曲率约束的激光点云全局优化配准算法
2019-09-09 09:16:46马伟丽王健孙文潇
遥感信息 2019年4期
马伟丽,2,王健,孙文潇
(1.山东科技大学,山东 青岛 266590;2.山东省水利勘测设计院,济南 250101)
0 引言
在物体表面三维重构[1]中,点云数据配准是最为重要的步骤。使用三维激光扫描技术[2-3],可以得到被测物体表面点云数据,通过在多个视角下测量的点云数据,然后对多测站数据进行配准,最终获得完整的三维物体模型。点云数据配准精度,对三维物体模型重构和应用有着直接的影响。
目前,国内外提出了很多数据配准的算法,其中使用最为广泛的算法就是1992年Besl等[4]提出的迭代最近点算法(ite-rative closest point,ICP)以及它的改进算法[5-6]。为了使数据配准的结果更加准确,ICP算法使用时必须要满足2个条件:点云之间存在包含关系、点云之间初始位置不可以相差过大。数据配准常用方法有:特征点提取法[7-10],根据曲率特征、法向量等信息提取特征点,由得到的特征点对完成配准;质心重合法[11],计算点集的质心,并将2个点集作相对于质心的平移;标志点法[12-13],人工粘贴标志点,通过标志点配准。上述配准方法,对点云间位姿和噪声程度有严格要求,同时容易陷入局部最优。
针对上述点云数据在配准中存在的问题,本文采用散乱点云建立的曲率信息研究点云的配准方法,在基于曲率特征配准的基础上,引入现在比较成熟的模拟退火法(simulated annealing,SAA)对点云数据拼接误差的参数进行寻优,避免局部最优。因此提出基于随机抽样一致性算法(random sampling consensus,RANSAC)提取曲率特征点,然后用距离最近原则寻找对应点对,最后使用模拟退火法防止陷入局部最优完成最终配准。
1 经典ICP算法
经典ICP算法[14]利用最小二乘最优匹配原理,通过迭代进行点云之间的刚体变换。首先已知两块待配准的重叠点云M和N,其中M为待配准点云,N为参考点云。M点集中的每一点Mi以最小距离原则在N中寻找对应点,对应点构成新的点集。所有对应点对的拼接误差[15]
(1)
式中:Mi为目标点集;Ni为待配准点集;n为匹配点对总数;λ、R、T分别表示点集M与点集N之间刚体变换的缩放参数、旋转参数、平移参数。反复迭代求出满足式(1)且收敛于给定阈值的转换参数,即为ICP算法配准的最终目的。ICP算法过程描述如下:
①寻找对应点对M’、N’;
②计算配准转换参数λ、R、T;
③修正待配准点云M得到新的点云M’;
④计算相邻两次迭代点集的距离差值di,点对匹配均方差收敛于阈值τ,即di-di+1<τ,则停止迭代,否则令i=i+1,并返回步骤①。
2 改进ICP算法
2.1 曲率特征点集的提取
数据配准时,对于待配准点云M和基准点云N,如果对所有点云进行匹配点的搜索,会非常繁琐且浪费时间,同时因为噪声的存在也会对特征点的选取产生影响。本文在进行曲面拟合局部点云时,加入RANSAC算法,以消除噪点的影响,最后利用曲率极值法来提取曲率特征点。
在三维欧几里得空间中,几何体结构的特征主要由曲率和法矢量来描述[16]。曲率是一种不随平移、旋转、缩放变化的特征,该特征可用高斯曲率KG、平均曲率KM、主曲率k进行描述,首先引入曲率度量公式[17]
(2)
(3)
式中:k1代表最大曲率;k2表示最小曲率;α代表度量曲率相似度。通过公式(2)、公式(3)度量曲率相似度,提取出具有相似结构的点云,然后配准2片点云。特征点提取的具体步骤描述如下:
①选任意一点为种子点,选取K领域计算包含的点个数,计算迭代次数L[18]由式(4)得出:
(4)
(5)
式中:A为点云数;a为拟合曲面方程所需最小点个数,在本文中a=6,P为a个点均为有效点的概率;ε是数据的错误率,表示局外点与总数据量之比。
②对点云任意一点,建立邻域点集合,设曲面方程[19]为
(6)
在K邻域内随机选取a个点,计算Qij的初始参数。
④重复步骤②~③,直到循环次数达L次,找到最大局内点,由参数曲面方程解出最优参数Qij。

(7)
(8)
⑥由求得的高斯曲率与平均曲率可直接求解主曲率
(9)
(10)
⑦判断该点主曲率k1或k2在对应的主方向上是否为极值,若为极值,则保留该点,进行下一个种子点判断。重复步骤⑦~⑧,直到遍历完所有的数据。
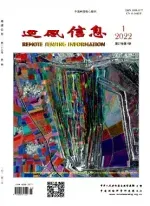
⑧曲率极值越大特征越明显。为曲率极值设定一个阈值ω,大于该设置阈值则保留曲率特征点,反之删除。选取曲率特征点集流程图如图1所示。
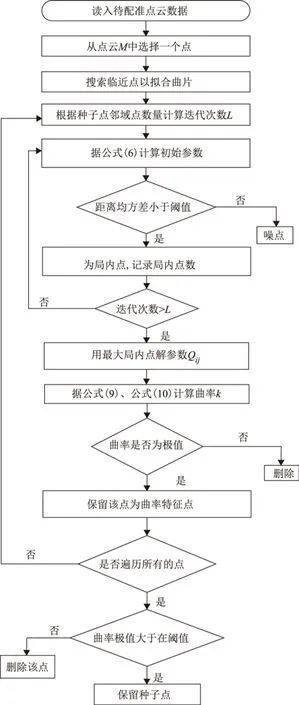
图1 选取曲率特征点集流程图
2.2 获取全局最优转换参数
配准的过程即是求解待配准点云到基准点云的缩放参数λ、刚性旋转R和平移T的过程。待配准点云M中的A点和基准点云N中的B点,表示的是地球表面物体的同一个点,可以通过缩放、旋转和平移变换把A点和B点重合在一起。A点坐标XA,YA,ZA,B点坐标XB,YB,ZB,转换的公式为:
(11)
在实际测量中,点云的采集不可避免带入噪声,虽然根据曲率特征选取特征点,以距离最近为判断依据获得相对应的特征点对,但是点云间数据没有绝对的一一对应关系,因此引入模拟退火法,得到使目标函数最小的最优转换参数λ、R、T,避免配准时出现局部最优解。目标函数的形式多样化,本文使用拼接误差公式(1)作为目标函数。
在1953年,Metropolis[20]等率先提出了模拟退火法。模拟退火法是一种非线性反演,能够避免使反演陷入局部极大值,是一个不断寻优的过程。在此过程中,拟合度随迭代次数的增加呈现一种跳跃起伏的现象,但总体的趋势是变小或变大,然而正是由于模拟退火允许拟合误差变大或拟合度变小,进而使得模型从局部的最优值中跳出来,最终得到全局的最优化模型。因此引入模拟退火法,在点云拼接过程中以拼接误差Eλ,R,T为目标函数,进行优化求解。
在模拟退火法的迭代过程中,要求温度随着迭代次数的增加而缓慢降低,由冷却进度表控制温度t的逐步下降,同时依概率接受恶化解。接受概率参数是关于温度t的函数,随着t不断的降低,接受概率也不断降低,直到最后不再接受任何恶化解。本文采用双曲下降型[21]退火方案。模拟退火法寻找转换参数的最优具体解步骤:
①初始化目标函数模型参数λ0、R0、T0,确定参数变化范围,选择初始温度t0=1°。
②计算目标函数值E0λ0,R0,T0。
③对当前模型参数进行扰动,产生新的模型参数λ1、R1、T1。
④计算新模型参数下的目标函数值E1(λ1,R1,T1)。
⑤计算目标函数差ΔE,ΔE=E1-E0。
⑥判断新模型参数是否接受,依Metropolis准则[22]为判断依据:若ΔE<0则接受;若ΔE>0,则新模型参数以概率P进行接受。
P=exp-ΔE′/t
(12)
式中:t为温度。
⑦接受新的模型参数时,设置λ0=λ1,R0=R1,T0=T1。
⑧在温度t下重复一定次数的扰动接受。
⑨降温t
tG=t0αG1/a
(13)
式中:t0为初始温度;G为迭代次数;α为给定常数,本文α=1。
⑩重复步骤③至⑨,直到收敛条件满足。
2.3 改进ICP算法流程
改进配准点云的ICP算法步骤如下:
①读取需要配准的2个点云:待配准点云M,基准点云N。
②利用RANSAC算法的二次曲面法对其K邻域进行曲面拟合。
③根据结合式(9)、公式(10)计算该点主曲率k1、k2,并判断是否为曲率极值点,遍历所有点云数据,并删除小于阈值μ的曲率特征点,得到基准点集M’。
④根据②、③计算待配准点云数据的曲率特征点,得到待配准点集N’。
⑤令为M’0、N’0迭代运算初始点集
⑥以距离最近为依据,查询特征点对(M’0、N’0)。
⑦根据步骤⑥获得的对应点集使用四元数法计算,获取缩放参数λ、旋转参数R、平移参数T。
⑧使用步骤⑥获得的λ、R、T对点云M利用公式(11)进行变换,得到新的点云。
⑨依模拟退火法判断是否为全局最优,既公式(1)全局最小,是则保留,否则重复⑤至⑧直到拼接误差为全局最优,最终完成配准,算法流程图如图2所示。
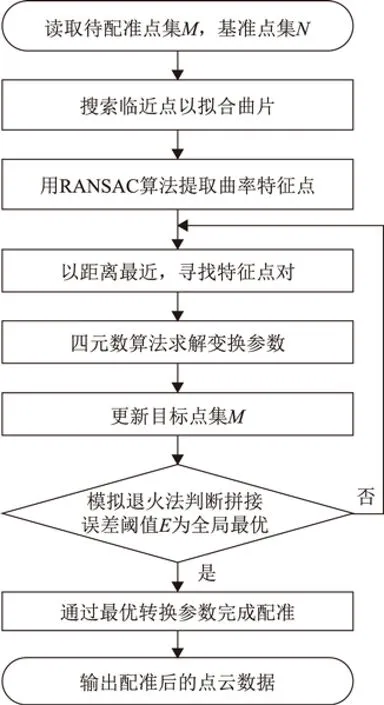
图2 算法流程图
3 实验验证与结果分析
为了验证本文算法的正确性、有效性和实用性,进行以下2组实验。实验数据采用斯坦福大学的Horse点云模型和Trimble TX8扫描仪采集某教学楼点云数据进行数据配准实验。所选用的2组数据都有十多种点云视角数据,在每组数据中随机选取2种视角进行配准,并与经典ICP算法进行比较。本文算法是在经典ICP算法基础上进行的改进,算法中加入了噪声点的剔除和避免出现局部最优,使其相对于经典ICP算法针对部分重叠点云的配准问题得到较好的结果。实验在Matlab 2010b软件环境下编程实现。
3.1 实验一

图3 Horse点云配准结果
为验证本文方法的正确性,本文对所选用斯坦福大学的Horse点云数据进行配准,并将本文方法与经典ICP算法配准结果进行比较。图3为Horse点云配准结果图,红色点云为基准数据,绿色点云为待配准数据,其中图3(b)为经典ICP算法配准结果,图3(c)为本文所提改进算法配准结果。
从图3可以直观地看出采用经典ICP算法配准结果较差,两站点云不能很好地贴合在一起,虽然两站点云有一部分可以配准在一起,但是仍有大量点云数据配准失败;而本文所提算法配准结果较好,经计算对应特征点对距离中误差为2.7×10-3mm。虽然本文所提算法会增加配准时间,但配准结果可以体现出本文所改进的算法可以很好地克服经典ICP算法容易陷入局部最优解的情况。
3.2 实验二
为验证本文算法的通用性和实用性,选取Trimble TX8扫描仪采集某教学楼的点云数据为实例进行验证。所选用的某教学楼点云数据有十多站点云视角,在实验数据中随机选取两站数据进行配准,并与经典ICP算法进行比较。图4为两站点云配准前后对比图,红色点云为待配准点云M,绿色点云为基准点云N。未配准的两站数据如图4(a)所示,用本文算法配准后点云数据如图4(b)所示。

图4 整体点云配准前后对比图
本文为验证该方法的稳定性和避免局部最优,采用2种算法对某教学楼的2个不同视角的点云进行配准。图5为2种算法局部配准结果图,其中图5(a)为ICP经典算法的精确配准图,图5(b)为为本文算法的精确配准图。

图5 2种方法局部配准结果
从图5可以直观地看出利用经典ICP算法配准后,待配准数据和基准点云数据之间有倾斜、错层现象。本文所提算法使两站点云数据相互重合优于经典ICP算法。因此,利用本文算法可以更为精准地进行配准,同时稳健性更强。
为定量描述本文方法的配准效果,在配准后的点云数据中选取房屋角点作为特征点,计算配准后对应角点的距离,绘制距离误差图,如图6所示。在获取到的点云数据中,很难找到2个对应的点数据表示真实物体的角点,本文利用平面拟合获取待评价角点周围的3个平面信息,进而通过3个面相交得到角点坐标。
图6 配准后对应角点距离残差
从图6可以清晰看出利用经典ICP算法配准后,大部分检核点的配准误差在2 mm左右,但有部分检核点配准误差大于5 mm,这是由于通过经典ICP算法进行配准,出现局部最优情况而产生影响。本文算法在提取的特征点时加入结合RANSAC算法,从而去除噪声的影响提取特征点,同时利用模拟退火算法得到最优的转换参数,使配准误差优于2.5 mm,且误差分布较均匀。实验配准图和实验获得的对比数据,充分表明本文所提配准方法比经典ICP算法更稳定、精度更高。
4 结束语
在多视角测得散乱点云数据的情况下,利用经典的ICP算法得到的配准结果稳定性不高,容易陷入局部最优。针对这一问题,本文在经典ICP算法的基础上,引入了一种模拟退火算法寻找全局最优的配准方法。该方法的核心思想是结合RANSAC算法剔除粗差点从而达到稳健的效果,采用模拟退火算法避免点云配准陷入局部最优使得拼接误差最小,得到全局最优完成数据精确的配准。实验结果表明,本文数据配准算法提高了配准的稳定性和配准精度,能够满足多视角点云数据的配准要求,验证了本文提出算法的可行性。
猜你喜欢
中国港湾建设(2022年12期)2022-12-28 05:28:26
数学物理学报(2022年4期)2022-08-22 04:07:52
数学物理学报(2019年5期)2019-11-29 07:46:28
读者(2019年20期)2019-10-09 03:34:59
环球时报(2019-01-04)2019-01-04 06:17:07
测控技术(2018年3期)2018-11-25 09:45:08
中国国家旅游(2016年3期)2016-09-21 09:48:00
电测与仪表(2016年17期)2016-04-11 12:38:44
电源技术(2015年5期)2015-08-22 11:18:24
城市轨道交通研究(2015年3期)2015-02-27 11:01:36