
复数域HRRP图像识别综合仿真平台设计∗
2019-09-03 06:46泮益恒
舰船电子工程 2019年8期
赵 晅 泮益恒
(1.海军工程大学 武汉 430022)(2.92916部队 三亚 572000)
1 引言
复数域高分辨率一维距离像(Complex High Resolution Range Profiles,C-HRRP)识别在一定程度上优于实数域高分辨率一维距离像(High Resolution Range Profiles,HRRP)图像识别,且近几年来国内外逐渐展开了在全极化领域的HRRP图像的研究,并逐渐成为研究的热点[1~2]。为了方便在复数域HRRP图像研究方面进行后续研究工作,本文基于Matlab appdesigner设计完成了一套综合软件仿真平台CP-HRRPro(Complex Polarimetric High Resolution Range Profiles data Processor),该软件仿真平台主要包括以下四个子模块:单极化复数域HRRP仿真模块、全极化复数域HRRP混合数据仿真模块、单目标分类识别模块和识别性能评估模块。本文首先从需求的角度分析了该软件系统的总体功能以及各个模块的功能,给出了软件设计思路,最后针对软件各项功能进行实现并得到测试结果。
2 基于PPCA统计识别流程
在雷达自动目标识别的研究中,模型的构建大多都是基于高斯分布的,概率主成分分析(Probabilistic Principal Component Analysis,PPCA)模型就是其中的一种[3~4]。给定的实数样本 y可以根据PPCA模型表示为如下形式[5]:

其中,矩阵 A为d×q(q <d )维加载矩阵,向量μ为d×1维的均值向量,q×1维的向量z是对应的隐变量,并且 z满足 z~G(z|0,Iq),G(z|0,Iq)表示z服从均值为0,协方差矩阵为q×q维的单位阵Iq的高斯分布,ε是 d×1维的噪声向量,且ε~G(ε|0,σ2Id)[6]。通过采用期望最大化(Expectation Maximization,EM)算法可以得到参数估计值[7],并将参数估计放入模板库中用于目标识别。具体识别流程如图1所示[8]。
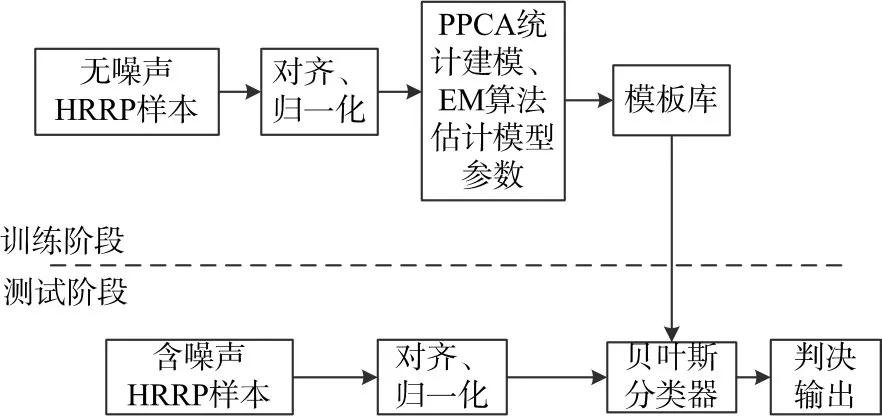
图1 基于PPCA统计识别流程图
根据图1所示的流程图可以看出,HRRP样本的获取是进行目标识别的基础,在贝叶斯分类器下的判决输出的结果决定了目标的识别率。为了方便快速地得到目标识别结果,并且将研究领域扩展到全极化复数域,本文设计了一套综合仿真软件CP-HRRPro。根据识别流程,对该软件做出如下几个功能定位:1)能够实现对单极化复数域HRRP的数据仿真;2)能够实现全极化复数域HRRP数据仿真;3)能够进行单目标的分类识别;4)能够得出识别性能评估结果。基于上述的软件功能定位,结合 Matlab appdesigner软件设计方法[9],将软 件CP-HRRPro的总体功能设计框图总结如图2所示。
下面主要对CP-HRRPro软件的各个具体的子功能模块的任务需求进行分析并完成对程序具体结构的设计。
3 软件平台设计
3.1 单极化复数域HRRP仿真模块
单极化复数域HRRP仿真模块是进行复数域单极化复杂目标HRRP分类实验研究的基础,该模块分为四个部分功能:GTD典型目标一维空间分布仿真、GTD典型目标二维空间分布仿真、GTD典型目标三维空间分布仿真、目标运动影响分析仿真。图3为单极化复数域HRRP仿真模块结构框架,仿真时首先需要通过设置各仿真条件下的仿真次数、发射信号和、特征结构以及GTD特征,然后调用GTD散射特性描述的关键参数,在进行多组数据仿真时,还需引入噪声信号发生器产生多组独立噪声信号,通过与HRRP仿真结果进行叠加得到最终结果输出。最后通过数据保存与传递功能进行数据的输出以及软件内部的数据传递。此外,本模块还可以进行对目标运动对HRRP成像的影响进行分析。
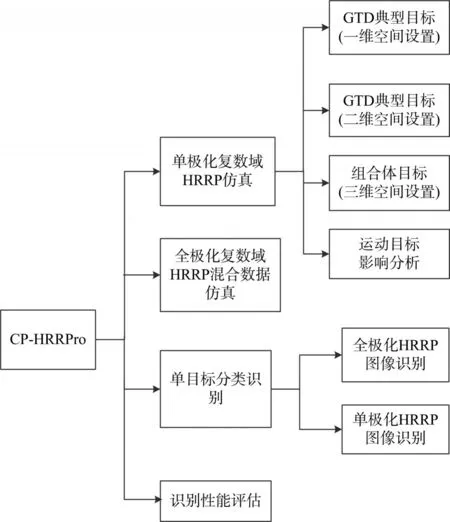
图2 CP-HRRPro软件功能框图
3.2 全极化复数域HRRP混合数据仿真模块
全极化复数域HRRP混合数据仿真是本文数据仿真的另外一个重要组成部分,为了使仿真更贴近真实情况,参考典型的全极化实数域HRRP仿真方法,采用CST软件[10]导入外部目标模型,通过信号激励获取目标的原始全极化散射回波后进行匹配滤波的方式,得到全极化复数域HRRP仿真图像[11]。此外,为了进行蒙特卡洛实验,还支持通过信号噪声发生器与全极化复数域HRRP图像进行叠加,仿真的结果输出通过软件的数据保存与传递功能进行操作。
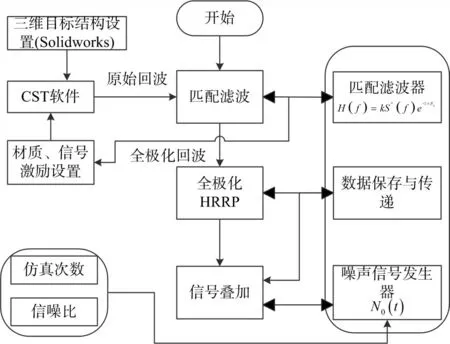
图4 全极化复数域HRRP数据仿真模块结构框架
3.3 单目标分类识别模块
单目标分类识别是验证识别算法有效性的有效工具之一[12],进行单目标分类识别时,程序处理按照如图5所示的单目标分类识别模块结构框架进行执行。首先进行录入数据,在录入数据时可以分别通过实部虚部法和幅度相位法录入,然后用户可以选择单极化或全极化识别算法,然后进行识别匹配,最后得到结果输出以验证算法对单次目标识别分类的有效性。其间还可以通过多视处理的操作验证视数对单次目标识别的影响。
3.4 识别性能评估模块
识别性能评估模块是本软件仿真平台的核心模块,程序执行时按照图6所示的识别性能评估模块结构框架图进行。切换到该面板时,用户首先需要进行数据的录入,然后从实数域、复数域以及单极化和全极化对识别算法进行选择,并且可选择是否进行多视处理。针对每一种算法类,实数、复数和多视都可以进行独立选择。完成对算法的选择后,将进行识别匹配,通过蒙特卡洛实验多次统计识别率,即可获取所需的检测性能曲线输出。需要注意的是,一次评估结果只能处理单个角度目标,若需处理多角度目标,则需要进行多次数据录入,通过模块内嵌的数据保存与传递功能,可以将每个角度所得到的检测性曲线进行保存,并将用户多次重复实验的结果进行综合处理得到各角度条件下对目标识别的检测性能输出。
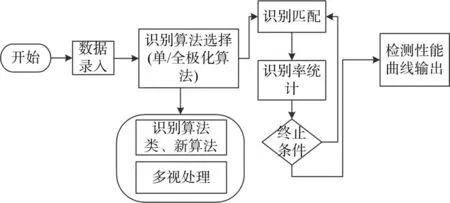
图6 识别性能评估模块结构框架
4 软件平台实现与测试结果
复数域HRRP目标识别综合仿真平台的最上方为主菜单栏选项,其下一层为二级菜单栏。选择菜单栏的单极化复数域HRRP仿真,即可进入该仿真模块窗口,该模块可以完成一维到三维空间设置所得目标的HRRP仿真图像并能完成运动目标对HRRP影响分析。图7(a)所展示的为二维空间设置目标所得到的HRRP幅度函数与相位函数图。右下角的四个操作按钮可以方便地将获取的HRRP仿真图像进行后续处理,其中包括数据存储、分类识别以及性能评估。
图7(b)所示为全极化复数域HRRP仿真窗口,该界面的下方是数据录入模块,可选择两种数据录入方式,分别为实部、虚部录入和幅度、相位录入方式。此外,该窗口可以同时对三类目标进行数据仿真,并通过面板上方的极化选择可分别得到HH极化、HV极化、VH极化、VV极化的HRRP仿真图像。图7(b)所展示的为第一种数据录入方式下的HH极化HRRP三种目标的HRRP幅度图像与相位图像仿真结果。
图7(c)所示为单目标分类识别窗口,该功能窗口下方为数据的录入以及参数的设置,面板左上方为HRRP仿真图像的显示以及判别,右上方则为识别结果的输出。首先将HRRP数据进行录入,可分别得到已知目标和待测目标的HRRP幅度仿真图,然后将待测目标HRRP图像与三类已知目标仿真所得到HRRP进行相似度比对,并输出所得到的识别结果,即目标舰船类型。
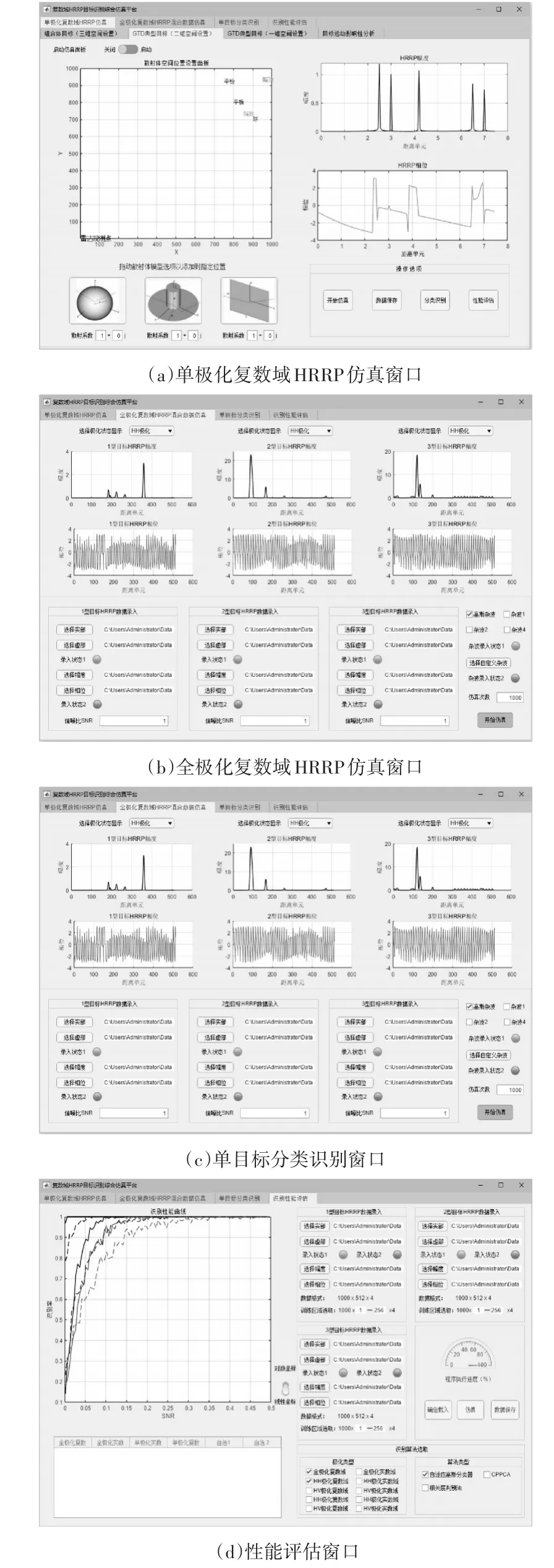
图7 软件综合仿真平台CP-HRRPro各功能窗口
识别性能评估模块是本软件的核心模块,其界面如图7(d)所示。性能评估窗口可完成三类目标在全极化和单极化的识别率曲线图。该界面右上方为三组目标的数据录入,其录入的两种形式与之前所介绍的数据录入形式一致。界面的右下方为识别算法的选取,其中包括极化类型的选择和算法类型的选择,界面左侧则为仿真输出结果图显示。图7(d)所示的为选择在自适应高斯分类器下,对三种目标分别进行全极化复数域识别和HH极化复数域识别所得到的识别性能曲线图。在该操作界面的最右侧有该界面仿真实验的控制按键,可以完成确定数据载入、执行数据仿真以及数据保存等操作。
5 结语
本文基于Matlab appdesigner设计完成了一套综合软件仿真平台CP-HRRPro,该仿真软件能够实现单极化HRRP仿真、全极化HRRP仿真、单目标分类识别实验以及不同极化在实数域和复数域的分类性能评估四项功能仿真。可以方便完成对参数的设置和更改以及数据的录入、用户可以更加直观地根据需求显示特定的结果,为后续继续在复数域HRRP开展研究工作提供了便利,具有一定的实用价值。
猜你喜欢
航天电子对抗(2022年2期)2022-05-24
中学生数理化(高中版.高考数学)(2021年11期)2021-12-21
北京航空航天大学学报(2021年9期)2021-11-02
小猕猴学习画刊(2021年9期)2021-10-11
中学生数理化(高中版.高二数学)(2021年4期)2021-07-20
中学生数理化(高中版.高二数学)(2021年4期)2021-07-20
雷达学报(2021年1期)2021-03-04
航天电子对抗(2019年4期)2019-06-02
小天使·一年级语数英综合(2017年11期)2017-12-05
初中生世界·七年级(2017年9期)2017-10-13
