
三栖四旋翼模型与PID控制设计研究
2019-09-10 07:22张鹏何振鹏张永浩张志远迟炳哲
河南科技 2019年7期
关键词:建模
张鹏 何振鹏 张永浩 张志远 迟炳哲


摘 要:本文在三栖四旋翼机体结构和飞行原理的基础上,利用牛顿-欧拉法对无人机进行动力学受力分析,建立相应数学模型,通过四旋翼无人机的数学模型分析,设计了比例-积分-微分(PID)控制器,利用MATLAB进行仿真验证。
关键词:三栖四旋翼;建模;PID;Simulink
中图分类号:V249.1 文献标识码:A 文章编号:1003-5168(2019)07-0083-03
Abstract: Based on the structure and flight principle of the triphibious quadruple-rotor airframe, the dynamic force analysis of the UAV was carried out by Newton-Euler method, and the corresponding mathematical model was established. Through the analysis of the mathematical model of the quadruple-rotor UAV, the proportional-integral-differential (PID) controller was designed and verified by simulation with MATLAB.
Keywords: three-habitat four- rotor uav; modeling; PID; Simulink
建立精确的无人机模型对控制算法的实际应用具有重大意义。本文把包括机体、电机以及螺旋桨在内的所有硬件都看成刚体系统,在SolidWorks软件中建立X型四旋翼无人机实体模型,从中获得惯性参数。从动力学原理出发,建立较为全面的无人机数学模型,并设计PID控制系统,实现对四旋翼无人机位置、姿态控制。
1 机体结构动力模型与飞行原理
机体结构动力模型拥有3种不同的运动形式,能够实现水陆空三栖运动,其模型图如图1所示,主要的动力元件来源于4个旋翼。该模型由于要适应水中的运动,所以将四旋翼的主体部分改成船体造型,但是由于增加了翼臂、电机、旋翼这些结构之后,使整体结构重心上移,导致其在水中运动时受力很难达到平衡。因此,该模型在主体部分两侧增加了平衡舱体,使无人机在水中或在陆面运动时能够维持平衡。为减轻机体重量,舱体材料用泡沫塑料,在每个舱体前后各加了一个橡胶轮(减少在地面降落时产生的冲击和在地面运动时受的变载),以便在陆上行驶。
1.1 空中飞行
无人机拥有4个旋翼且具有对称性,其结构简图如图2所示。飞行器控制机体的实时姿态和位置通过4个电机转速和1个舵机转角来实现的,电机转速的改变会改变每个旋翼的升力,而舵机转角改则决定了电机3、4在X轴方向上的投影牵引力[Fa3]和[Fa4]的大小以及两电机在各自位置上产生升力的大小。
无人机拥有5种不同的飞行方式:垂直运动、偏航运动、俯仰运动、横滚运动以及前后运动。相对于传统四旋翼无人机,本设计的亮点在于优化了无人机的前后运动。
传统的四旋翼无人机实现前后运动是通过改变4个电机转速,使飞行器发生一定程度的倾斜,从而使旋翼拉力产生水平分量实现无人机的前后运动。这对无人机的稳定性会产生很大影响,且对于其使用也会产生很大的局限性。对于优化后的无人机来说,要实现前后运动则不需要使机体发生倾斜,如图2、图3所示,在舵机驱动下使3、4电机向X轴方向倾斜,从而使3、4电机上的旋翼产生水平拉力,实现无人机的前后运动,在此过程中保证了机体稳定性。
1.2 水中运动
四旋翼无人机在水中运动时由机体下方的两个仓体(舱体下面是塑料泡沫,可以有效减轻机体重量)在水中产生的浮力来平衡船体重力,使无人机在水中Z轴方向达到平衡。通过设计使此时无人机的重心位于液面下,这样避免了无人机在前后运动或偏转过程中发生倾覆的可能。在水中运动时的动力来源于4个旋翼,运动原理与空中飞行相同。
1.3 陆面行驶
四旋翼无人机在每个舱体下方的前后位置都装有2个橡胶轮,保证无人机在陆面上平稳行驶。其动力来源于4个旋翼,运动原理与空中飞行相同。
2 建立数学模型
2.1 模型说明
针对四旋翼无人机,本文做如下假设和说明。本研究所用的导航坐标系(用N表示)是地理坐标系,原点选在无人机所在位置;Z轴沿当地椭球的法线指向天空;X轴在当地水平面内沿着当地经纬度线指向东;Y轴沿着当地子午线方向指向北,满足右手定则。无人机机体坐标系用B表示,将无人机的质心作为机体坐标系的原点;X轴沿质心指向1、2电机质心连线的几何中心;Y轴沿质心指向2、3电机质心连线的几何中心,满足右手定则。
为准确的确定四旋翼无人机的姿态,欧拉角定义如下:①俯仰角[θ]:B系与N系在OX轴方向的夹角;②横滚角[φ]:B系与N系在OY轴方向的夹角;③偏航角[Ψ]:B系与N系在OX轴以及N系在OXY平面上的投影夹角。
2.2 无人机的受力分析
空气阻力:[f=γtvb],[γt]为平动空气阻力系数,方向和v的方向相反。
空气阻力矩:[τ=γrΩb],[γr]是转动空气阻力系数,方向和[Ωb]的方向相反。
螺旋桨推力:[Ftj=kw2j],j=1,2,3,4;k是螺旋桨升力系数,方向指向Z轴正方向。
螺旋槳阻力矩:[Ftj=αw2j],j=1,2,3,4;[α]是螺旋桨阻力系数,方向和螺旋桨角速度方向相异。
重力:Mg方向指向Z轴负方向。
2.3 四旋翼无人机的数学模型
有牛顿第二定理得到平动方程:
[xyz=RM00j=14kw2j-1MRγtRTv i-000] (1)
式中:[RTv i]表示B系下的速度;[γtRTv i]表示B系下的平动空气阻力大小;[RγtRTv i]表示N系下的平动空气阻力大小。
由角动量定理及哥氏定理得转动方程:
[Ωb=-j=14I-1ΩbIcrWbj+I-1IcrWBJ-I-1ΩbIΩb+I-1Mb+δM] (2)
合外力矩:
[Mb=-γr0 -r qr 0 -p-q p 0+0.5ak-w21+w22+w23-w240.5ak-w21-w22+w23+w24αw21-w22+w23-w24](3)
电机角速度矢量:
[Wb1=0 0 -W1;Wb2=0 0 -W2;Wb3=0 0 -W3;Wb4=0 0 -W4] (4)
2.4 模型参数
通过在SolidWorks建立无人机模型,通过SolidWorks软件计算得到无人机质量、惯性参数,其他参数参考文献[1-5]取合理质,如表1所示。
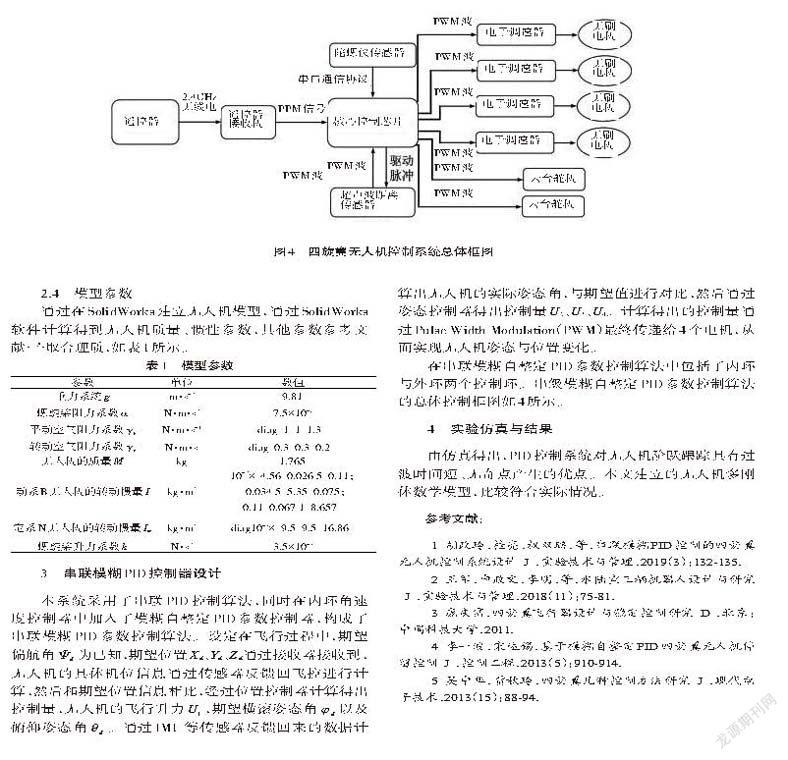
3 串联模糊PID控制器设计
本系统采用了串联PID控制算法,同时在内环角速度控制器中加入了模糊自整定PID参数控制器,构成了串联模糊PID参数控制算法。设定在飞行过程中,期望偏航角[Ψd]为已知,期望位置Xd、Yd、Zd通过接收器接收到,无人机的具体机位信息通过传感器反馈回飞控进行计算,然后和期望位置信息相比,经过位置控制器计算得出控制量,无人机的飞行升力[U1],期望横滚姿态角[φd]以及俯仰姿态角[θd]。通过IMU等传感器反馈回来的数据计算出无人机的实际姿态角,与期望值进行对比,然后通过姿态控制器得出控制量U2、U3、U4。计算得出的控制量通过Pulse Width Modulation(PWM)最终传递给4个电机,从而实现无人机姿态与位置变化。
在串联模糊自整定PID参数控制算法中包括了内环与外环两个控制环。串级模糊自整定PID参数控制算法的总体控制框图如4所示。
4 实验仿真与结果
由仿真得出,PID控制系统对无人机阶跃跟踪具有过渡时间短、无奇点产生的优点。本文建立的无人机多刚体数学模型,比较符合实际情况。
参考文献:
[1]胡改玲,桂亮,權双璐,等.串联模糊PID控制的四旋翼无人机控制系统设计[J].实验技术与管理,2019(3):132-135.
[2]王军,申政文,李明,等.水陆空三栖机器人设计与研究[J].实验技术与管理,2018(11):75-81.
[3]庞庆霈.四旋翼飞行器设计与稳定控制研究[D].北京:中国科技大学,2011.
[4]李一波,宋述锡.基于模糊自整定PID四旋翼无人机停留控制[J].控制工程,2013(5):910-914.
[5]吴中华,贾秋玲.四旋翼几种控制方法研究[J].现代电子技术,2013(15):88-94.
猜你喜欢
中学生学习报(2022年24期)2022-05-18
数理化解题研究·综合版(2021年11期)2021-12-22
小学教学研究(2021年5期)2021-09-29
计算机与网络(2021年6期)2021-06-01
课程教育研究(2021年27期)2021-04-13
初中生世界·九年级(2020年2期)2020-04-10
