
六轴机器人建模方法、正逆解、轨迹规划与实现
2019-09-09 13:33张兴华肖仕驰
数码世界 2019年6期
张兴华 肖仕驰
摘要:本文用Matlab实现六轴机器人的建模和实现轨迹规划。讲解如何写正逆解以及轨迹插补的程序。程序是基于Matlab2 01 6a,工具箱版本为Robotic Toolbox9.10。
关键词:六轴机器人建模Matlab
1 D-H建模
三个两两相互垂直的XYZ轴构成欧几里得空间,存在六个自由度:沿XYZ平移的三个自由度,绕XYZ旋转的三个自由度。在欧几里得空间中任意线性变换都可以通过这六个自由度完成。
Denavit-Hartenberg提出的D-H参数模型能满足机器人学中的最小线性表示约定,用4个参数就能描述坐标变换:绕X轴平移距离a;绕X轴旋转角度alpha;绕Z轴平移距离d;绕Z轴旋转角度theta。
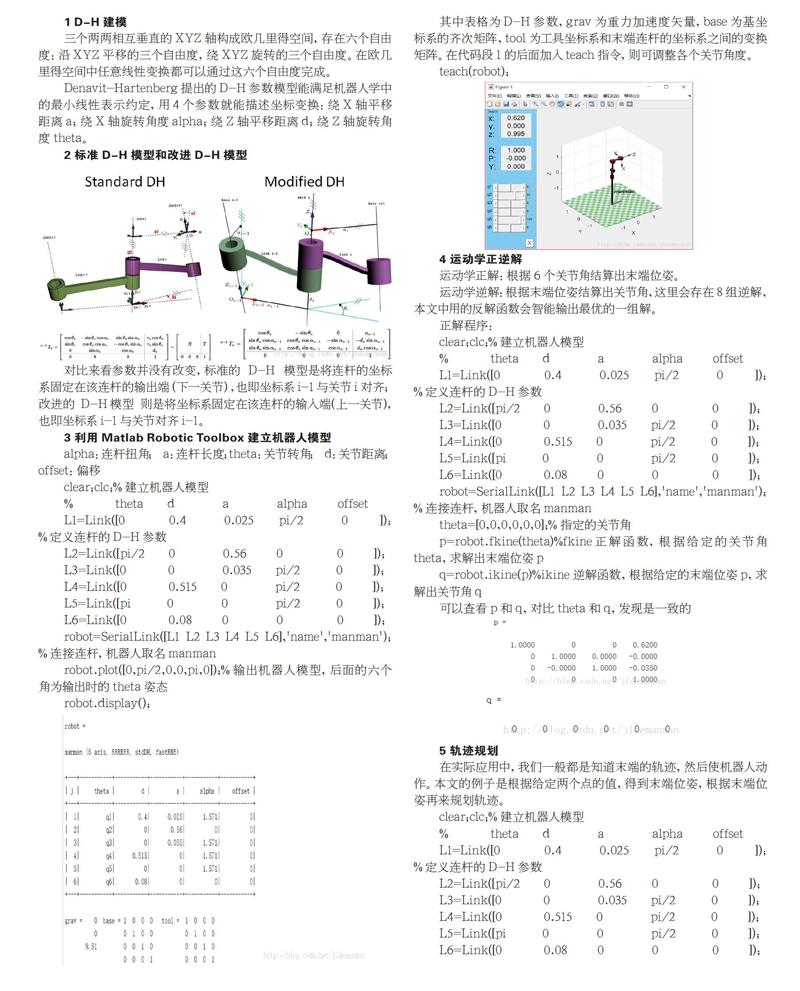
2标准D-H模型和改进D-H模型
对比来看参数并没有改变,标准的D-H模型是将连杆的坐标系固定在该连杆的输出端(下一关节),也即坐标系i 1与关节l对齐;改进的D-H模型则是将坐标系固定在该连杆的输入端(上一关节),也即坐标系i-l与关节对齐i-l。
3利用Matlab Robotic Toolbox建立机器人模型
alpha:连杆扭角;a:连杆长度;theta:关节转角;d:关节距离offset:偏移
clear;clc;%建立机器人模型
%theta d
a
alpha
offset
Ll=Link([0
0.
25 p1/2
0
】);%定义连杆的D-H参数
L2=Link([p1/2
0
0.56
0
0
】);
L3=Link([0
0
0.035
p1/2
0
]);
L4=Link([0
0.515
0 p1/2
0
]);
L5=Link([pi
0
0
p1/2
0
]);
L6=Link([0
0.08
0
0
0
]);
robot=SeriaILink([Ll L2 L3 L4 L5 L61,1namel,manman);%连接连杆,机器人取名manman
robot.plot([0,p1/2,0,O,pi.O]);%输出机器人模型,后面的六个角为输出时的theta姿态
robot.display();
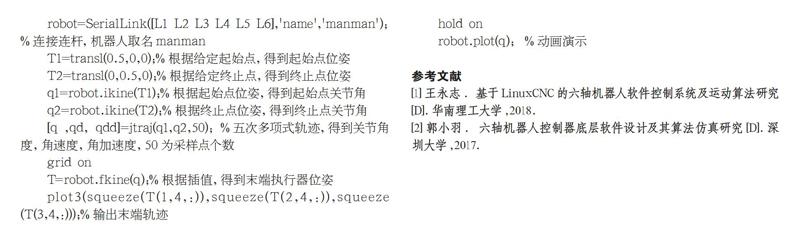
其中表格为D-H参数,grav为重力加速度矢量base为基坐标系的齐次矩阵,tool為工具坐标系和末端连杆的坐标系之间的变换矩阵。在代码段l的后面加入teach指令,则可调整各个关节角度。
teach(robot);
4运动学正逆解
运动学正解:根据6个关节角结算出末端位姿。
运动学逆解:根据末端位姿结算出关节角,这里会存在8组逆解,本文中用的反解函数会智能输出最优的一组解。
正解程序:
clear;clc;%建立机器人模型
%theta d
a
alpha
offset
Ll=Link([0
0.
25 p1/2
0
]);%定义连杆的D-H参数
L2=Link([p1/2
0
0.56
0
0
】);
L3=Link([0
0
0.035 p1/2
0
]);
L4=Link([0
0.515
0
p1/2
0
】);
L5=Link([pi
O
pl/2
0
]);
L6=Link([0
0.08
0
0
]);
robot=SerialLink([Ll L2 L3 L4 L5 L6],namel,manman);%连接连杆,机器人取名manman
theta=LO,O,O,0,O,0];%指定的关节角
p=robot.fkine(theta)%fkine正解函数,根据给定的关节角theta,求解出末端位姿p
q=roloot.ikine(p)%ikine逆解函数,根据给定的末端位姿p,求解出关节角q
可以查看p和q,对比theta和q,发现是一致的
5轨迹规划
在实际应用中,我们一般都是知道末端的轨迹,然后使机器人动作。本文的例子是根据给定两个点的值,得到末端位姿,根据末端位姿再来规划轨迹。
clear;clc;%建立机器人模型
%theta
d
a
alpha
offset
Ll=Link([0
0.4
0.025 p1/2
0
]);%定义连杆的D-H参数
L2=Link([p1/2
0
0.56
0
0
]);
L3=Link([0
0
0.035 p1/2
0
]);
L4=Link([0
0.515
0
p1/2
0
]);
L5=Link([pi
0
0
p1/2
0
]);
L6=Link([0
0.08
0
0
]);
robot=SeriaILink([Ll L2 L3 L4 L5 L61,1namel,manman);%连接连杆,机器人取名manman
Tl=transl(0.5,O,0);%根据给定起始点,得到起始点位姿
T2=transl(0,0.5,0);%根据给定终止点,得到终止点位姿
ql=roloot.ikine(Tl);%根据起始点位姿,得到起始点关节角
q2=roloot.ikine(T2);%根据终止点位姿,得到终止点关节角
【q,qd,qddl=jtraj(ql,q2,50);%五次多项式轨迹,得到关节角度,角速度,角加速度,50为采样点个数
grid on
T=robot.fkine(q);%根据插值,得到末端执行器位姿
plot3(squeeze(T(1,4,:》,squeeze(T(2,4,i》,squeeze(T(3.4,:)));%输出末端轨迹
hold on
robot.plot(q);%动画演示
参考文献
[1]王永志.基于LinuxCNC的六軸机器人软件控制系统及运动算法研究[D].华南理工大学,2018.
[2]郭小羽,六轴机器人控制器底层软件设计及其算法仿真研究[D].深圳大学,2017.
猜你喜欢
语数外学习·高中版中旬(2021年11期)2021-02-14
神州·上旬刊(2018年5期)2018-06-05
证券市场红周刊(2018年37期)2018-05-14
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
江苏教育·中学教学版(2017年3期)2017-04-07
中学生数理化·高二版(2016年5期)2016-05-14
农家科技(2014年11期)2015-03-11
绿色科技(2014年3期)2014-07-11
