技术在实时监测具备较强的优势。
【关键词】船舶;自动化控制;智能辅助
本文应用的系统主要由两部分组成:基于DSP/F28335设计的下位机控制系统和上位机控制系统。其中,在下位机系统的DSP控制器中,使用变论域模糊PID控制优化控制效果,并将DSP与CAN总线相结合,实现控制系统的实时通讯和控制,使船舶机舱自动化系统的可靠性、实时性能够得到较大的提高。
1 系统总体结构及算法
1.1 总体结构
本文针对船舶用自动控制智能辅助系统设计了一种网络构架——基于以太网-CAN总线的控制网络。在此,将主柴油机子系统作为系统结构的被控对象,同时提供其他接口以便其他控制系统使用。柴油机子系统与船舶其他子系统的输入量有:DSP/F28335控制器的PWM控制量信号和上位机操作界面设置的控制量,他们分别由DSP控制器的CAN接口和Any CAN节点的DO接口送入。而输出量有:柴油机子系统和其他子系统的过程参数与给上位机反馈设备控制量,他们分别通过Any CAN节点的DI接口和DSP控制器的CAN接口传送到CAN总线。CAN总线再通过CANET网关传输到船舶集控系统,集控室工作人员可以在上位机操作界面对传送回来的参数进行实时监测。上位机对柴油机子系统的转速控制通过DSP控制器实现,设定的转速也通过上位机操作界面完成。DSP根据控制算法计算出控制量,并输出,来驱动PWM作动器及电机,最终实现柴油机转速控制。整个CAN网络以CANNET为主站,Any CAN和DSP为从站。
1.2 算法实现
柴油机子系统的正常工作主要是通过压气机、中冷器和扫气箱控制子系统的进气量,等到气缸内的燃油燃烧做功而发出扭矩;柴油机的排气管中具有能量趋势的涡轮做功,带动压气机工作。本文基于柴油机子系统的原理,设计了仿真实验平台,其特点为:柴油机子系统的各个系统进行数学模型的简化处理,去掉繁琐复杂的计算,只考虑输入输出的效果和过程的状态变量。
柴油机子系统仿真框图,如图1所示。其中,mac 為流入扫气箱的空气流量;Tac为流入扫气箱的气体温度;ma 为扫气流量;Ts为扫气箱内温度;ms为扫气箱内气体质量;Ps为扫气压力;mf 为流入气缸燃油平均质量流量;Mc为压气机产生的负载扭矩;mm为涡轮气体质量;MT 为涡轮工作时的扭矩;Tc为压气机输出端温度;Pc为压气机输出端压力;T n 为涡轮转速;TI 为增压器转子当量惯性转矩;mg为排气管内气体质量。压气机特性参数、涡轮特性曲线和热效率,均使用最小二乘法拟合得到。在仿真中,柴油机的转速通过变论域模糊PID控制,实质上是控制柴油机的喷油量便可达到控制柴油机子系统正常工作时的动作,即控制柴油机的转速。柴油机子系统的相关参数。
基于DSP/28335控制芯片,本文采用变论域模糊PID控制原理实现PID控制器参数的自适应优化,进一步完善了控制系统的性能。系统使用的是对被控对象进行在线辨识,根据相应的性能指标对PID控制器3个控制量(kp,ki,kd)进行实时调整,使用MATLAB/Simulink自带模糊控制系列工具实现。
2 系统实现结果
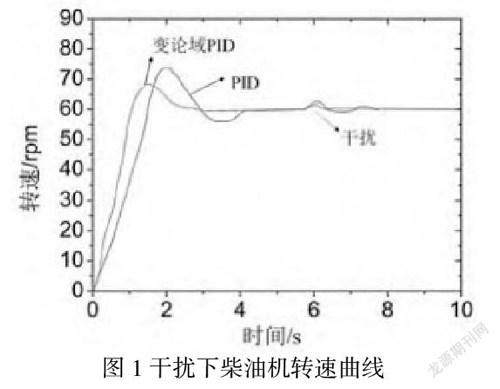
图1干扰下柴油机转速曲线
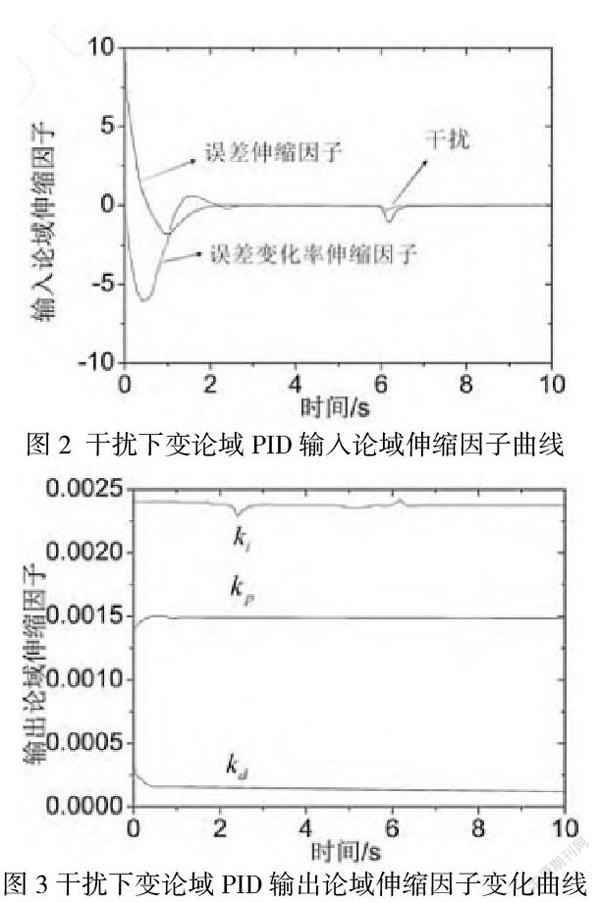
图2 干扰下变论域PID输入论域伸缩因子曲线
图3干扰下变论域PID输出论域伸缩因子变化曲线
图1是在设定柴油机转速为60 RPM的前提下,分别采用常规PID、变论域PID跟踪阶跃转速信号得到的转速控制仿真曲线。图2和图3为变论域PID输入输出论域伸缩因子变化曲线。在3 s左右,变论域PID控制下的柴油机转速到稳定值,而常规PID控制下的转速直到4 s后在稳定。转速稳定后,在6 s时输入供油端加入幅值为0.025 kg,脉宽为0.2 s的脉冲信号作为外部干扰。
整体上看,通过仿真分析得到,对比常规PID控制器的控制效果,对同一个被控对象:船舶柴油机子系统,使变论域模糊PID控制的控制性能明显地体现出来。通过对输入变量加入基于函数模型的伸缩因子的方式,得到的控制效果是响应速度更快、超调更小、鲁棒性也更强,取得了较好的效果。尤其是相对于常规PID控制,在自适应力和抗干扰方面均有着明显优越性。
3 结束语
本文在了解当前船舶机舱自动化智能辅助系统的研究现状后,以实时性强、传输量大的 CAN 总线技术为通讯手段,开发了基于 DSP/F28335 控制芯片的船舶用自动化智能辅助系统。并在系统的实时混合仿真平台上进行相关的干扰实验,对比了基于传统PID 控制器系统的控制效果。实验表明,使用变论域模糊 PID 控制算法的 DSP 控制器,大幅度提高了船舶用自动智能控制辅助系统的实时性、抗干扰性和自适应性。
参考文献:
[1]柳晨光,初秀民,谢朔,等.船舶智能化研究现状与展望[J].船舶工程,2016(3):77-84.
[2]冯发旗,邹颖霄.基于物联网的海关三位一体船舶监管体系研究与实现[J].现代电子技术,2014(6):83-87.
[3]黄鹏.基于DSP的船舶机舱自动化系统控制器研究[D].重庆:重庆大学,2010.
[4]陈和洲.船舶嵌入式 CAN 总线控制系统设计[J].舰船科学技术,2016(18):70-72.
(作者单位:天津市斯莱顿电子有限公司)
猜你喜欢
装备维修技术(2022年7期)2022-07-01
科学与财富(2021年35期)2021-05-10
智富时代(2019年3期)2019-04-30
智富时代(2019年3期)2019-04-30
伙伴(2018年1期)2018-05-14
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
航运交易公报(2015年38期)2015-12-01