
汽车悬架优化综述
2019-09-10 07:22:44郑迎华
河南科技 2019年7期
关键词:优化
郑迎华

摘 要:本文针对含有球铰和衬套的汽车悬架控制臂优化设计进行了分析综述,确定了控制臂优化设计模型。根據分析,在采用了基于拓扑学知识的综合框架优化技术的悬架控制臂设计后,使控制臂的优化方向更为准确、工况载荷计算更加精确。采用该设计思路可以保障汽车行驶的安全性,从而提高驾驶者的行驶质量。
关键词:汽车悬架;控制臂;优化;参数
中图分类号:U463.33 文献标识码:A 文章编号:1003-5168(2019)07-0139-03
Abstract: This paper summarized the optimum design of automobile suspension control arm with spherical hinges and bushes,determined the optimal design model of the control arm. According to the analysis, after the design of the suspension control arm based on the comprehensive framework optimization technology based on the knowledge of topology, the optimization direction of the control arm was more accurate and the load calculation was more accurate. This idea can ensure the safety of driving and provide better driving quality for drivers.
Keywords: automobile suspension; control arm; optimization; parameter
控制臂作为汽车悬架系统中的一个十分重要的安全性与功能性部件,设计要求十分严格。控制臂的参数对汽车行驶安全与操控舒适度具有十分重要的作用。要满足上述要求,控制臂自身的物理参数包括强度、刚度等需要精确设计及优化。控制臂通过物理连接机制与汽车车身连接,轮毂端通过球铰与轮毂相连接,车架端通过球铰与橡胶衬套与车架连接。在分析控制臂参数设计与性能的基础上,球铰和衬套对控制臂的影响还应该考虑相关参数的应用条件。Demirdogen C等人[1]在研究控制臂轻量化设计的模型构建过程中并没有考虑连接在控制臂上的球铰和衬套,而是以其连接面作为分析界限,这样的设计并不能真实反映实际中增加的有效载荷,不能为驾驶者提供更好的行驶质量。Xintian L等人[2]的研究表明,不同维度的橡胶衬套的参数对悬架的影响也不尽相同,橡胶衬套的轴向刚度及扭转刚度对悬架性能影响不显著,而橡胶衬套的径向刚度则对悬架性能影响较大。
本文在论述控制臂优化设计时,充分考虑了实际作用在控制臂上的工况载荷,包含了球铰和衬套的综合系统在受外力作用下产生的位移情况,较之前的设计偏大。经过对比分析该综合系统与不包含球铰和衬套的模型在优化与计算上的差异性可以看出,本文的综合模型更加符合实际的优化设计。
1 控制臂的优化设计
1.1 确定可承受载荷
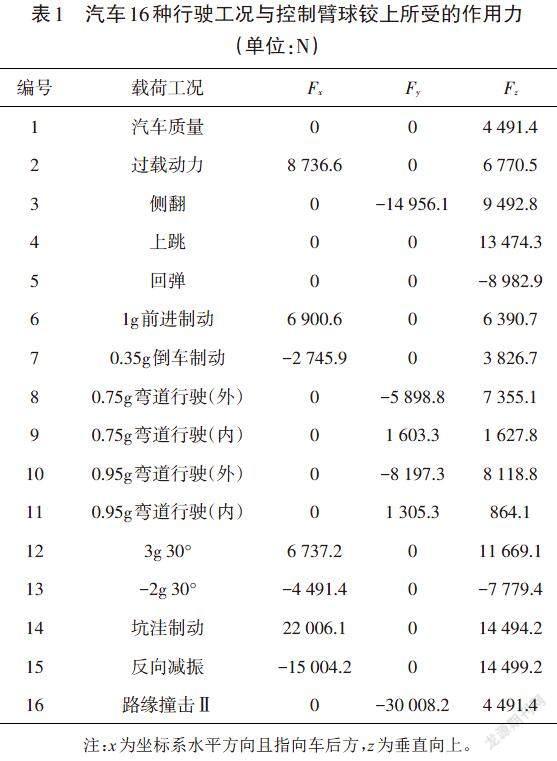
考虑到汽车行驶工况复杂化、多样化的实际情况,企业对汽车进行动力学实验分析测试时应考虑并计算不同工况下控制臂连接两端的球铰和轮毂受到的作用力,如表1所示。表1的工况和载荷数据的大小来源于汽车主机厂对悬架控制臂优化方案的输入数据。对此数据进行系统性、科学性分析可得,采用基于拓扑优化的方法进行计算载荷工况的数值,最后可得到可用于控制臂优化的载荷情况[3]。
1.2 控制臂设计的合理范围
控制臂的合理运动范围应该包含控制臂与球铰和衬套的连接部位和合理变动区间,包含控制臂设计的合理运动范围但不含球头与衬套的设计在内。控制臂总成的有限元模型建立控制臂球铰的简化模型可以用3个刚性单元模拟,为了模拟真实情况下控制臂绕球头的旋转运动,刚性单元的设计长度很短。相关单位按照实际对衬套结构进行模拟,包含橡胶材料的控制臂总成有限元,将其作为一般控制臂连接面为界限的控制臂模型。
2 控制臂的结构优化方案
控制臂有限元模型可以在一定的约束条件下采用相对密度法和固体各向同性材料惩罚模型(Solid Isotropic Material with Penalization,SIMP)法的控制臂优化方法。假设刚性单元相对密度的范围设定为0.01~1,惩罚因子设定为3,其工程最优化目标要保证控制臂悬架柔度最小。通过解释该问题,能够有效对控制臂结构进行优化设计分析,从而有效节约材料成本且避免在特定方向上的所受应力不足或过大的情况。充分满足加工工艺需求,正确选择拔模方向,能够直接影响最终工程优化结果,这样一来,控制臂在外力作用下产生的较大位移能在惯性释放作用下保证所受应力处在合理、理想、可接受的范围内。
2.1 控制臂的优化效果
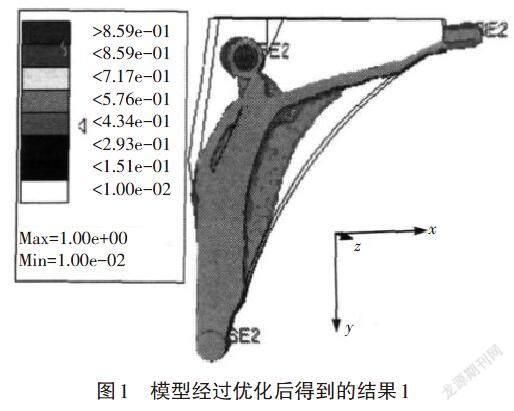
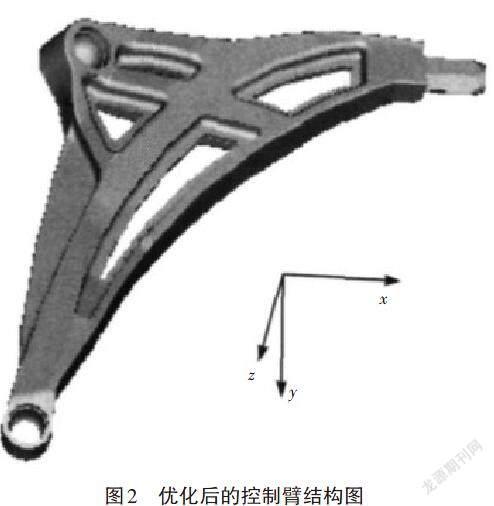
模型分别经过优化后得到结果如图1所示。从中可以看出,没把球铰和衬套考虑在内的前期模型得到的优化结果并不能反映真实驾驶使用工况,不贴合实际,不实用。继续优化得出的结果如图2所示。图2的优化设计方案,既考虑了球铰和衬套相结合的综合运用系统,也满足了设计和量产制造工艺要求。
2.2 控制臂的性能
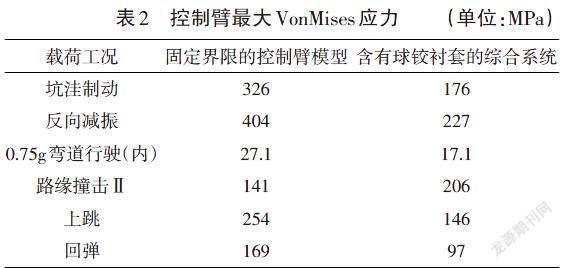
通过对优化后的控制臂结构的承受应力、刚度和约束固有频率进行系统性、科学性的统计分析可知,两组模型在本文讨论的6种工况下,控制臂的VonMises应力结果不同,如表2所示。
控制臂设计所采用的实际工程材料的屈服强度为275MPa。从表2可以看出,最大应力数据,含有球铰和衬套的综合系统应力均在合理可接受的范围内。不含球铰和衬套的固定界限控制臂模型不符合理论及现实设计要求。控制臂的固定频率对悬架系统稳定性、驾驶质感和驾驶员回馈等均有较大影响。因此,企业在控制臂设计优化中应该充分考虑控制臂自身结构,经过优化后的控制臂固有频率可见表3。由表3可以看出,控制臂的固有频率在约束状态达到了1阶350Hz,在自由状态达到了1阶800Hz的一般设计要求。
为了保障汽车安全、实际使用工况下的汽车行驶质感及驾驶员的回馈感受等,企业对控制臂的刚度设计也具有较高要求。在设计汽车控制臂刚度时应该参考固定界限模型,不加入球铰和衬套[4]。
3 设计优化结论
本文根据控制臂学术界及工业应用领域的经验,结合实际工况,设计建立了两组控制臂模型,根据优化结果确定了一组最优的包含球铰和衬套的综合系统模型,并采用先进的计算机仿真实验平台进行了仿真实验,然后结合实验结果的反馈进行了调整。此外,还根据固定界限模型科学、详细地论述了设计控制臂要求的参数及相关数据变量,真实反映了控制臂工况运行的实际情况。在采用基于拓扑学知识的综合框架优化技术的悬架控制臂设计后,控制臂的优化指向性更加准确、翔实,符合驾驶员对驾驶质感的追求,使工况载荷计算更加精确。采用该设计思路对汽车悬架控制臂系统进行系统性优化,可以保障汽车行驶的安全性,为驾驶者提供更好的行驶质量。
参考文献:
[1]Demirdogen C, Ridge J, Pollock P. Weight Optimized Design of a Front Suspension Component for Commercial Heavy Trucks[J].Advanced Materials Research,2012(4):212-216.
[2]Xintian L, Hu H, Jichang W, et al. Performance Analysis of Rear Rubber Bushing Stiffness of Lower Control Arm on Front Double Wishbone Independent Suspension[C]// International Conference on Computer Modeling & Simulation. IEEE,2010.
[3]赵清海,张洪信,朱智富,等.汽车悬架控制臂的可靠性拓扑优化[J].汽车工程,2018(3):313-319.
[4]王书贤,向立明,刘鹏,等.基于拓扑优化的某汽车悬架控制臂轻量化设计[J].轻工科技,2017(10):30-31.
猜你喜欢
房地产导刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材发展导向(2021年12期)2021-07-22 08:06:48
建材发展导向(2021年7期)2021-07-16 07:07:52
中学生数理化(高中版.高二数学)(2021年12期)2021-04-26 07:43:48
中学生数理化(高中版.高考数学)(2021年12期)2021-03-08 01:28:50
今日农业(2020年16期)2020-12-14 15:04:59
消费导刊(2018年8期)2018-05-25 13:20:08
家庭影院技术(2018年4期)2018-05-09 07:07:41
电子制作(2017年20期)2017-04-26 06:57:45
