工业级垂直起降固定翼无人机总体布局及发展趋势
2019-09-10 19:09:35沙永祥钱凯
无人机 2019年1期
沙永祥 钱凯


垂直起降固定翼无人机具有无需跑道、续航力强、安全性高、制造难度低等优点,正成为工业级无人机发展的新趋势。本文从其总体布局的角度,阐述了该类型无人机的发展现状,各种构型性能优缺点與差异,并对未来行业技术发展趋势做了系统分析。
随着军民融合战略的推进,近年来工业级无人机在民用领域获得了突飞猛进的发展,被广泛应用于农业、商业、能源和医疗等各个领域。工业级无人机按照构型大致可以分为三类:无人直升机、多旋翼无人机、固定翼无人机。无人直升机在载重、续航等指标上有着突出的优势,但其动力和操纵都来自旋翼,机构异常复杂,导致成本高,可靠性低,限制了无人直升机的推广;多旋翼无人机兴起于消费级领域,其构型简单,零部件成品化高,技术门槛相对较低,但航时和航程短的缺点极大地限制了其应用场景;固定翼飞行器具备效率高、速度快、航时长、航程远、可靠性高等优点,但其对起降条件要求高,且辅助保障设备多,部署时间长。
垂直起降固定翼无人机作为近年工业级无人机的新兴事物,融合了多旋翼无人机和固定翼无人机的特点,具有无需跑道,续航力强,安全性高,制造难度低等优点,正成为工业级无人机发展的新趋势。
工业级垂直起降固定翼无人机总体布局
从总体布局形式来看,垂直起降固定翼无人机主要有以下几类:尾座式、倾转动力式(包括倾转旋翼式、倾转涵道风扇式、倾转机翼式)以及复合式。
尾座式
尾座式垂直起降固定翼无人机兼具多旋翼无人机和固定翼无人机的优点。在机尾安装有起降支架,垂直起飞时机尾坐地机头向上,达到一定高度后转入平飞,降落时先调整姿态使机头向上,随后进行垂直降落。这种起降方式的优点是结构简单、系统废重少、效率高,但其控制系统开发难度较高,在垂直起降期间抗风性能较低,且其尾座式的特点在一定程度上降低了总体布局的灵活性。
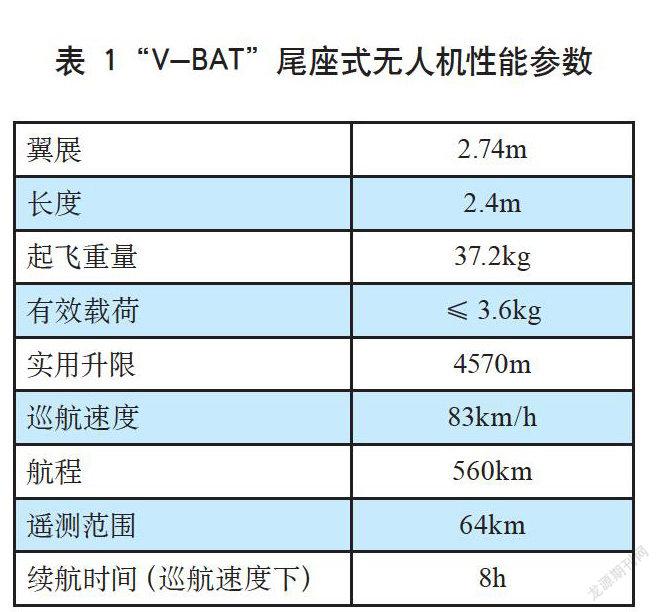
“V-BAT”是MartinUAV公司设计的先进垂直起降固定翼无人机。其机尾安装的涵道风扇使无人机可以直立起降,并通过涵道风扇中安装的舵面进行直立起降飞行的三轴姿态控制,在爬升到一定高度后再转换成水平飞行模式。根据资料显示,“V-BAT”能够在移动的卡车上自主着陆,可靠性强,安全性好。此外,高效率、高航程、高航时等优异的性能特点使“V-BAT”赢得了美国陆军的青睐。
“X-Hawk”尾座式无人机
“X-Hawk”是四川傲势科技有限公司推出的一种纯电动尾座式垂直起降固定翼无人机。其垂直起降阶段采用四旋翼作为动力来源,并通过四旋翼的控制方法进行姿态控制,在转平飞后,通过对螺旋桨进行变距的形式,实现不同巡航速度下的高效飞行。 此外,“X-Hawk”可实现完全自主飞行。它可在使用者设定任务后,自主设计航线飞行,同时也可切换手动飞行或指令飞行模式,具有失控返航、一键返航、低电量返航、断链路返航、可设置的虚拟围栏等高级功能,系统可靠性较高。
倾转动力式
倾转动力飞行器的概念最早由美国贝尔公司提出,无人机起飞时推力向上,转入水平飞行时利用倾转机构使推力向前,作为前飞动力。由机翼承担部分或全部升力。倾转动力式无人机推力方向变化都需要倾转机构,这样必然会存在机构可靠性与费重问题,并且垂直转平飞过渡阶段稳定性差的问题也对智能飞控技术提出了新的挑战。倾转动力式垂直起降固定翼飞行器包括倾转旋翼式、倾转涵道风扇式以及倾转机翼式。
倾转旋翼
“Quantum TRON90”是由德国慕尼黑Quantum System公司研制的一款纯电驱动倾转旋翼式垂直起降无人机。起降时采用四旋翼模式,提供向上的拉力;平飞时,前两部旋翼水平倾转提供前飞动力,后两部旋翼向后倾转以减小飞行阻力。根据其官方资料,该机采用模块化设计,能快速有效的适应不同应用场景。目前该机已成功应用于电力巡检、航空测绘、农业监视等领域。此外,Quantum System公司还推出了三旋翼布局倾转旋翼无人机。
倾转涵道风扇
德国空中出租车公司Lilium推出了一款私人“百合号(Lilium)”倾转涵道风扇飞行器,该机采用纯电力驱动,垂直起降,配备可收放起落架。
百合喷气的两座版已于2017年4月首飞,该机使用36个倾转涵道电动风扇发动机(主翼24个,鸭翼12个)进行驱动,重量约600kg,最大商载200kg,最大飞行时速可达300km/h,单次充电航行距离达300km。起飞时风扇偏转指向下方,水平飞行时风扇水平指向前方,提供前飞动力。该无人机采用Lilium航空公司的“超冗余”概念,从安全性出发,任何一个组件的故障都不会影响正常飞行着陆。
倾转机翼
美国国家航空航天局(NASA)最近研发了一款倾转机翼垂直起降无人机,简称“GL-10”。NASA的工程师于2017年测试了这款无人机的缩比验证机,其翼展为3.05m,机翼上有8个电机,尾部有两个电机,起飞时最大重量为28.1kg。
全尺寸版本将采用电力/柴油混合驱动螺旋桨。起飞时,机翼平尾处于倾转状态,螺旋桨推力方向向上,垂直起飞,一定高度后,机翼平尾再倾转到水平位置,螺旋桨推力向前,类似固定翼一样飞行,起飞降落均无需一些额外的地面辅助起降装置。此外,“GL-10”螺旋桨桨尖速度设计较低,显著降低了螺旋桨的噪声。
“雷击(LightningStrike)”
“雷击”无人机是美国极光公司为美国国防高级研究计划局(DARPA)的“垂直起降试验飞机”(VTOL X-Plane)项目研制的一款倾转机翼垂直起降飞机。其正式代号为XV-24A。由1台罗罗公司的AE1107C涡轴发动机驱动,通过其驱动3台霍尼韦尔公司的发电机来产生电力,并将电力分配至全机24个涵道式风扇上(2个鸭翼上各安装3个,2个主机翼上则各安装9个风扇),形成分布式混合电推进系统。
图 6(a)所示为“雷击”1/5等比例验证机,全机重量为147.4kg,采用电力推进,配有54.4kg的锂电池,能以185km/h的速度连续航行5min。
然而,子承包商霍尼韦尔公司在研发高性能1兆瓦级发电机时遇到了技术瓶颈,使项目在第二阶段难以制造出全尺寸原型机。目前美国防部国防高级研究计划局(DARPA)决定取消项目第三阶段研发和相关飞行试验。
复合式
复合式垂直起降固定翼无人机类似于在固定翼的基础上加装一套垂直起降动力系统,通过两套动力分别实现起降和平飞。相对于其他垂直起降飞行器,复合式垂直起降无人机具有技术可实现性好、飞行可靠性高、生产成本较低等优点。早期复合式无人机由于电机技术不成熟,巡航无效重量较大,但随着高功重比无刷电机的出现,配合良好的气动外形设计,复合式无人机也能达到极高的飞行性能。
“X-Swift”复合式无人机
“X-Swift”是四川傲势科技有限公司研发生产的一款纯电驱动垂直起降固定翼无人机,该机采用四旋翼与固定翼复合式布局,通过四旋翼模式进行垂直起降,固定翼模式进行平飞。
“X-Swift”具备高可靠性(平均故障时间为50h)、高便捷维护性(可更换相应部件)、高安全性(防插错设计、防动力系统非指令性启动)以及载荷互换性(可配备光电吊舱、正射像机、倾斜相机、喊话器等载荷),具备全自主飞行能力,能够通过模块化的多构型配置,为航空测绘、线路巡查、侦查监视等工业级用户提供专业解决方案。
“X-Chimera”复合式无人机
“X-Chimera”是四川傲势科技有限公司推出的一款纯电动高任务性能的垂直起降固定翼无人机。该机于2018年成功实现首飞。
“X-Chimera”无人机采用了前沿的翼身融合气动设计技术,实现了该机优异的气动性能,机身采用航空钛合金、镁合金材料让该机轻盈坚固,可靠性更高。此外,模块化设计其可智能识别多种载荷设备,仅需简单更换,便能持续完成不同任务。据介绍,“X-Chimera”具备很强的环境适应能力,满足小雨、高海拔、高低温、强侧风、盐雾、沙尘、复杂地形、复杂电磁环境等场景下的飞行应用。在系统部署方面,全套无人机系统可由一辆SUV携行,两人10min内无工具完成全系统展开、飞前准备或拆收工作,极具灵活性。
综上所述,从垂直起降固定翼无人机总体布局形式来看,尾座式无人机控制难度高,起降期间抗风性能差,可靠性偏低,导致其并未得到大规模的应用;倾转动力式无人机具备航程远,航速高等特点,并且随着分布式电推进技术以及智能控制技术的成熟,倾转动力无人机将会具有广阔的应用前景;复合式垂直起降无人机具有技术可实现性好、飞行可靠性高、生产成本较低等优点,在民用领域比如航拍测绘、电力巡检、公共安全、交通城管等行业将发挥重要的作用。
发展趋势
任务载荷多样化、模块化、互换性
工业级无人机任务载荷多种多样,包括多拼相机、光电球、喊话器、灭火弹等等。载荷的多样性决定了无人机从设计之初就必须考虑其载荷的模块化及互换性。当无人机执行不同任务或者升级相关设备时,能够迅速更换其任务载荷,以更好满足特定任务需求,适应不同行业应用。
高环境适应性
随着用途越来越多样化,未来无人机需要具备在任何严苛的环境条件下可靠工作的能力。例如,在舰船起降时需要面临风力、洋流和船舶本身的运动等复杂环境,这对无人机机载智能控制系统的稳定性和鲁棒性提出了更高的要求。
纯电驱动、分布式电推进
对于工业级无人机的动力推进方式,业界普遍认为零排放、高效率、低噪声的纯电推进驱动将会是垂直起降固定翼无人机主流发展方向。分布式电推进采用電力驱动多个分布于机翼、机身或尾翼的电机,并由电机驱动螺旋桨、涵道风扇等动力装置提供全部推力。分布式电推进系统动力分散布置,控制更为灵活,容错性能更好,系统冗余度高。另外,小风扇能够更为方便地融入机身,利于气流附着翼面,使得气动效率更高,有助于改善飞行性能。
感知与避让
感知和避让技术是防止无人机与其它飞行器相撞的重要技术保障。利用无人机携带的设备探测感知周围环境、在当前态势感知的基础上判断是否存在飞行冲突、重新规划航迹规避冲突是感知与规避的三大关键技术。与有人机相比,无人机感知规避技术还不够成熟,尚不具备多机、三维尺度下的感知与规避能力,而且感知、判断、规避任何一个环节出现信号传输延迟都将直接影响规避结果,感知与规避的可靠性、鲁棒性也需进一步提高。
自主性与智能化
未来无人机将不仅仅是一个飞行载体,被动完成飞行任务,而是向单机智能飞行、多机智能协同、任务自主智能等方向发展,具备主动感知、自主判断、采集数据、智能学习和协同作业等各项能力。同时,与AR、VR设备的结合,对无人机的飞行和操控也将带来全新的体验。
结论
纵观国内外无人机研究成果及其应用领域,垂直起降固定翼无人机正成为工业级无人机发展的新趋势。从总体布局来看,倾转动力式以及复合式将具有更广泛的应用前景;从推进动力来看,业界普遍认为零排放高效率低噪声的电推进方式将是未来的主流发展方向;从载荷形式来看,任务载荷多样化、模块化、互换性等特点能更好满足特定任务需求,适应不同行业应用;从飞机性能来看,高环境适应性、先进态势感知技术、自主性与智能化等关键技术也将是工业级垂直起降固定翼无人机发展的重要方向。
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24 01:13:00
北京航空航天大学学报(2020年10期)2020-11-14 09:26:06
商品与质量(2019年43期)2019-05-25 08:34:54
电子制作(2019年7期)2019-04-25 13:18:24
航空模型(2016年10期)2017-05-09 06:25:59
制造技术与机床(2017年2期)2017-05-04 04:17:34
舰船科学技术(2016年1期)2016-02-27 15:39:22
航空学报(2015年4期)2015-05-07 06:43:28
金属加工(热加工)(2015年17期)2015-04-23 04:23:34
振动、测试与诊断(2014年5期)2014-03-01 01:14:27