
基于多传感器融合的图像处理的避障研究
2019-09-10 07:22陈鹏宇张振路晨雨陈姜会张之涵黄菲雨
科海故事博览·下旬刊 2019年2期
陈鹏宇 张振 路晨雨 陈姜会 张之涵 黄菲雨
摘 要 推进多传感器技术对实现更高效、准确、及时的信息传输有着重大的作用和帮助。文章对于多传感器融合在图像的处理方面的应用进行了研究,将激光雷达、双目相机、GPS、惯性导航系统融合,实现图像的实时处理,达到避障的目的,在实验中采用无人车为主要实器材,对避障过程进行了模拟。
关键词 多传感器融合 激光雷达 双目相机 GPS 惯性导航 图像处理
一、引言
最初仅用于军事科学,现已广泛适用于民用工程的多传感器融合是多种学科的交叉应用。
在医疗领域,可以提高对人体结构的研究工作水平,也能为确诊疾病提供有效依据;环境监测方面,可以了解区域地形地貌、矿产资源、气候变化等信息,从而为资源管理、大气污染监测等工作提供宝贵资料;无人驾驶领域,保障了无人驾驶的安全性和有效性;机器人领域,使得信息更加有效、完善和准确,降低收集信息的成本,保证信息的完善[1],并且针对于解决机器人避障问题,精度及速度也可以被控制得更为准确[2]。
二、研究目的及主要内容
研究目的是融合激光雷达、双目相机、GPS、惯导系统,实现图像实时处理,达到避障目的。激光雷达对障碍物进行测量,起到探测、识别和跟踪障碍物的目的。双目相机改善激光雷达的垂直分辨率,并修正激光雷达对于障碍物的参数。GPS和惯导系统可以互相修正,以便对避障做出合理及时的预测。
项目所采用的技术路线是激光雷達探测,GPS加惯导系统辅助,双目相机修正,最终达到准确避障的目的。
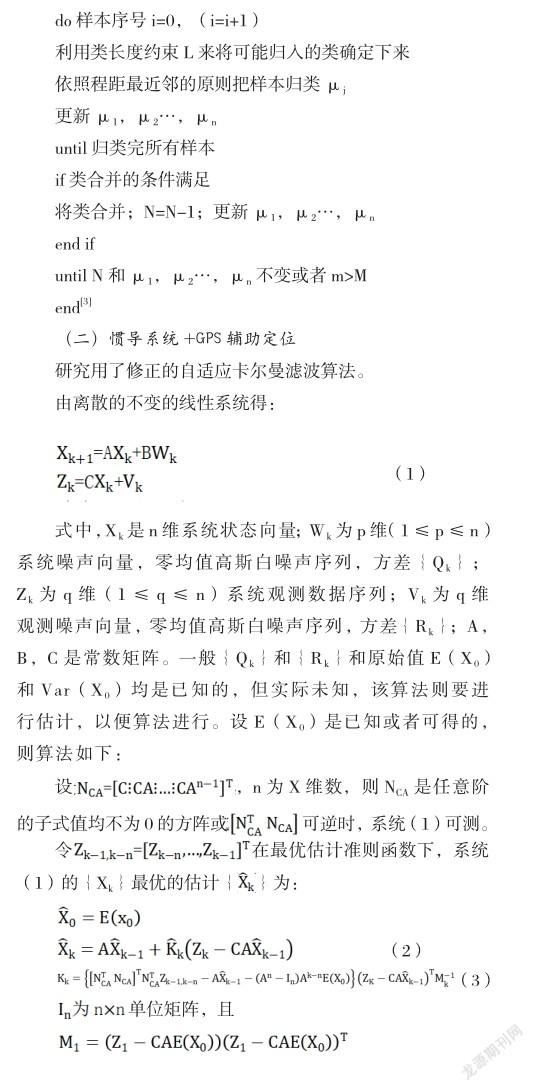
三、算法介绍
(一)激光雷达
16线激光雷达对障碍物进行识别并判断动静时,采用在ISODATA算法的基础上进行聚类分析的方法。
在实际中,有距离和角度两个约束。在归类时另建类长度约束,其定义是类中样本角度极值,来限制角度;并且将样本点限制为是均布的,控制样本数量。
算法如下:
begin initialize 类长度约束L,初始类聚中心μ1,μ2…,μn,初始类的数目N,迭代最大次数M,类的最少样本数Nmin,
do 迭代次数 m=0,(m=m+1)

四、实验思路和过程
该研究采用实验模拟的方式,场地在长安大学渭水校区汽车实验场,实验场有着1.1km直线形试车道、2.4km的环形汽车高速跑道等多种路面和试验广场以及无人车,满足研究的需求。
连接雷达系统,查看雷达发送数据包情况,雷达发送到目的端数据包1206个字节,数据发送正常。
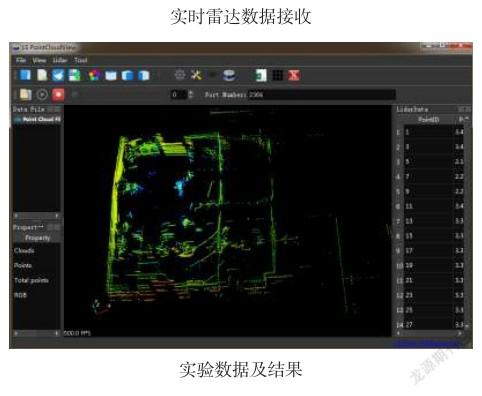

经过实验模拟后,传感器融合处理的图像情况良好,并且有着较高的灵敏性,对实物有着较高的还原,在各种弯道上行驶情况良好。
参考文献:
[1]杨春娣.多传感器信息融合及其运用[J].科技风,2019(08):86.
[2]彭梦.基于多传感器融合的移动机器人障碍物检测研究[D].中南大学,2007.
[3]吴维一,刘大学,戴斌.一种处理激光雷达数据的聚类分析方法[J].计算机仿真,2007(08):236- 240.
[4]许刚,陆恺,田蔚风.惯导与GPS组合系统中实时自适应卡尔曼滤波技术的研究[J].中国惯性技术学报,1996(03):3- 7.
[5]张国良,姚二亮,林志林,徐慧.融合直接法与特征法的快速双目SLAM算法[J].机器人,2017,39(06):879- 888.
猜你喜欢
电脑知识与技术(2022年9期)2022-05-10
电脑知识与技术(2022年9期)2022-05-10
计算技术与自动化(2022年1期)2022-04-15
汽车观察(2021年8期)2021-09-01
科技研究·理论版(2021年20期)2021-04-20
计算机与网络(2020年19期)2020-12-04
教育教学论坛(2018年5期)2018-01-22
新媒体研究(2014年14期)2014-08-22
