螺栓应力的超声测量
2019-08-29 02:11赵春华1张志远2肖嘉伟2肖智生
无损检测 2019年8期
赵春华1,2,张志远2,肖嘉伟2,肖智生
(1.三峡大学 水电机械设备设计与维护湖北省重点实验室, 宜昌 443002;2.三峡大学 机械与动力学院, 宜昌 443002; 3.六一二中船重工海声科技有限公司, 宜昌 443002)
风力发电是较为成熟的可再生能源技术,越来越受到世界各国的重视。偏航制动器作为风力发电机组的重要组成部分,作用是使风轮始终处于迎风状态并且提供必要的锁紧力矩,该制动器的螺栓作为紧固件,对整个系统的稳定性都有很大的作用,若出现松动或断裂将影响整个机组的安全。因此,对其螺栓的故障诊断及在线监测的研究十分有必要。
目前对螺栓应力的故障诊断研究有很多。同济大学刘镇清推导出螺栓应力与超声波声时差的公式[1],并研制了一种可直接测量螺栓轴向应力的超声测量设备。浙江大学张俊研究了超声发射接收原理、高精度声时测量原理、声耦合原理等关键技术[2],通过测试仪对螺栓应力试验曲线进行了拟合。
笔者通过对偏航制动器螺栓进行声时差-应力关系的标定试验,得出声时差与应力之间的线性关系,由此得出型号螺栓的材料系数;则对于已紧固的螺栓,只需测量出时间差就可得出螺栓的实时应力值。由于偏航制动器工作环境较为恶劣,难以进行人工测量,故将压电传感器永久固定在风电机组上,通过LABVIEW用户界面实时观察螺栓轴向应力的工作状态。
1 基于声弹性理论的测量原理
在同一温度下,螺栓应力与超声波在螺栓中的声时差成正比[3],故对于偏航制动器的同批次螺栓,只要事先标定一个螺栓的声时与应力的关系系数A,则对其余螺栓,只需测量声时差就可以得出其应力值。根据声弹性理论,固体中的声速与应力σ有关,用Cσ表示超声波在有应力时的声速,C0表示超声波在无应力时的声速,则有
(1)
式中:K为与螺栓材料弹性常数有关的常数。
设L0为无应力时的螺栓长度,Lσ为加载应力后的螺栓长度,则有
(2)
式中:E为杨氏模量。
设t0为螺栓无应力时,声波信号在螺栓内部的飞行时间,tσ为螺栓有应力时,声波信号在螺栓内部的飞行时间,则有
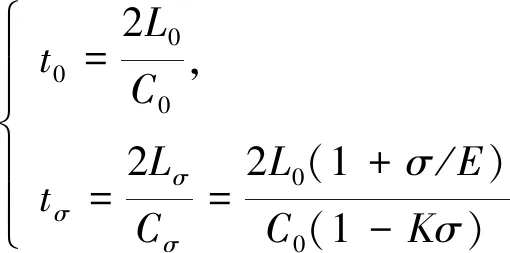
(3)
所以由式(1)(3),得到声时差Δt为

(4)
Δt=2×AL0σ
(5)
以上分析表明,螺栓的轴向应力与超声波飞行的声时差是直线关系,故只要事先计算出螺栓系数A,即对偏航制动器螺栓做标定试验,则实际应用中,只需测量声波的飞行时间就可得到此时螺栓所受的应力。
2 换能器的设计
收发一体式换能器具有优势且精度较高,为了使超声波束集中在螺栓底部,根据实际螺栓尺寸设计了换能器参数,并采用窄脉冲锆钛酸铅换能器。
超声波换能器结构设计主要需考虑探头中心频率f、直径Ds和半扩散角θ0。选择换能器中心频率f为5 MHz时,声波在钢中的传播速度CL=5 900 m·s-1,设波束在界面的平均声压相同,未扩散区(即螺栓总长度)b=363 mm,则由公式b=1.64N(N为近场区长度)可得N=220.73 mm。
而N与超声波换能器的直径Ds的关系可用式(6)表示
(6)
则由式(6)可计算出Ds≈32.28 mm。
由式(7)可得到θ0半扩散角(即探头开角)为
(7)
实际工况下,超声波波束在螺栓的有效直径之内(即波束全部打在底面反射)时,接收到的回波信号才不会产生干扰信号,开角满足设计要求。综合考虑偏航制动器以及螺栓的工作环境、尺寸和技术要求,确定换能器选用5 MHz的中心频率。
3 超声波声时差计算
现场偏航制动器的螺栓尺寸如图1所示。试验时对该螺栓进行了超声波测试,即在螺栓头部涂抹机油,使用所设计的换能器压在螺栓头部,通过探头发射超声波脉冲,脉冲入射到螺栓底部时发生反射,超声波从发射到接收所经历的时间即为声时差[4]。
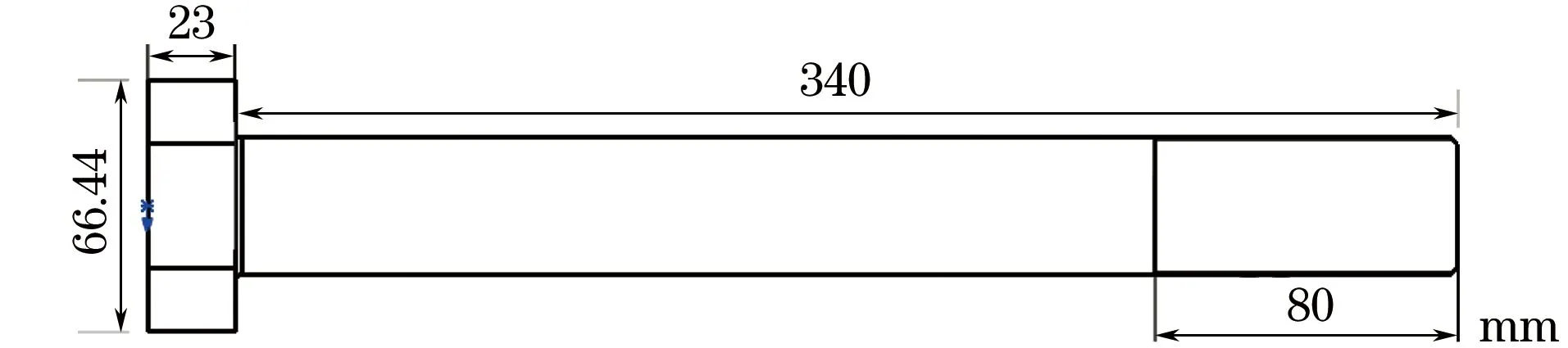
图1 偏航制动器螺栓尺寸
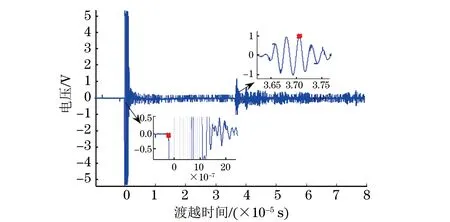
图2 示波器采集的超声波回波
为了保证超声波声时测量的准确度,采用分辨率为1 GS·s-1的示波器,图2为示波器采集的超声波回波,首先测量无应力状态下的超声波飞行时间,然后在试验机上进行拉伸,模拟螺栓的轴向应力,测量有应力时的飞行时间,图中超声波飞行时间的起点为第一个波的过零点,终点是回波信号中的最大幅值点,二者的差值为超声波在螺栓内部的飞行时间,根据式(5)求出声时差即可得到螺栓的轴向应力。
超声波应力测量系统主要是通过测量声波发射接收前后的声时差,得到螺栓轴向应力的,测试时应首先对螺栓做标定试验以求出材料系数。用试验机对螺栓进行拉伸以模拟轴向应力,在软件MATLAB中处理数据完成螺栓标定直线的拟合,经过多次重复试验可看出螺栓的系数A近似为一个定值,如图3所示,与理论推导出的式(5)的结果一致,说明超声波声时差与轴向应力存在良好的线性关系。得到标定系数后将其输入到人机监测程序中,则可实时测量偏航制动器螺栓所受的轴向应力。
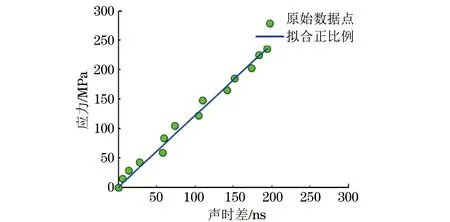
图3 偏航螺栓的应力-声时差关系
然后,在LABVIEW平台上使用函数节点功能对数据采集卡进行控制,采集卡将模拟信号转换成数字信号输入到计算机内存中,工作人员将试验得到的应力与声时差关系函数输入到程序里,由程序计算出螺栓应力大小,最终结果再在人机界面上实时显示出来(见图4),若螺栓出现松动或断裂,则报警给远程工作人员。
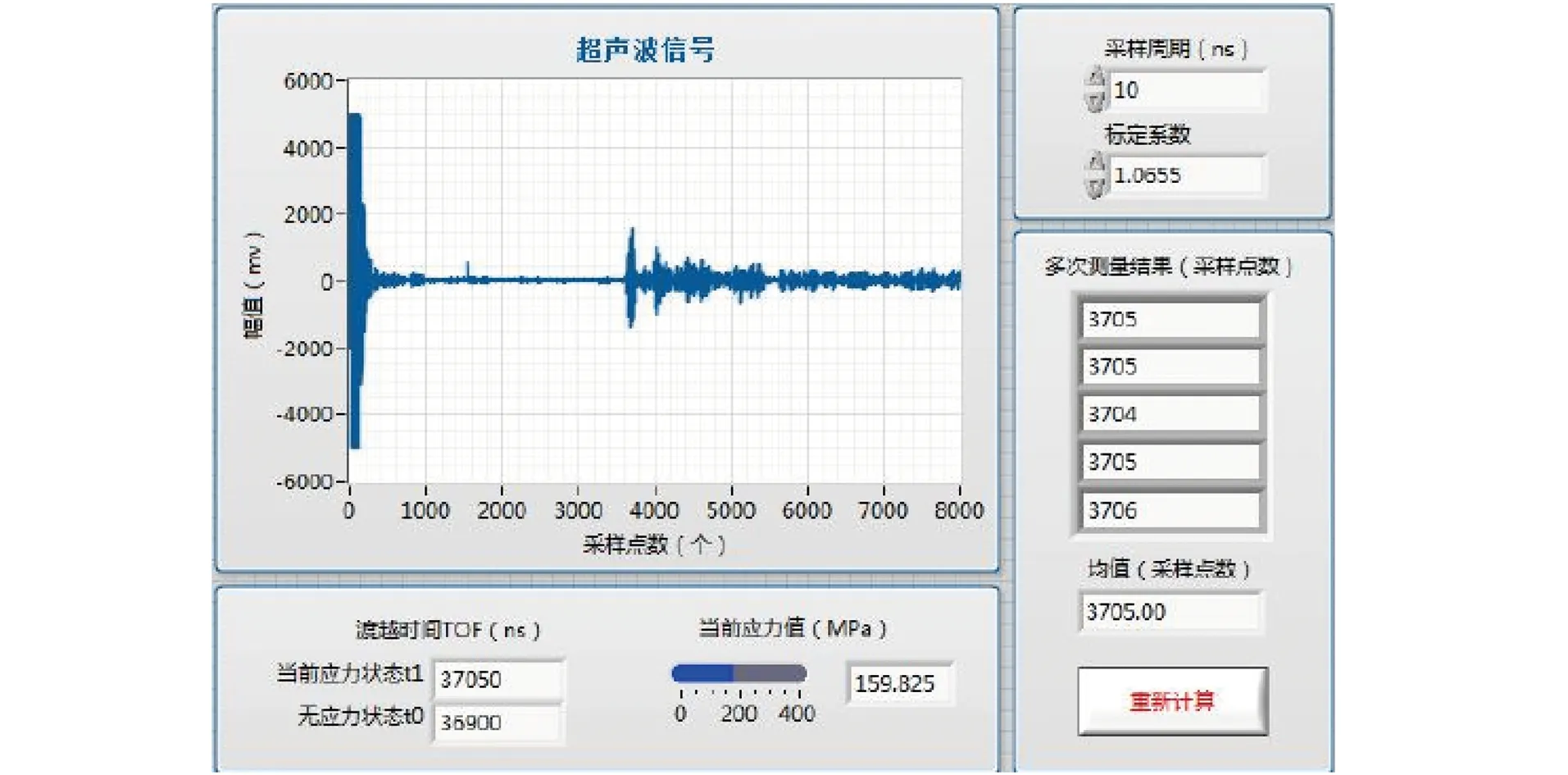
图4 远程监控人机界面显示
4 结语
螺栓作为偏航制动器的紧固件,其受力状态直接影响到整个风机的运行安全性。文章使用脉冲反射法测量螺栓应力,配合上位机数据采集分析系统,实时检测螺栓受力状态。对于同型号的偏航螺栓,建立了反映应力和声时差关系系数的标定试验曲线,将系数添加到分析系统中便可计算出应力。为了提高应力测量精度,笔者设计了换能器的直径和开角,可使波束全部打在螺栓底部,减少了螺栓侧面对声波的反射,保证了声时测量精度;通过LABVIEW和MATLAB软件同时对回波数据进行处理,能准确求出声时差和螺栓轴向应力。
猜你喜欢
机电信息(2022年9期)2022-05-07
水下无人系统学报(2020年1期)2020-03-06
电子制作(2018年23期)2018-12-26
电子制作(2018年2期)2018-04-18
舰船电子工程(2017年11期)2017-12-25
小猕猴智力画刊(2017年6期)2017-07-03
小溪流(画刊)(2017年5期)2017-06-15
汽车科技(2015年1期)2015-02-28
汽车零部件(2014年5期)2014-11-11
汽车零部件(2014年5期)2014-11-11