
基于绝对标定的目标导引精度分析
2019-09-10 02:55宋丽琼王雪王云龙李永强丁帅
E动时尚·科学工程技术 2019年8期
宋丽琼 王雪 王云龙 李永强 丁帅
摘 要:本文对基于绝对标定方法的目标坐标转换进行了精度分析。首先对绝对标定的导引流程进行了分析,然后对流程中每个坐标转换步骤中所需的数据信息和转换方法进行了说明,最后通过对一条航路进行仿真,得到的仿真结果为工程应用提供了理论支撑。
关键词:绝对标定;目标导引
两个武器系统之间的目标导引方法有很多,但不论何种导引方法,传感器测量误差的客观因素使得目标导引存在误差,影响导引精度。本文对基于绝对标定的目标导引精度进行分析。
1 绝对标定的前提条件
指挥车发现目标的数据通过绝对标定导引给发射车。绝对标定所需的前提条件有:
1)指挥车和发射车的经度、纬度和高程;
2)指挥车和发射车的航向角、横滚角、纵摇角;
3)指挥车探测目标的方位角、高低角和距离。
2 绝对标定的导引流程
1)目标在指挥车车体坐标系下的球坐标转换到在指挥车车体坐标系下的直角坐标;
2)目标在指挥车车体坐标系下的直角坐标转换到在指挥车水平坐标系下的直角坐标;
3)目标在指挥车水平坐标系下的直角坐标通过绝对标定转换到在发射车水平坐标系下的直角坐标;
4)目标在发射车水平坐标系下的直角坐标转换到在发射车车体坐标系下的直角坐标;
5)目标在发射车车体坐标系下的直角坐标转换到在发射车车体坐标系下的极坐标。
3 坐标转换
1)指挥车体球坐标到指挥车直角坐标
目标在指挥车的车体极坐标:方位角,高低角,斜距离。在三维直角坐标系下,根据基本的三角公式和空间立体知识,可获得目标在指挥车车体直角坐标系下坐标。
2)指挥车体直角坐标到指挥车水平直角坐标
指挥车的车体姿态信息:航向角、横滚角、纵摇角。目标在指挥车车体直角坐标,通过相应坐标平面的旋转,获得目标在指挥车的水平直角坐标。
3)绝对标定
指挥车的位置信息:经度、纬度、高程;发射车的位置信息:经度、纬度、高程。通过经纬度到地心坐标系的转换,可获得指挥车在发射车的水平直角坐标。再根据上一步目标在指挥车的水平直角坐标,则可以获得目标在发射车的水平直角坐标。
4)发射车水平直角坐标到发射车体直角坐标
发射车的车体姿态信息:航向角、横滚角、纵摇角。该过程与2)过程相逆,可得到目标在发射车的车体直角坐标。
5)发射车体直角坐标到发射车体极坐标
该过程与1)过程相逆,可得到目标在发射车的车体极坐标:方位角,高低角,斜距离。
4 导引精度仿真与分析
通过2,可看出基于绝对标定的目标导引需要的测量装置有:发射车和指挥车的定位装置和姿态测量装置。
假定指挥车和发射车的真实姿态信息均为0,指挥车的位置(105.64359443,38.75940665,1444.9),发射车的位置(105.642677,38.758858,1445)。
目标航路的特征为:起始点为(5000,5000,1000),速度为(-80,-60,0,)。
情况一:当经纬度的精度为1″,高程的精度1m,姿态的精度3mil;指挥车探测目标的角精度3mil,距离精度5m。
情况二:当经纬度的精度为5″,高程的精度5m,姿态的精度3mil;指挥车探测目标的角精度3mil,距离精度5m。
情况三:当经纬度的精度为1″,高程的精度1m,姿态的精度10mil;指挥车探测目标的角精度3mil,距离精度5m。
情况四:当经纬度的精度为1″,高程的精度1m,姿态的精度3mil;指挥车探测目标的角精度10mil,距离精度15m。
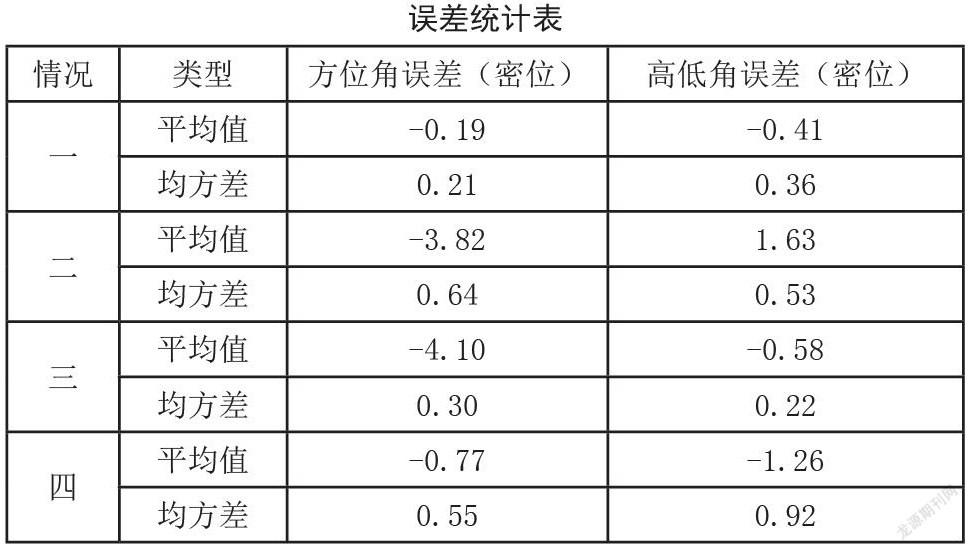
根据上述四种情况,对方位角、高低角的平均误差和绝对误差进行统计,如下表。
情况二与情况一对照,只有武器平台的经纬度高程测量精度不同,可看出情况二的目标方位角和高低角的误差均值相比情况一要大,而该误差值基本可看作系统误差。情况三与情况一对照,只有武器平台的姿态测量精度不同,可看出情况二的目标方位角的误差均值相比情况一要大,而该误差值基本可看作系统误差。情况四与情况一对照,方位角和高低角的均值大体相同,均方差变大;斜距离的均方差变化大。
5 总结
本文对基于绝对标定的目标导引精度进行了仿真分析,可以得武器系统的经纬度高程测量精度和姿态测量精度在一定范围内,方位角和高低角的误差均值基本为固定值,可通过前期试验进行系统误差修正,从而提高导引精度;武器系统的搜索探测精度会影响目标导引精度的稳定性。这些结论为工程目标导引的应用提供了理论支撑,并具有一定的指導作用。
参考文献
[1]赵凯,杨维,石德乾,李才葆.自行装备间目标指示与导引精度分析[J].火炮发射与控制学报,2009.
[2]鲍建宽.坐标转换的方法及应用[J].现代测绘,201509.
[3]梁月吉,谢劭峰,庞光峰.基于Matlab的坐标转化程序设计[J].地理空间信息,201402.
[4]宋丽琼,李永强,张建伟,王雪,晋超琼.基于反觇标定的目标导引精度分析[j].科技新时代,201808.
[5]罗泳.浅谈平面坐标系间的转换及程序设计[J].江西测绘,201504.
作者简介:
宋丽琼,1989年8月,女,汉族,山西长治人,工程师,现工作于北方自动控制技术研究所,研究方向为武器系统仿真分析。
猜你喜欢
科学与生活(2021年24期)2021-12-06
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
科技资讯(2018年10期)2018-10-26
智富时代(2018年7期)2018-09-03
智富时代(2018年7期)2018-09-03
新课程·中旬(2017年7期)2017-08-13
新课程·中旬(2017年1期)2017-03-27
环球时报(2016-08-01)2016-08-01
计算机辅助工程(2012年5期)2012-11-21
