
P2混动汽车传动系统的数学建模方法
2019-09-10 22:12:11刘剑黄良宇
大众汽车·学术版 2019年8期
刘剑 黄良宇

摘 要 针对P2混动汽车的混合动力系统,为计算整车系统所需的扭矩、转速,功率并研究车辆的油耗,本文根据计算时动力流动的方向,建立了后向模型以及前向模型计算模型。此外还对传动系统中的关键零部件进行了数学建模。在车辆研发的技术规划阶段可利用该模型进行整车的驱动策略以及燃油经济性的分析。
关键词 P2构型;混合动力汽车;传动系统;数学模型
A Mathematical Modeling Method of P2 Hybrid Vehicle Transmission System
LiuJian, HuangLiangYu
GAC Engneering, Guangdong Guangzhou, 511400
Abstract For the hybrid power system of P2 hybrid vehicle, in order to calculate the torque, rotation speed and power required by the vehicle system and study the fuel consumption of the vehicle.This paper establishes a backward model and a forward model calculation model according to the direction of power flow. In addition, the key components in the transmission system are modeled mathematically. In the technical planning stage of vehicle research and development, the model can be used to analyze the driving strategy and fuel economy of the whole vehicle.
Keywords P2 Configuration, Hybrid Electric Vehicle, Transmission System, Mathematical Model
前言
由于社會和政治的需要,混合动力汽车在过去十年间受到了极大的关注。一方面是由于气候的不断变化:根据欧盟2012年的数据,其22.4%的CO2排放来自于交通工具的排放;另一方面则是由于石油资源的限制和政治等因素导致燃油价格不断上涨,因此对于更高效的低油耗汽车的需求越来越大。仅通过进一步发展车辆本身以及发动机技术,如减少摩擦损耗和结构轻量化等,无法满足严格的排放限制,因此新型的混合动力汽车是一个很有前景的选择[1-2]。
混合动力汽车包括一系列电气部件以及机械部件,其动力总成的控制非常复杂,这些控制通常都是非线性的,建立仿真数学模型有利于提前对此类车型的研发前期进行数据评估及参数优化[3-5]。
1 P2构型组成
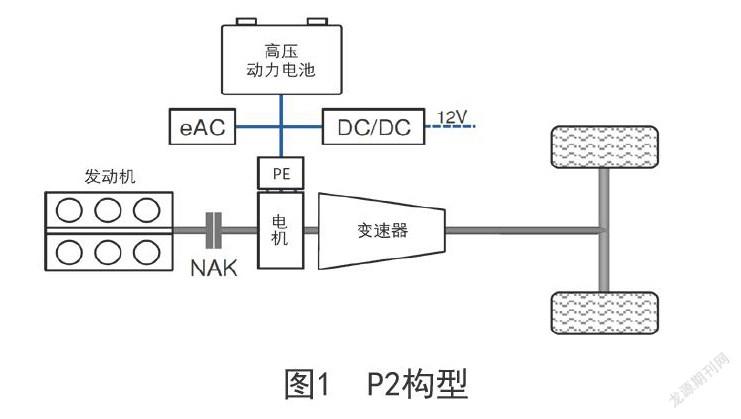
本文采用P2混动汽车作为建模的基础,其所用混动总成的系统结构如下图所示。
该混动总成系统中的变速器的输入轴未安装变矩器,而是安装了一个电机和一个启动离合器(NAK)作为替代。位于电机和发动机之间的启动离合器(NAK)既是启动部件,又是动力分离部件,利用该部件可以实现发动机和其他部件的耦合及解耦。此处使用的电机为永磁同步电机,其通过功率电子器件(PE)连接至高压动力电池。此外高压电气系统还包括车载空调系统(eAC)的制冷压缩机以及DC/DC转换器,该转换器向12V低压系统以及其他需要从动力电池获取电能的用电器供电。
2 建立传统系统数学模型
在对整车动力单元所需输出的扭矩、转速和功率进行计算时,根据计算过程中动力的流动方向可划分为后向模型以及前向模型,此外还需对各机械部件以及电气部件进行建模描述。
2.1 后向模型
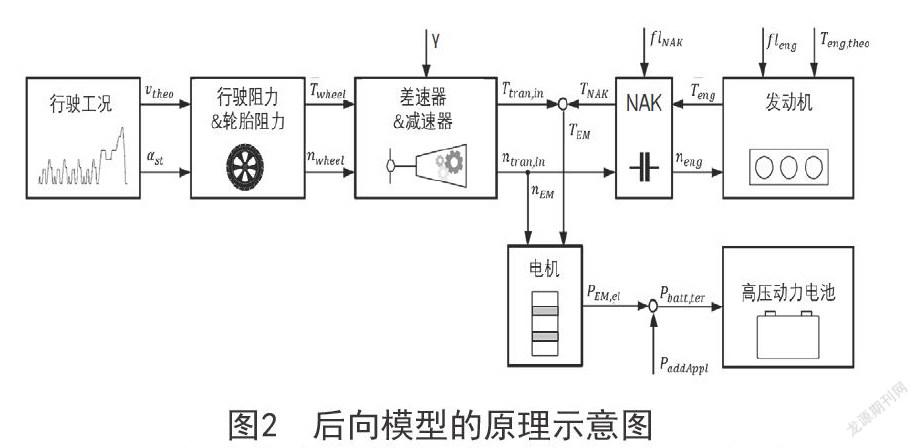
如图2所示为后向模型的原理示意图,其特征在于,从轮端开始向驱动单元方向进行计算。根据行驶工况和驾驶状态,可通过时域离散法来计算系统所需的扭矩、转速以及功率,以此来满足行驶工况。计算过程中不考虑车辆由于驱动功率限制而无法满足行驶工况要求的情况。
车辆前进需克服的驱动阻力Fdrv,r包括滚动阻力Froll,r,空气阻力Fair,r以及上坡阻力Fup,r,通过车辆参数(滚动阻力系数Froll,风阻系数Cw,前部投影截面A以及车身重量),并根据行驶工况所需的理论车速以及当前道路坡度即可得驱动阻力Fdrv,r的计算式如下:
根据下列公式可计算出轮端所需输出的扭矩以及轮端转速:
:加速度
:动态车轮半径,
:旋转部件的等效质量
计算过程中需考虑后桥差速器的扭矩损失和变速器扭矩损失,根据他们所对应的传动比和,可计算出变速器输入端的扭矩和转速:
计算出变速器输入端的扭矩后,接下来需解决发动机和电机之间的扭矩分配问题。扭矩分配由发动机的扭矩确定。根据离合器的状态,电机的扭矩计算如下:
其中:
在离合器结合状态时()发动机的扭矩经过离合器传递,电机的扭矩就等于变速器输入扭矩和离合器扭矩之差。由于湿式离合器片是在润滑油中运行的,因此在分离情况下存在拖曳力矩,在离合器分离状态时()必须从电机额外引入离合器的拖曳力矩TNAK,trail。
由于电机和变速器输入轴直连,因此电机转速就等于变速器的输入转速。
发动机的转速则取决于发动机是否启动(),也取决于离合器是结合状态()还是分离状态():
若离合器分离并启动发动机,或者在离合器接合的情况下,发动机转速低于空转转速nLL,那么可以认为发动机处于空转状态。
电机功率PEM的计算也是如此。连同其他用电器的功率需求可以计算出施加到动力电池端子上的负载功率Pter:
2.2 前向模型
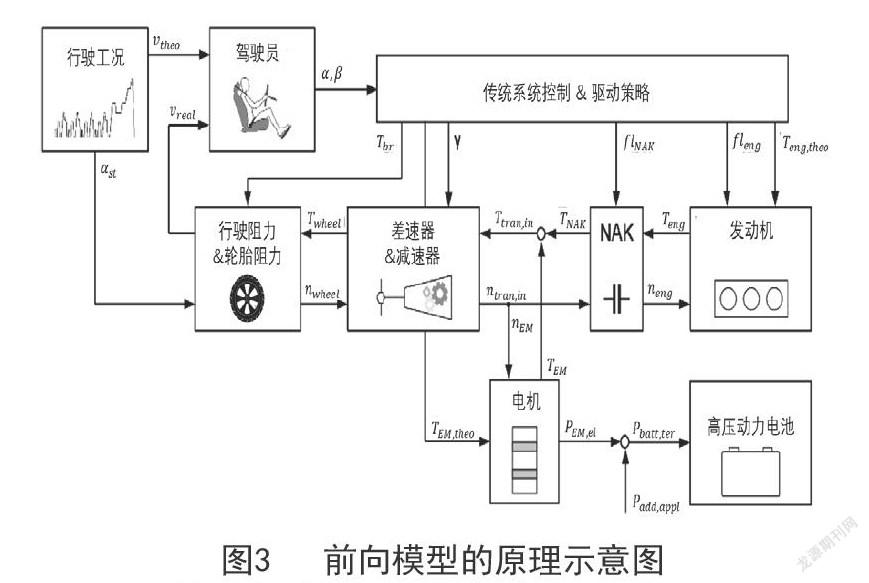
与后向模型不同,前向模型则是根据驱动单元的驱动功率计算出轮端的输出功率以及车速。其原理如图3所示。但是由车速决定的转速仍然是通过轮端反向计算得出的。该模型的扭矩和转速都契合于实际整车,其能更好反映出传动系统中的信息流和能量流。
为确定驱动单元所需施加的扭矩,以便使车辆能按照行驶工况行驶,前向模型还需增加一个驾驶员模型。在每一计算步骤中,按照PI控制器得出的驾驶员模型将实际车速vauto同行驶工况的理论车速vtheo进行对比,并据此输出一个油门踏板位置夹角以及一个制动踏板位置。根据油门踏板位置夹角换算出扭矩需求,根据驱动策略就可以确定发动机、电机以及摩擦制动器所需施加的扭矩大小。考虑到各自的扭矩极限,并根据离合器的状态以及变速器和差速器的损耗和传动比,就可计算出传递到轮端的扭矩TWheel:
根据是正扭矩请求还是负制动请求,轮端扭矩Twheel要么是正,要么是负。可以计算出车速的变化率:
其中汽车等效质量meqv:
其中汽车等效质量由汽车平移加速质量mauto以及以轮端转速、差速器转速和变速器输入转速等旋转部件的转动惯性矩(计算过程中还需考虑到各自对应的传动比)组成。
3 传动系统部件建模
还需对传动系统中的各部件进行建模。传动系统部件的模型是准静态的基于关系map图的模型。除了在相应强调的位置有微小差异外,该传动系统部件模型在前向和后向模型中都得到了应用。
3.1 差速器和变速器
后驱动轴差速器和变速器不仅可以用传动比的形式来表示,也可以用输入轴和输出轴之间的损失扭矩来表示。差速器的扭矩损失Tdiff,loss可以根据输入端的扭矩Tdiff、输入端的转速ndiff以及不同的油温θdiff,oill计算:
而变速器的扭矩损失Ttran,loss还另外与挡位γ有关:
除了齿轮副、轴承、离合器等处的摩擦损失外,变速器的扭矩损失还包括用于油泵驱动所需的功率。所使用的数据来源于不同转速和不同油温下的损失测量。为了能额外考虑一个同负载相关的影响,该影响利用一个恒定的,和挡位有关的效率可以通过测量得到的关系图来表示。换挡线是油门踏板位置夹角α和变速器输出端转速nDiff的函数。根据车辆是处于纯电驱动模式(flNAK=0)还是混动模式(flNAK=1),并根据前向模型中的当前挡位γ来确定下一时刻的挡位选择:
在后向模型中由于时域离散化计算,会立刻进行挡位切换,而在前向模型中则会延迟。另外传动比关系是以正切双曲线函数动态变化的。
3.2 离合器
在模拟仿真过程中,通常情况下都是采用纯电启动,因此离合器在纯电驱动过程中充当着分离元件的角色,因此其被简化为一个仅有两种状态的系统。在接合状态下(flNAK=1)忽略滑磨影响,可以假设能量传递没有损失。在分离状态下则用拖曳力矩TNAK,trail表示,拖曳力矩和离合器片的差速以及变速器润滑油温θtran,oil有关:
拖曳力矩会随着速差的增大而逐渐增大,也会随着油温的降低而逐渐增大,其原因为剪切应力随着离合器摩擦片之间油液粘度和速差的增大而增大。
3.3 发动机
为了能尽可能在传动系统中更换不同的发动机,以研究不同发动机性能带来的差异,此处可以用静态map图来表示发动机的特性。在车辆设计阶段最为重要的是对预研车辆的油耗进行评估,因此本文仅关注发动机在其工作温度下的油耗,而忽略排放以及其他動态影响。研究油耗时是根据发动机的扭矩Teng和转速neng 得出发动机的燃油质量流量的map图。
此外,发动机的拖曳性能利用拖曳力矩Teng,trail描述,拖曳力矩取决于发动机转速:
其描述了发动机在断开状态下(即切断动力)的情况(fleng=0):
当对发动机的扭矩请求小于零且转速大于转速阈值nthre时,无论是扭矩还是转速都在启动阈值和关闭阈值之间存在一个迟滞,在这种情况下切断动力的控制逻辑就会生效。在仿真计算中使用到的燃油质量流量的map图以及拖曳力矩随转速的变化曲线可以利用台架试验得出。
3.4 电机
如同其他的传动系统部件,电机连同其功率电子设备被构建成了一个静态的map图。这种关系是通过电功率PEM,el关于电机扭矩TEM和转速nEM的函数来实现的。
与借助效率map图的映射关系不同,此处描述的是零功率损耗或者说是在零扭矩损耗情况下的电功率需求。虽然后向模型的计算方法要求时域离散,但是通常没有考虑其迟滞现象,在前向模型中也假定电机响应没有迟滞,会立刻给出所设定的扭矩。
3.5 高压动力电池
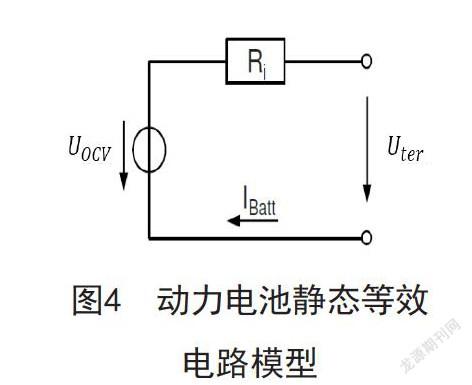
高压动力电池使用等效电路模型以及map图中存储的电池参数来表示。图4和图5使用了两种不同的建模方法:一种静态模型以及一种动态模型。在计算时间和复杂度较高的情况下,动态建模具有以下优点:动态效应,如双层电容,电荷交换或扩散的时间特性都能映射出来。在情况更为多变的实际行驶工况中,动态建模在仿真质量上更具优势。因为后向模型法中需要进行时域离散计算,无法使用动态建模方法,因此此时要使用静态建模。
如图4所示,动力电池静态模型的等效电路图仅由一个稳压直流电源UOCV,以及一个串联的电阻Ri组成。在混动汽车的仿真领域,这是一种常用的模型。利用基尔霍夫第二定理以及二次方程组求解,该模型的电池电流IBatt以及电池端功率Pter可用以下公式算出:
根据动力电池的容量Q0,可以在仿真过程中得到每一步的荷电状态变化量△SOC:
△t是仿真步长。
此外,根据动力电池电流和开路电压,可以计算出动力电池功率Pbatt:
与电池端功率Pter相比,Pbatt中还包含了充放电产生的电池损耗。
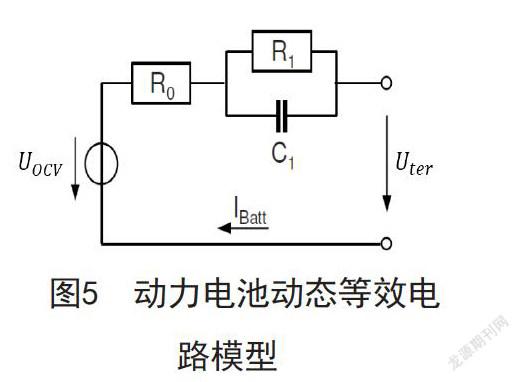
为了说明动力电池随时间的变化特性,动态等效电路模型中增加了一个串联的RC元件,见图5。同根据电池功率给出的时域离散的电池电流相反,此处的电池特性可用下列微分方程描述:
使用基尔霍夫定律也可从该等效电路图中推导出该关系。
在两个仿真模型中,静态电压UOCV和内阻Ri随荷电状态以及温度的变化而变化。内阻大小根据电流方向(充电或放电)进行设定。稳态电压随荷电状态的变化曲线以及动力电池内阻值大小的变化可以通过实际的测量得出一个相应的映射曲线。在静态等效模型中,内阻值的大小通过10秒内充电或放电1C时的电压降来确定。而在动态等效模型中,电阻R0则是使用0.1s内的值,因此此处的动态特性是通过RC元件来建立的。与10s的值相反,这些(0.1s)值几乎仅包括欧姆电阻。虽然这些值来自电池的测量值,但RC元件的值是通过将仿真出的电池电压与在不同驱行驶工况下测得的电压进行比较确定的。
4 结论
本文以P2混动汽车作为研究对象提出一种传动系统的数学建模方法,利用该传动系统的数学模型可通过研发阶段的建模仿真来分析研究P2混动汽车的驱动模式切换策略以及整车所需输出的扭矩及扭矩分配、转速和功率等,此外还可借助该数学模型计算整車的燃油经济性,作为汽车研发过程中的方向基础。
参考文献
[1] 臻晓阳,王磊,等.我国新能源汽车政策动态及发展趋势[J].天津科技,2017,44(2):16-18.
[2] 邓国开.我国新能源汽车产业发展现状、挑战与展望[J].重型汽车.
[3] 何仁,李军民.混合动力电动汽车动力耦合系统与能量管理策略研究综述[J].重庆理工大学学报,2018,32(10):1-16.
[4] 逯家鹏,李幼德,等.BSG怠速启停系统车辆控制策略研究[J].农业机械学报,2016,47(2):316-322.
[5] 王庆年,何洪文,等.并联混合动力汽车传动系统参数匹配[J].吉林工业大学自然科学学报,2000,30(1):72-75.
猜你喜欢
疯狂英语·读写版(2023年12期)2023-02-20 18:41:06
中国造纸(2022年8期)2022-11-24 09:43:38
体育科技文献通报(2022年3期)2022-05-23 13:46:54
新高考·高二数学(2022年3期)2022-04-29 05:08:09
一重技术(2021年5期)2022-01-18 05:42:12
电子制作(2018年10期)2018-08-04 03:24:26
汽车工程学报(2016年5期)2017-01-16 02:25:57
汽车工程学报(2016年6期)2017-01-11 17:35:29
中学数学杂志(初中版)(2016年5期)2016-11-01 11:22:43
现代电子技术(2015年22期)2015-12-02 21:44:41
