基于STM32单片机的麦克纳姆轮小车设计
2019-09-10 19:57:26孙全胜
现代信息科技 2019年22期


摘 要:本文设计了一款基于STM32单片机的四轮驱动智能小车,能够准确地实现寻迹避障功能。小车以单片机为控制核心,外接稳压电源模块、超声波传感模块、电机驱动模块。采用超声波传感器作为小车的传感器模块来识别路面和障碍物信息;采用BTN7971驱动芯片控制驱动模块,并不再使用传统小车的普通驱动轮,使用麦克纳姆轮作为小车驱动轮。使本设计中的小车可以原地旋转、左右平移,更加适应复杂环境,能够快速、稳定地实现精准避障。所设计的智能小车结构简单,容易实现。
关键词:STM32单片机;智能小车;麦克纳姆轮;超声波避障
中图分类号:TP242 文献标识码:A 文章编号:2096-4706(2019)22-0174-03
Abstract:This design is based on STM32 single-chip microcomputer four-wheel drive intelligent car,can accurately achieve the track and obstacle avoidance function. The car takes microcontroller as the control core,and is externally connected with stable voltage power module,ultrasonic sensing module and motor driving module. Ultrasonic sensor is used as the sensor module of the car to identify road and obstacle information. BTN7971 driver chip is adopted to control the driver module,and the conventional car's ordinary drive wheel is no longer used,Mecanum wheel is used as the car's drive wheel. The car in this design can rotate in place and shift around,which is more suitable for complex environment and can achieve accurate obstacle avoidance in a fast and stable way. The intelligent car is simple in structure and easy to realize.
Keywords:STM32 microcontroller;intelligent car;Mecanum wheel;ultrasonic obstacle avoidance
0 引 言
当下科技的发展迅速,智能小车发展飞快,智能小车也作为机器人行业的典型代表,在汽车、机械生产、以及物流运输行业里起到重要作用。本文所设计的四轮驱动智能车对以往的普通驱动轮做出了改进,全部使用了麦克纳姆轮,可以实现在运输过程中遇到障碍物时能够全方位地移动,从而快速有效地实现避障。包括在很多道路复杂、障碍物多的情况下也可以凭借全方位移动来自动实现避障功能。如今常见的智能小车分为红外线避障和超声波避障。红外线传感器有很多局限性,如不可测量距离、容易受到灰尘和强光的干扰;而超声波传感器可以测量距离,受温度和光线影响小,比较稳定,从而可大幅度增强其用于社会生产的能力。
1 智能小车结构的设计
麦克纳姆轮滚轮可以像传统的车轮一样前进后退,也可以实现横行、斜行、旋转及其组合的运动方式。当在工作运输环境十分狭窄的情况下,就能提供多种解决方案,从而实现运输工作。
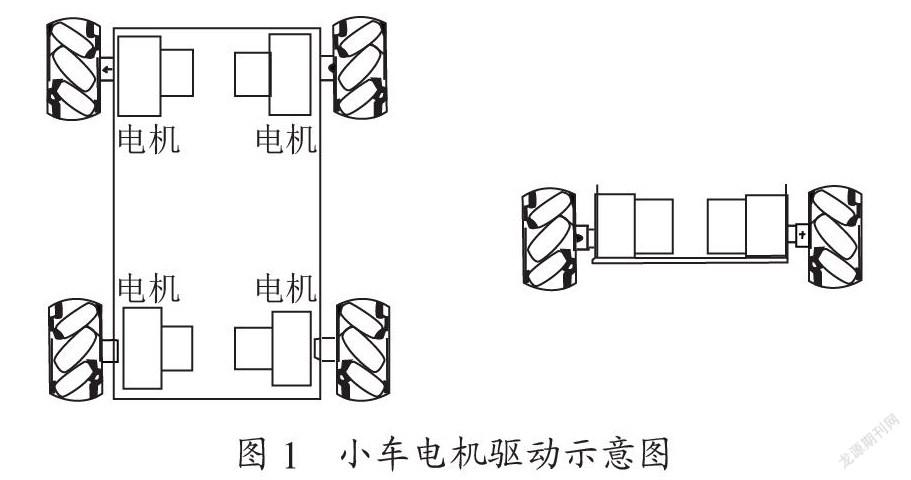
本文所设计的四轮驱动小车由四个电机分别控制四个轮子,减少了每一个驱动轮的负担,相对于传统的后轮驱动小车,四轮驱动保证小车有足够的驱动力,同时轮子使用的是麦克纳姆轮。小车由STM32F103RC为核心驱动,由电源模块、超声波感应器模块、电机驱动模块组成。如图1所示为小车电机驱动模块的大体结构图。
2 硬件模块设计
2.1 智能小车的电源模块
采用12V可充电锂电池供电,电机驱动模块直接由锂电池提供12V的电压,电源模块使用的是XL2596稳压芯片,通过XL2596芯片稳压处理后输出5V电压提供给STM32单片机,能够输出稳定电压以保证电源模块正常有效工作。这样即使电机驱动模块和控制系统不分开供电,也能实现控制系统的稳定工作,减轻小车在电源上的承重压力,为小车提供更大的驱动力。
2.2 智能小车的超声波测距模块设计
超声波测距原理:由单片机接超声波探头后IO口TRIG(控制口)触发开始测距,能提供不低于10us的高电平信号,再通过超声波模块发送出8个40kHz的方波,自主检测是否存在信号返回,如果有信号返回,通过IO口ECHO(接受口)输出高电平,同时定时器打开,当IO口ECHO再次输出低电平时,定时器关闭,记录定时时间t,就是超声波从发射开始到返回结束的时间。
所测距离=声速(340m/s)*t/2
利用超声波测距可以大程度地避免光线、灰尘、烟雾对于信号接收的影响,同时超声波模块周期性发送信号测距,可准确地将路面实时数据传输给单片机处理,使小车驱动轮做出相应的反应。
2.3 智能小车的电机驱动模块
本设计所述智能车要想稳定运行,不仅要在电源模块上做出改变,在电机驱动方面也要有所不同。采用麦克纳姆轮,质量较大、行驶平稳、可以左右平移、原地旋转,比传统小车更灵敏自由。采用直流減速电机驱动,使用12V宽电压输入电机,通电后电机转速可达1600r/min,小车空载时转速可达600r/min,电机减速比为1:30,车轮半径为30mm。
当遇到障碍物时,超声波传感检测将障碍物的数据分析处理后传送给STM32单片机,然后由STM32单片机依据所检测到的各个数据对比标准数据的处理结果输送给BTN7971驱动芯片,从而来控制电机驱动4个麦克纳姆全向轮,使小车改变方向。
2.3.1 麦克纳姆轮的运动原理
驱动轮示意图如图2所示。
当四个驱动轮同时向前或向后运动时,小车可实现向前或向后运动;
当轮1和轮3向前运动,轮2和轮4不动时,小车可实现向左前方45°平移;
当轮1和轮3向后运动,轮2和轮4不动时,小车可实现向右后方45°平移;
当轮2和轮4向前运动,轮1和轮3不动时,小车可实现向右前方45°平移;
当轮2和轮4向后运动,轮1和轮3不动时,小车可实现向左后方45°平移;
当轮1和轮3向前运动,轮2和轮4向后运动时,小车向左平移;
当轮1和轮3向后运动,轮2和轮4向前运动时,小车向右平移;
当轮1和轮4向前运动,轮2和轮3向后运动时,小车原地逆时针旋转;
当轮1和轮4向后运动,轮2和轮3向前运动时,小车原地顺时针旋转。
通过单片机对四个电机的控制使得小车实现不同的操作。
2.3.2 麦克纳姆轮小车在特殊情况下的使用
(1)当小车行驶至如图3情景下时,道路宽度微大于小车的长度,传统的小车几乎不可能实现转弯,而麦克纳姆轮小车就可以凭借自身优势直接向右平移。通过这种复杂路段。
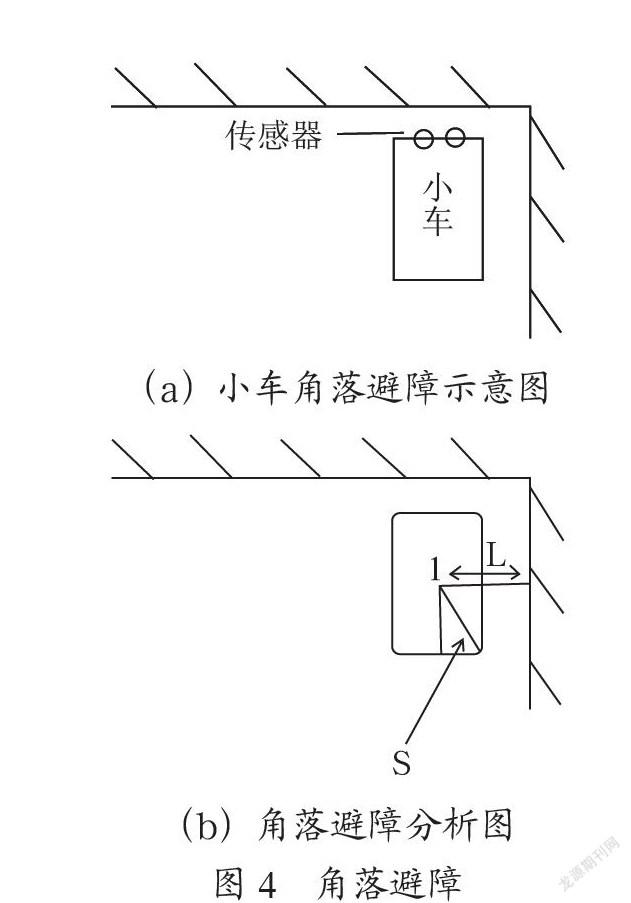
(2)当遇到图4(a)中情景时,传感器会先将四周的障碍距离数据输送给单片机,如图4(b)所示,如果小车中心距侧面距离L小于小车的对角线的一半S时,电机驱动模块会调节驱动轮使小车平行向左移动,直到L大于S时,单片机会驱动小车原地逆时针旋转90°,从而顺利避开障碍物。
本文所设计的小车可以顺利地解决在社会生产中所遇到的几种特殊的运输情况,极大地提高生产效率。因为实际环境是复杂多变的,所以最终的运动情况取决于控制算法和实际环境。
3 小车的优越性
本文所述麦克纳姆轮小车的主要改进点使在驱动轮上,完全舍弃传统小车的驱动轮,使用四轮驱动的麦克纳姆轮。优点在于灵活的全方位移动、驱动力大、稳定性强、操作所需环境比传统小车小。传统小车在面对狭窄的弯道时会出现无法转弯的情况,本小车解决了这个问题;且本小车可以使用平移的方法通过复杂路段,大大减小了对小车长宽的要求;传统小车在遇到急转弯或者越过障碍物时车身不稳定,本小车由于麦克纳姆四轮驱动的特点,在遇到急转弯和障碍物时比传统小车多了很多特殊的转弯和避障方法,大大提高了小车行驶的稳定性,保证小车的正常行驶。
本文设计的小车也可以给社会提供便利,在社会生产和运输中通常会遇到很多复杂的路段环境,导致无法正常进行生产运输,降低效率。而新型的麦克纳姆轮车,便可以在一些复杂路段中比传统轮车更加灵活,更容易适应生产运输,提高社会生产力,所以在以后的社会生产中有很广阔的应用前景。
4 结 论
本设计为基于STM32的以麦克纳姆轮为驱动轮的小车,小车可实现传统小车不能实现的平移、旋转动作;采用测距精确、抗干扰性强的超声波传感器,实现数据的精确传输;每个车轮都配备单独的12V电机驱动,提供了较大的驱动轮。在本文列举出的几种特殊的传统小车不容易快速实现避障功能的车道,所设计的麦克纳姆轮小车可以通过几个模块间的配合自主实现精准避障。虽然这种麦克纳姆轮小车很多地方依然需要改进,但其结构简单,容易实现,同时,在工业生产、社会生活、物流运输等行业,都有很大的实用价值。
参考文献:
[1] 陈飞鹏.基于STC89C52单片机智能小车设计 [J].硅谷,2012(11):43-44.
[2] 柳智鑫.关于单片机的智能小车的设计与制作研究 [J].信息化建设,2015(12):266.
[3] 张弘扬.基于单片机的智能小车装置的设计 [J].科技风,2017(20):12.
[4] 张萍.超声波避障智能小车的设计 [J].自动化仪表,2017,38(9):40-43.
[5] 祝松柏,李清宇.基于STC89C52的循迹避障智能小车的设计 [J].轻工科技,2018,34(3):65-66.
作者簡介:孙全胜(1999.11-),男,汉族,安徽凤台人,本科在读,研究方向:电气工程及其自动化。
猜你喜欢
中国新技术新产品(2017年2期)2017-01-20 18:09:43
电子技术与软件工程(2016年22期)2016-12-26 13:02:32
科技创新与应用(2016年34期)2016-12-23 10:14:38
电子技术与软件工程(2016年20期)2016-12-21 10:44:40
电子技术与软件工程(2016年19期)2016-12-19 20:34:26
科技视界(2016年26期)2016-12-17 08:35:54
教育界·下旬(2016年8期)2016-12-14 10:01:53
科教导刊(2016年27期)2016-11-15 22:32:51
电子技术与软件工程(2016年18期)2016-11-14 02:16:38
电脑知识与技术(2016年17期)2016-07-23 21:15:17