
基于模糊理论的某型电液复合舵机常见故障分析
2019-09-10 07:22:44侯亚鹏胡宜春王清山王晓杰
河南科技 2019年7期
侯亚鹏 胡宜春 王清山 王晓杰
摘 要:某型飞机的电液复合舵机在维修过程中,故障模式多,难以进行危害水平分析。将模糊分析综合评判引入修理过程,列出常见电液复合舵机故障的FMECA表,并在此基础上进行FMECA模糊分析,得出舵机常见故障模型的综合危害评价,为电液复合舵机维修提供了有益参考,使修理工作更加具有预判性和针对性。
关键词:电液复合舵机;模糊分析;危害评价
中图分类号:TP277 文献标识码:A 文章编号:1003-5168(2019)07-0044-03
Abstract: In the maintenance process of an aircraft's electro-hydraulic composite actuator, there are many failure modes. It is difficult to analyze the hazard level. Introducing fuzzy analysis comprehensive evaluation into repair process, the FMECA table of the common electro-hydraulic composite actuator failure was listed, and based on FMECA fuzzy analysis, it was carried out to obtain the comprehensive hazard evaluation of the common fault model of the actuator, which provided a useful reference for the maintenance of the electro-hydraulic composite actuator, making the repair work more predictive and pertinent.
Keywords: aircraft's electro-hydraulic composite actuator;fuzzy analysis;hazard evaluation
某型电液复合舵机是某型飞机飞行控制系统中副翼操纵系统的配套产品,其主要功能是作为操纵副翼及自动驾驶状态时副翼操纵的执行机构,并且能够和飞控计算机形成自动驾驶闭环控制系统,利用舵机上的调校机构参与自动驾驶仪工作。同时,主滑阀卡死的话由副阀接替工作,副阀工作后切断自动驾驶仪的信号。
舵机采用双腔双系统供压,主要由助力器、舵机和复合摇臂三部分组成,进而分成三种工作状态,即助力器工作状态、舵机工作状态、复合工作状态。在飞行器整个空中方向控制上,该型舵机起着重要作用,所以,在地面修理中提高可靠性很有必要。
1 基于FMECA的电液复合舵机故障模式
故障模式、影响及危害性分析(Failure Medes, Effect and Criticality Analysis,FMECA),是分析系统的每个组成部件在单一因素下可靠性的方法,根据系统中发生的所有故障模型对系统产生的影响和后果,并且按照每个故障模型的严重程度及发生的概率进行分类,找出故障的原因,制订排除方案。
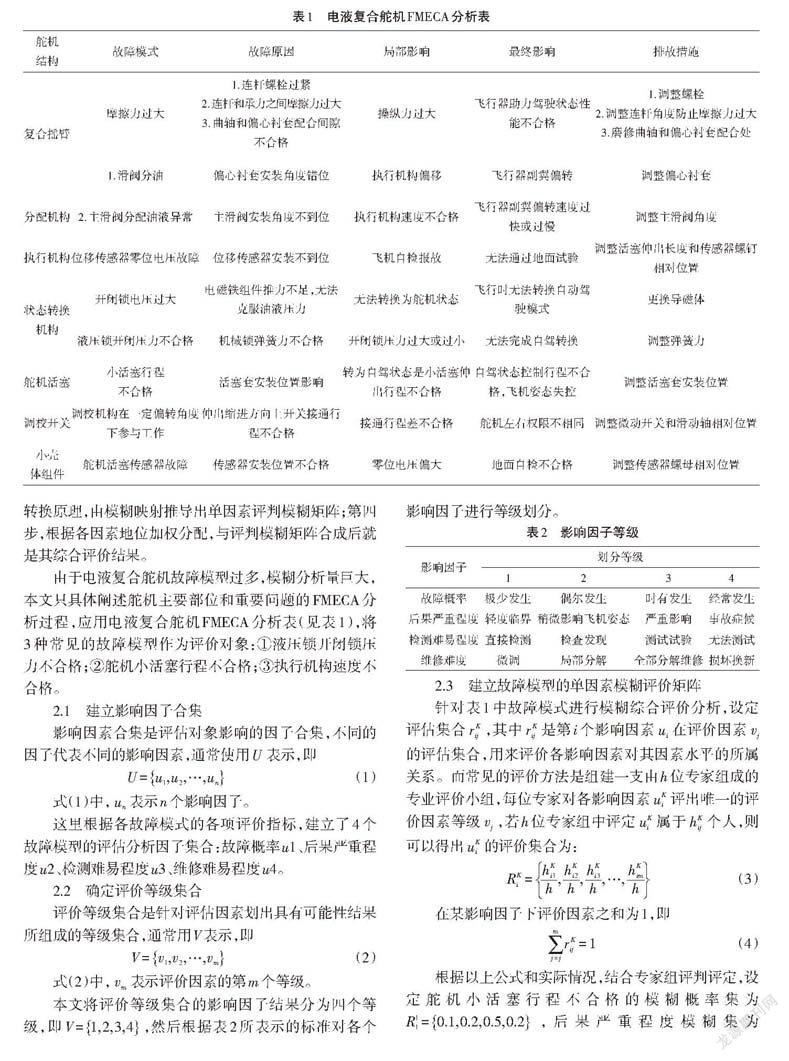
根据电液复合舵机的结构特点,可将其分为复合摇臂、分配机构、执行机构、状态转换机构、舵机活塞、调校开关、副阀工作切断开关、小壳体组件、电液伺服阀等,这里给出该型舵机故障模式及影响分析表(见表1)。
由表1可知,电液复合舵机的故障模式复杂多样,相同故障现象的故障成因各有不同,同一原因也可能造成不同的故障,并且其排故措施也各不相同。确立的评价指标具有不确定性,不能用来对各故障模式进行精确的定性和定量分析。所以,借用FMECA对电液复合舵机故障模型进行综合评价。
2 基于模糊分析理论的电液复合舵机的故障分析
应用模糊综合评价的数学模型,主要有四个步骤:第一步,确定评价因素集[U=u1,u2,…un];第二步,根据各因素划分评价等级集合[V=v1,v2,…vm];第三步,根据模糊转换原理,由模糊映射推导出单因素评判模糊矩阵;第四步,根据各因素地位加权分配,与评判模糊矩阵合成后就是其综合评价结果。
由于电液复合舵机故障模型过多,模糊分析量巨大,本文只具体阐述舵机主要部位和重要问题的FMECA分析过程,应用电液复合舵机FMECA分析表(见表1),将3种常见的故障模型作为评价对象:①液压锁开闭锁压力不合格;②舵机小活塞行程不合格;③执行机构速度不合格。
2.1 建立影響因子合集
影响因素合集是评估对象影响的因子合集,不同的因子代表不同的影响因素,通常使用[U]表示,即
[U=u1,u2,…,un] (1)
式(1)中,[un]表示n个影响因子。
这里根据各故障模式的各项评价指标,建立了4个故障模型的评估分析因子集合:故障概率u1、后果严重程度u2、检测难易程度u3、维修难易程度u4。
2.2 确定评价等级集合
评价等级集合是针对评估因素划出具有可能性结果所组成的等级集合,通常用V表示,即
[V=v1,v2,…,vm] (2)
式(2)中,[vm]表示评价因素的第m个等级。
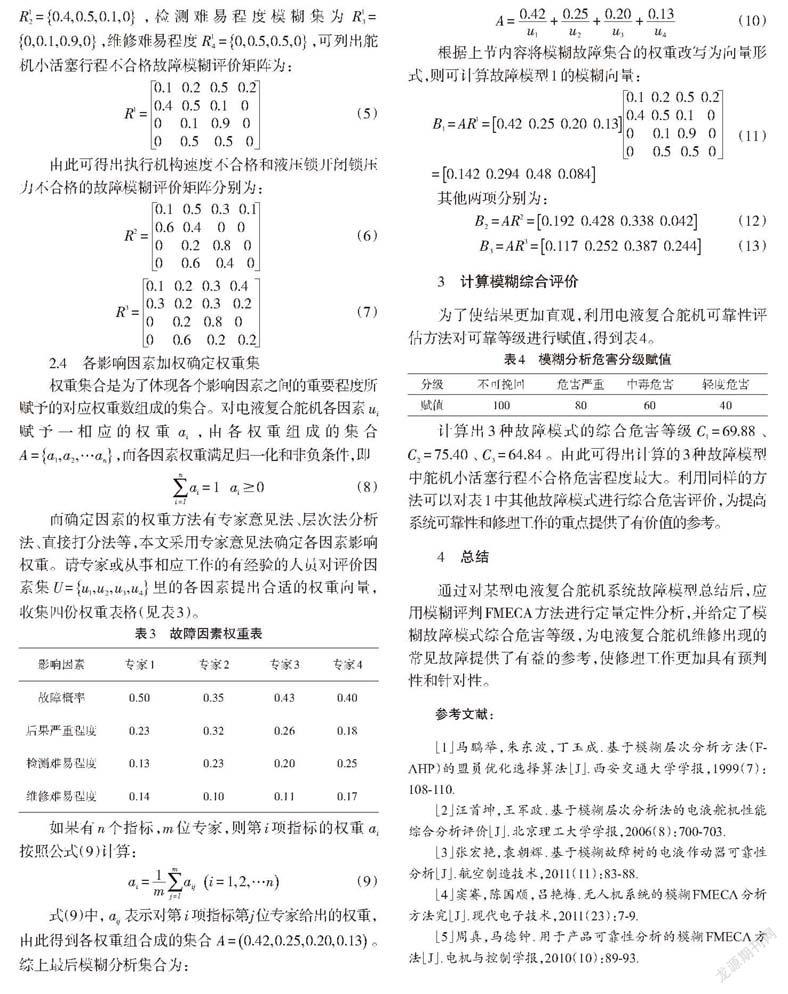
本文将评价等级集合的影响因子结果分为四个等级,即[V=1,2,3,4],然后根据表2所表示的标准对各个影响因子进行等级划分。
2.3 建立故障模型的单因素模糊评价矩阵
针对表1中故障模式进行模糊综合评价分析,设定评估集合[rKij],其中[rKij]是第i个影响因素[ui]在评价因素[vj]的评估集合,用来评价各影响因素对其因素水平的所属关系。而常见的评价方法是组建一支由h位专家组成的专业评价小组,每位专家对各影响因素[uKi]评出唯一的评价因素等级[vj],若h位专家组中评定[uKi]属于[hKij]个人,则可以得出[uKi]的评价集合为:
[RKi=hKi1h,hKi2h,hKi3h,…,hKimh] (3)
在某影响因子下评价因素之和为1,即
[j=jmrKij=1] (4)
根据以上公式和实际情况,结合专家组评判评定,设定舵机小活塞行程不合格的模糊概率集为[R11=0.1,0.2,0.5,0.2],后果严重程度模糊集为[R12=0.4,0.5,0.1,0],检测难易程度模糊集为[R13=][0,0.1,0.9,0],维修难易程度[R14=0,0.5,0.5,0],可列出舵机小活塞行程不合格故障模糊评价矩阵为:
[R1=0.1 0.2 0.5 0.20.4 0.5 0.1 00 0.1 0.9 00 0.5 0.5 0] (5)
由此可得出执行机构速度不合格和液压锁开闭锁压力不合格的故障模糊评价矩阵分别为:
[R2=0.1 0.5 0.3 0.10.6 0.4 0 00 0.2 0.8 00 0.6 0.4 0] (6)
[R3=0.1 0.2 0.3 0.40.3 0.2 0.3 0.20 0.2 0.8 00 0.6 0.2 0.2] (7)
2.4 各影响因素加权确定权重集
权重集合是为了体现各个影响因素之间的重要程度所赋予的对应权重数组成的集合。对电液复合舵机各因素[ui]赋予一相应的权重[ai],由各权重组成的集合[A=a1,a2,…an],而各因素权重满足归一化和非负条件,即
[i=lnai=1 ai0] (8)
而確定因素的权重方法有专家意见法、层次法分析法、直接打分法等,本文采用专家意见法确定各因素影响权重。请专家或从事相应工作的有经验的人员对评价因素集[U=u1,u2,u3,u4]里的各因素提出合适的权重向量,收集四份权重表格(见表3)。
如果有n个指标,m位专家,则第i项指标的权重[ai]按照公式(9)计算:
[ai=1mj=lmaij i=1,2,…n] (9)
式(9)中,[aij]表示对第[i]项指标第j位专家给出的权重,由此得到各权重组合成的集合[A=0.42,0.25,0.20,0.13]。综上最后模糊分析集合为:
[A=0.42u1+0.25u2+0.20u3+0.13u4] (10)
根据上节内容将模糊故障集合的权重改写为向量形式,则可计算故障模型1的模糊向量:
[B1=AR1=0.42 0.25 0.20 0.130.1 0.2 0.5 0.20.4 0.5 0.1 00 0.1 0.9 00 0.5 0.5 0=0.142 0.294 0.48 0.084] (11)
其他兩项分别为:
[B2=AR2=0.192 0.428 0.338 0.042] (12)
[B3=AR3=0.117 0.252 0.387 0.244] (13)
3 计算模糊综合评价
为了使结果更加直观,利用电液复合舵机可靠性评估方法对可靠等级进行赋值,得到表4。
计算出3种故障模式的综合危害等级[C1=69.88]、[C2=75.40]、[C3=64.84]。由此可得出计算的3种故障模型中舵机小活塞行程不合格危害程度最大。利用同样的方法可以对表1中其他故障模式进行综合危害评价,为提高系统可靠性和修理工作的重点提供了有价值的参考。
4 总结
通过对某型电液复合舵机系统故障模型总结后,应用模糊评判FMECA方法进行定量定性分析,并给定了模糊故障模式综合危害等级,为电液复合舵机维修出现的常见故障提供了有益的参考,使修理工作更加具有预判性和针对性。
参考文献:
[1]马鹏举,朱东波,丁玉成.基于模糊层次分析方法(F-AHP)的盟员优化选择算法[J].西安交通大学学报,1999(7):108-110.
[2]汪首坤,王军政.基于模糊层次分析法的电液舵机性能综合分析评价[J].北京理工大学学报,2006(8):700-703.
[3]张宏艳,袁朝辉.基于模糊故障树的电液作动器可靠性分析[J].航空制造技术,2011(11):83-88.
[4]窦赛,陈国顺,吕艳梅.无人机系统的模糊FMECA分析方法究[J].现代电子技术,2011(23):7-9.
[5]周真,马德钟.用于产品可靠性分析的模糊FMECA方法[J].电机与控制学报,2010(10):89-93.
