
基于SH79F1611无刷电机的无传感器控制系统分析和设计
2019-09-09 07:12:18徐德信
佛山科学技术学院学报(自然科学版) 2019年4期
徐德信
(山东省聊城市东昌府区广播电视中心,山东聊城252000)
无刷电机既具有交流电机控制简单、运行可靠、无机械换相以及维护方便等优点,又具有直流电机的优点,如运行效率高、调速性能好,故应用广泛[1],直流无刷电机的广泛应用得益于电力电子技术的迅速发展。虽然带位置传感器的直流无刷电机需要从传感器获得转子的位置,从而进行电机的换相,但是位置传感器增加了电机本体的成本以及装配的难度。尤其在应用条件比较恶劣时,外部环境对位置传感器的信号会产生干扰,从而影响系统的稳定性可靠性。基于以上原因,反电动势的无刷电机控制受到了行业的重视[2-3]。
在无传感器无刷电机控制系统的设计与开发过程中,主要难点在于启动过程及换相检测[4]。目前,在无传感器控制中,启动的方法包括升频升压法、预定位法、三段式启动法、升频和电流调节控制起动法、电压插值起动法以及短时检测脉冲转子定位起动法等。无位置传感器运行在没有传感器的条件下,利用电机的电压和电流获得转子磁极的位置,其方法有反电动过零检测法、定子三次谐波检测法、瞬时电压方程法以及状态观察法等[5-7]。
本文采用预定位法起动电机,运用反电动势过零法确定转子磁极的位置。
1 系统原理
1.1 预定位起动法的原理
预定位起动法的原理是:首先在起动开始时,使无刷电机任意的两相绕组通电,在电磁力的作用下,转子会转到对应的初始位置,实现预定位的目的。然后根据转子的转向及位置改变绕组的通电状态,同时检测非通电相的反电动势过零点,确定转子位置,进行电机控制的换相处理,并根据外部的检测来改变占空比,调整所需的电机转速或转矩等从而达到目标要求。
1.2 反电动势过零点检测方法原理
具有梯形反电动势波形的三相无刷直流电机主电路原理如图1所示。图1中,La=Lb=Lc=L,ea=Ea,eb=Eb,ec=Ec,Ra=Rb=Rc=R。电机工作时,在每个电气角度内只有两相导通通电,调速时各桥臂上管采用PWM调制,下桥恒通。电机三相端电压平衡方程分别为

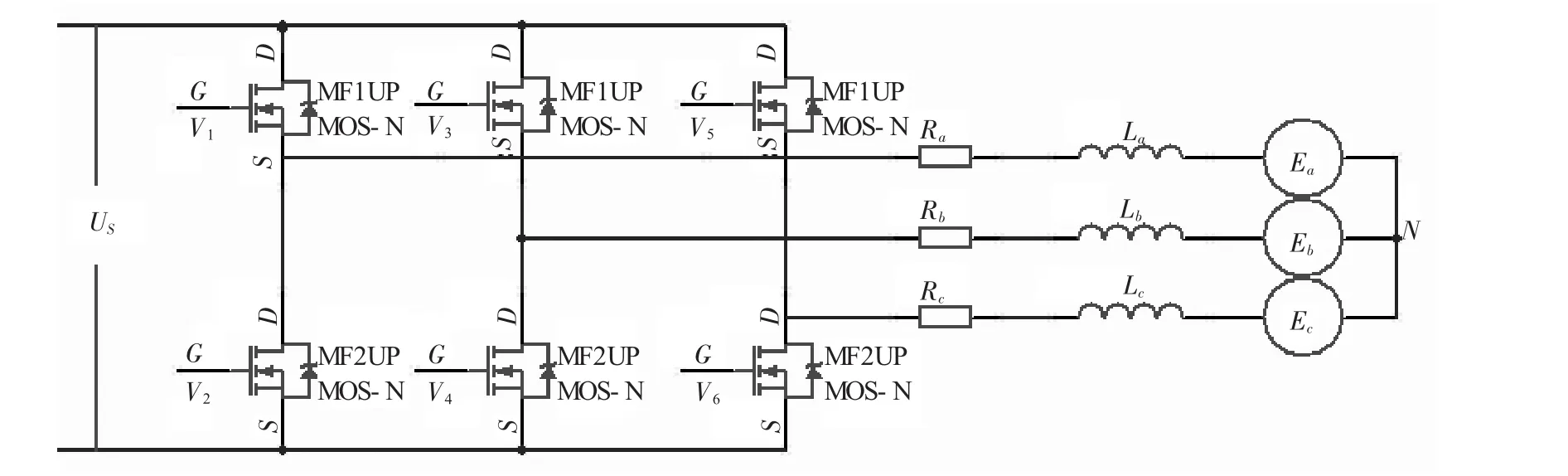
图1 三相无刷直流电机主电路原理
Ua、Ub、Uc分别为各相输出端对 US负极的电压,ea、eb、ec分别为各相的反电动势,UN为电机中性点的电压,ia、ib、ic分别为各相的电流。在60°的电气角度内假设A、B两相导通,这时A、B两相的电流大小相等,方向相反,C相的电流为零。则式(1)、(2)相加则有

式(3)可简化为

由式(4)、(5)可得

同理可得

式(6)~(8)称为反电动势过零检测方程。
在实际的应用中,通常将端电压分压后,经滤波得到检测信号。所谓的过零点检测,就是指不通电那相的反电动势在另两相导通期间发生了大小及正负的变化,正负变化的点称为零点,这个过零点在这两相导通其间的中间,即30°处。故在过零点后,电气角度再过30°,控制程序应使电机进行换相,其原理如图2所示。
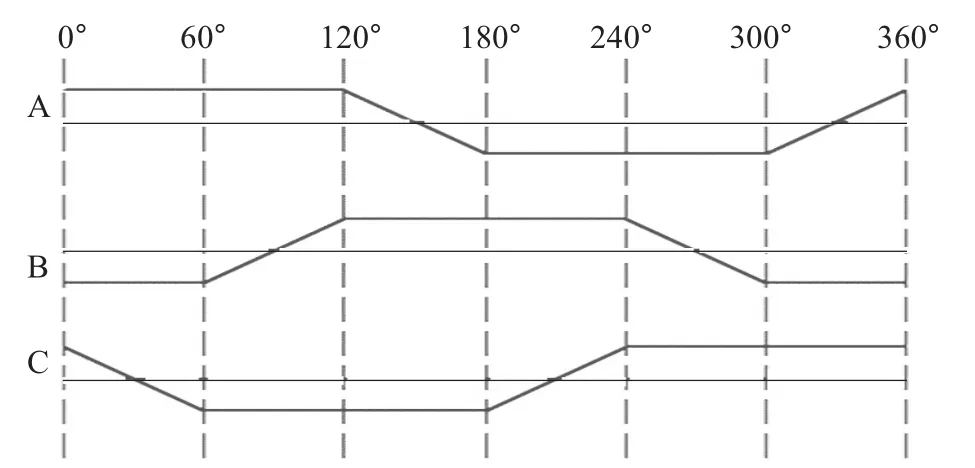
图2 电机三相端电压时序
2 系统的硬件设计
系统采用SH79F1611芯片及内部RC时钟,经倍频处理后,系统的主时钟为27 MHz,系统24 V供电。为了系统的正常工作,系统需要12~15 V和5 V电源,为处理器的外围电路、驱动电路以及电流检测电路所用的芯片提供工作电源。
2.1 SH79F1611单片机介绍
SH79F1611是一种高速高效率的8051兼容单片机,较之传统的8051芯片具有运行更快捷、性能更优越的特性。SH79F1611集成了两路的放大器,12位集成数字比较功能的ADC以及6路带死区时间控制的电机控制PWM模块,非常适合直流无刷电机/永磁同步电机控制。
2.2 硬件的整体框图
硬件整体电路如图3所示。该电路包括:电源电路、反电势过零点检测电路、电流检测电路、单片机系统外围电路、电机驱动、MOS管控制电路及外部用户输入控制电路。电源电路为系统提供所需直流电源,反电动过零点电路提供确定磁极位置电压,电流主要保护电机与控制电路的安全可靠,单片机为控制策略实现提供硬件基础,驱动与MOS管主要为控制电机提供换相。

图3 硬件系统框图
2.3 电源电路
本设计选择LM317及LM2576-5.0,分别输出12 V及5 V,其电路如4所示。LM317输出电压为

在本设计中,R4=10 kΩ,R2=1 kΩ,则Vo约为13.5 V,符合系统所需的12~15 V要求。
LM317及LM2576-5.0的输入端的电解电容C2、C3、C01是为了稳定输入电压,而输出端的电解电容C6、C7则是为了稳定输出电原压。输入与输出的电容C4、C5、C02、C8则是为了滤除高频干扰。续流二极管D3在LM2576内部的开关管导通时处于反向偏置状态,开关管关断时,和电感、负载组成续流回路释放电感中储存的能量。

图4 电源电路
2.4 主电路及驱动电路
主电路如图5所示。该电路采用6个功率管组成的三相桥式结构,电阻R1MP为电流检测电阻,网络标号MGND连接到电流的放大电路。单片机发过的控制信号要经过相应的驱动芯片放大后才能驱动MOS管的导通与关断,IR2103是一款美国IR公司的MOS管驱动芯片,每一个IR2103可驱动一对MOS,即一个半桥。
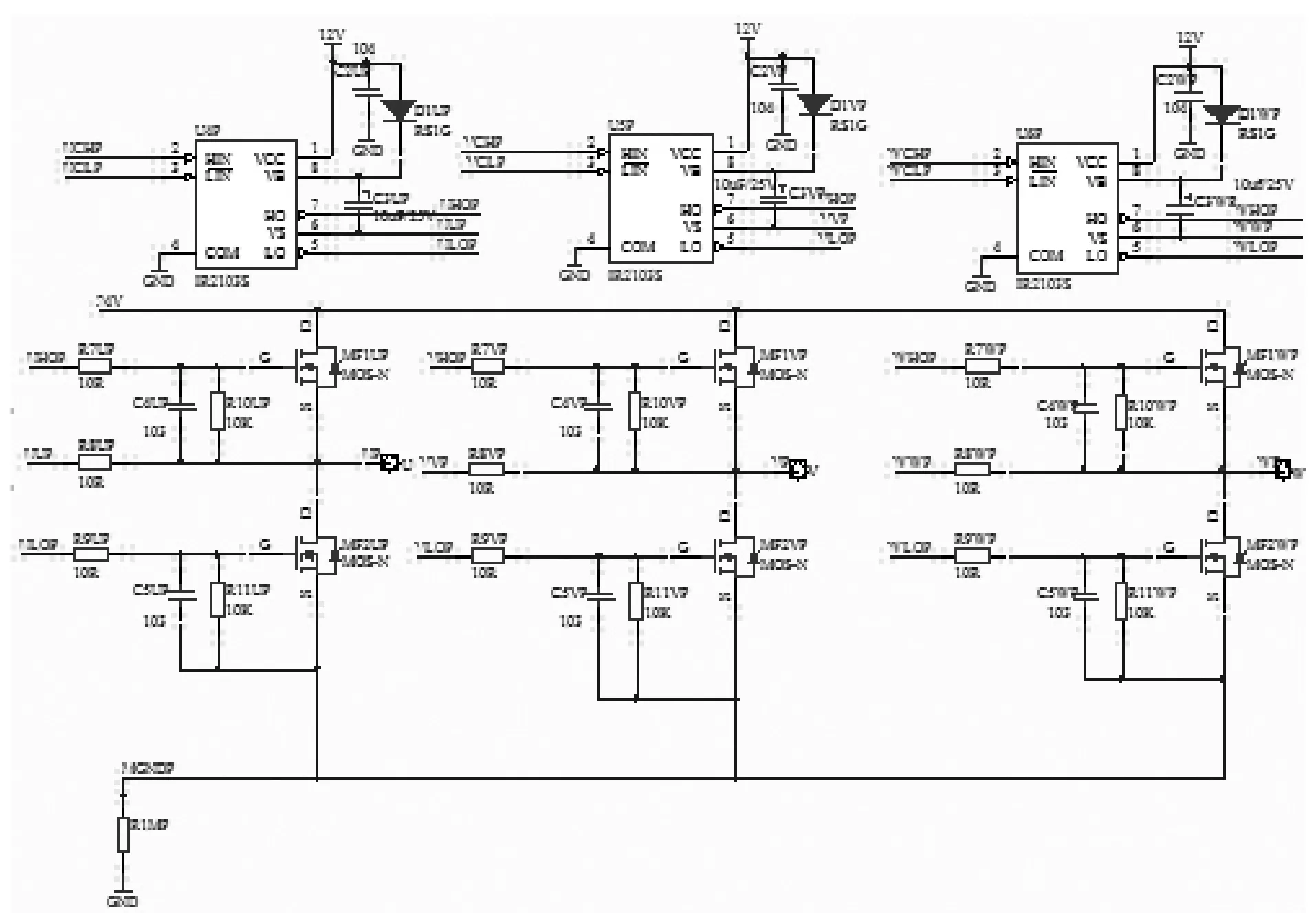
图5 主电路及驱动电路
2.5 电流检测电路
电流电路如图6所示。该电路主要是对采样电阻采得的电流信号进行放大,将电流信号放大后接入单片机,在电流过大时,可通过PID算法进行运算后,控制电机绕组上的电压,从而控制电流。AD_I1检测母线电流,这个电流控制控制器的输入功率。AD_I2可以粗略地检测电机的相电流,控制电机的相电流不超过设定值,保证电机既能输出足够的转矩又不损坏电机与控制器。
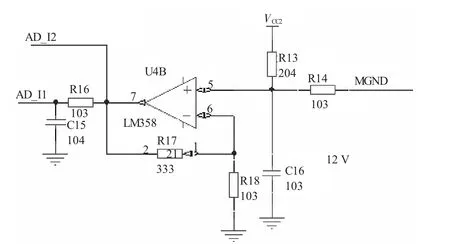
图6 电流检测电路
2.6 反电动势检测电路
反电动势过零点检测电路如图7所示,UP、VP、WP分别接到三相绕组上,WA、WB、WC分别接到SH79F1611的AD输入端口上,通过AD端口检测出电压。
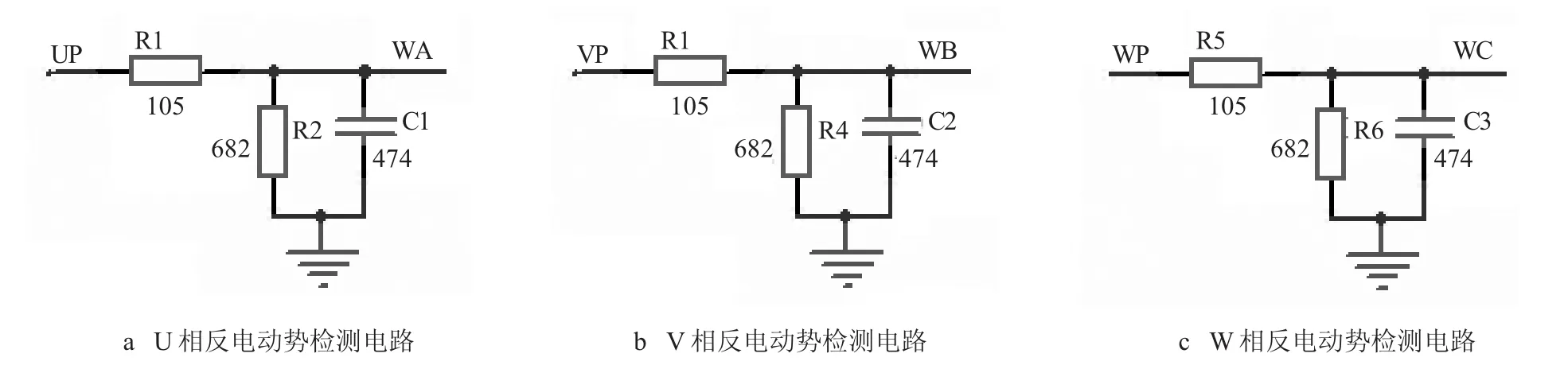
图7 反电动势检测电路
3 软件设计
3.1 软件的整体设计思路
系统上电完成后,软件首先完成系统的初始化处理,包括以下几个方面。
(1)电机正反转控制口的初始化。
(2)电机启动停止端口的初始化。
(3)AD电流采样及用户电机速度/转矩AD采样端口初始化。
(4)电机控制端口PWM模块的初始化,设定PWM的周期为62 μs。
(5)电机端电压检测AD端口初始化。
初始化完成后,程序根据电机正反转、电机启动停止、用户电机速度/转矩AD采样端口的数据,决定电机的启动还是停止。当电机启动后,根据电机端电压检测AD的数据,并根据所采集的数值经式(6)~(8)计算,进行换相处理。
3.2 无传感器无刷电机的起动控制
根据检测到用户需要启动电机并且电机没有运转,则进行电机启动程序的运行,程序控制电机的三相绕组的两相通电,如A、B两相进行通电,由于电磁力的作用,电机会转到一初始位置,此时根据读取的三相电压的值,确定转的磁极位置,对相应的电机绕组进行导通与关闭。
3.3 反电动势无刷直流电机的过零点检测换相
预定位起动电机后,可以进行反电动机的过零点检测。其过程如下所述。
(1)通过ADC采集并滤波得到三相信号。
(2)根据电机当前状态及反动势方程,查看是否发生了过零点事件。
(3)当检测到过零点后,保存定时器1的值,并复位定时器1。将保存的定时器1的值除以2再减去滤波器的延时、处理延时及相位超前,所得结果即为换相时间。
(4)将换相时间赋于定时器2,如定时器2中断时,就则进行的换相处理。
4 实验验证
实验验证所采用电机为24 V、3 200转。运用示波器测得相线电压波形为梯形波,如图8所示。由图8可知,该方案可行。
5 小结
该系统通过利用SH79F1611丰富的片内资源控制,电机无传感器的启动、过零点的检测以及算法的实现都是由软件来完成的。从而使电路的硬件结构简单,极大地提高了系统的可靠性。实验证明,该系统具有良好的调速性能,电机转子位置检测准确性好。该系统在新能源客车散热水泵、风扇等方面得到了应用,应用结果表明可靠好。
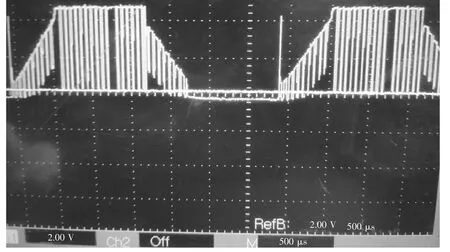
图8 电压波形
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02 02:33:32
郑州大学学报(工学版)(2020年2期)2020-06-16 12:43:14
数理化解题研究(2020年13期)2020-05-07 03:29:02
数学物理学报(2019年5期)2019-11-29 07:46:30
电子制作(2019年10期)2019-06-17 11:45:00
汽车电器(2019年2期)2019-03-22 03:35:16
高中生·天天向上(2016年9期)2016-11-22 09:10:34
电机与控制应用(2015年7期)2015-03-01 03:50:10
河南科技(2014年5期)2014-02-27 14:08:32
科技创新导报(2012年15期)2012-04-29 19:36:25
